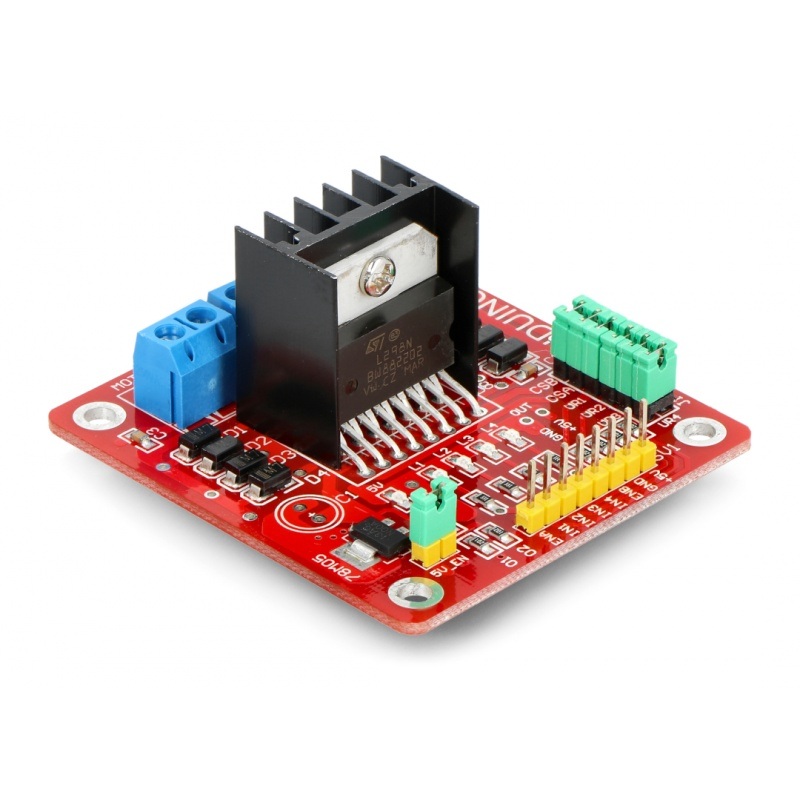