













































































































































































































































































BIQU Panda Perch HT - uchwyt na AMS HT do Panda Perch H2 - 2szt.
Indeks: BTT-27924
- Nowość!
- Darmowa dostawa
BIQU Panda Perch HT - uchwyt na AMS HT do Panda Perch H2 - 2szt.

Ramię robota 5-DOF Grab-it do Raspberry Pi i Arduino - Joy-IT Robot02

xTool F1 - grawerka laserowa diodowa 10W i podczerwona 2W - Outlet


Moduł sieciowy Ethernet dla Teensy 4.1 - SparkFun PRT-29920

LPS28DFW - czujnik ciśnienia I2C - STEMMA QT/Qwiic - Adafruit 6067


Stacja lutownicza 2w1 hotair i grotowa WEP 992D

Oscyloskop analogowy NDN DF4321C - 20MHz 2 kanały

Filament Fiberlogy R PLA 1,75mm 0,85kg - Anthracite
Zrozumieć Elektronikę (5/2026) - miesięcznik, wydanie cyfrowe

Siłownik elektryczny LA10P 500N 13mm/s 12V z potencjometrem - wysuw 5cm

Filament Fiberlogy Impact PLA 1,75mm 0,85kg - Orange
Produkty, których sprzedaż została zakończona.

Sharp GP2Y0D810Z0F - cyfrowy czujnik odległości 10cm - Pololu 1135
Cyfrowy czujnik odległości Sharp GP2Y0D810Z0F wykrywający obiekty w odległości do 10 cm.
Konwerter USB-UART FTDI 5V miniUSB - SparkFun DEV-09716
Niewielki konwerter umożliwia komunikacje pomiędzy interfejsami szeregowymi USB i UART. Pozwala na wymianę danych między komputerem a układami wykorzystującymi...
Siłownik liniowy LACT4P-12V-20 500N 13mm/s 12V - wysuw 10cm - Pololu 2305
Aktuator liniowy z przekładnią 20:1 działający z obciążeniem do 50 kg i prędkością 1,3 cm/s. Zasilany jest napięciem 12 V, pobiera 500 mA prądu bez obciążenia (maks. do 10 A)....
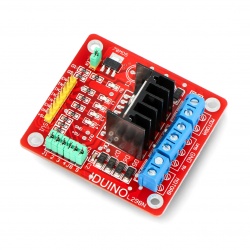
A4990 - dwukanałowy sterownik silników 32V/0,65A - Shield dla Arduino - Pololu 2512
Moduł z dwukanałowym układem A4990 pracujący z napięciami od 6 V do 32 V i prądem do 0,65 A na kanał (maks. 0,9 A). Układ można połączyć bezpośrednio z płytką Arduino.


D24V5F15 - przetwornica step-down - 15V 0,5A - Pololu 2847
Moduł przetwornicy impulsowej step-down o sprawności rzędu 80 % - 93 %. Zamienia napięcie wejściowe z zakresu od 15,1 V do 36 V na wartość wyjściową 15,0 V. Maksymalny prąd...
Silnik z przekładnią 25Dx69L 75:1 6V 75RPM + enkoder CPR 48 - Pololu 4826
Silnik wysokiej mocy z przekładnią 74.83:1, 75 obr/min, moment obrotowy 6,1 kg*cm (0,6 Nm). Urządzenia posiada enkoder kwadraturowy o rozdzielczości 48 impulsy na obrót (po...
Silnik z przekładnią 25Dx52L HP 34:1 6V 285RPM + enkoder CPR 48 - Pololu 4804
Silnik wysokiej mocy z przekładnią 34.014 : 1, 285 obr/min, moment obrotowy 4,3 kg*cm (0,42 Nm). Urządzenia posiada enkoder kwadraturowy o rozdzielczości 48 impulsy na obrót...
Silnik 25Dx52L HP z przekładnią 47:1 6V 210RPM - Pololu 1574
Silnik firmy Pololu z przekładnią 47:1, generuje 210 obr/min, moment obrotowy wynosi 5,8 kg*cm (0,57 Nm). Zasilany napięciem 6 V, średni pobór prądu to ok. 450 mA (maks. 6000...
Silnik 25Dx48L z przekładnią 9,7:1 6V 580RPM - Pololu 1582
Silnik firmy Pololu z przekładnią 9.7:1, generuje 580 obr/min, moment obrotowy wynosi 0,79 kg*cm (0,078 Nm). Zasilany napięciem 6 V, średni pobór prądu to ok. 80 mA (maks. 2200...
Silnik 25Dx50L z przekładnią 20,4:1 6V 275RPM - Pololu 1583
Silnik firmy Pololu z przekładnią 20.4:1, generuje 275 obr/min, moment obrotowy wynosi 1,7 kg*cm (0,16 Nm). Zasilany napięciem 6 V, średni pobór prądu to ok. 80 mA (maks. 2200...
Silnik HP 150:1 obustronny wał - Pololu 2386
Miniaturowy silnik wysokiej mocy firmy Pololu z przekładnią 150:1, posiada 200 obr/min, moment obrotowy wynosi 2,9 kg*cm (0,28 Nm). Posiada przedłużony wał, umożliwiający...

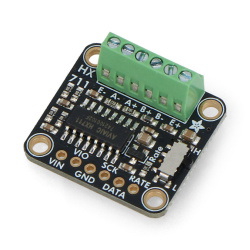
MC33926 - dwukanałowy sterownik silników 28V/3A - shield dla Raspberry Pi - Pololu 2755
Moduł z dwukanałowym sterownikiem silników MC33926 pracujący z napięciami od 5 V do 28 V i prądem do 3 A na kanał (maks. 5 A). Układ można połączyć bezpośrednio ze złączami...

Silnik HPCB 210:1 obustronny wał - Pololu 3077
Miniaturowy silnik wysokiej mocy firmy Pololu z wytrzymałymi, karbonowymi szczotkami. Posiada przekładnie 210:1 , prędkość obrotowa to 140 obr/min , moment obrotowy wynosi...
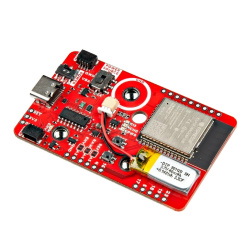
Płytka rozwojowa BLE400 + moduł Bluetooth 4.0 NRF51822 - Waveshare 9549
Płytka rozwojowa wraz z modułem Bluetooth Core51822 opartym na układzie nRF51822. Wyposażona jest w interfejsy UART, I2C i SPI oraz konwerter USB-UART CP2102. Pracuje z...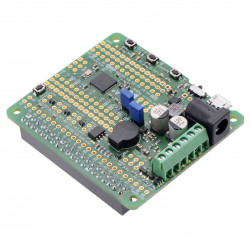
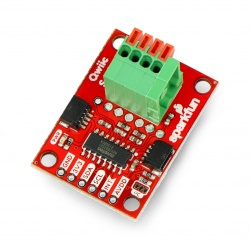
A-Star 32U4 Robot Controller SV 36V/1,7A - rozszerzenie do Raspberry Pi - Pololu 3119
Programowalny układ wyposażony w znany z Arduino Leonardo mikrokontroler Atmega32u4 z zainstalowanym bootloaderem. Posiada dwukanałowy sterownik silników 36 V / 1,7 A oraz...
Siłownik liniowy LACT2-12V-20 500N 13mm/s 12V - wysuw 5cm - Pololu 2302
Aktuator liniowy z przekładnią 20:1 działający z obciążeniem do 50 kg i prędkością 1,3 cm/s. Zasilany jest napięciem 12 V, pobiera 500 mA prądu bez obciążenia (maks. do 10 A)....
Siłownik liniowy LACT4-12V-20 500N 13mm/s 12V - wysuw 10cm - Pololu 2304
Aktuator liniowy z przekładnią 20:1 działający z obciążeniem do 50 kg i prędkością 1,3 cm/s. Zasilany jest napięciem 12 V, pobiera 500 mA prądu bez obciążenia (maks. do 10 A)....
Siłownik liniowy LACT4P-12V-5 150N 43mm/s 12V - wysuw 10cm - Pololu 2319
Aktuator liniowy z przekładnią 5:1 działający z obciążeniem do 15 kg i prędkością 4,3 cm/s. Zasilany jest napięciem 12 V, pobiera 500 mA prądu bez obciążenia (maks. do 10 A)....
Siłownik liniowy LACT6-12V-20 500N 13mm/s 12V - wysuw 15cm - Pololu 2306
Aktuator liniowy z przekładnią 20:1 działający z obciążeniem do 50 kg i prędkością 1,3 cm/s. Zasilany jest napięciem 12 V, pobiera 500 mA prądu bez obciążenia (maks. do 10 A)....
Siłownik liniowy LACT6P-12V-20 500N 13mm/s 12V - wysuw 15cm - Pololu 2307
Aktuator liniowy z przekładnią 20:1 działający z obciążeniem do 50 kg i prędkością 1,3 cm/s. Zasilany jest napięciem 12 V, pobiera 500 mA prądu bez obciążenia (maks. do 10 A)....Zobacz również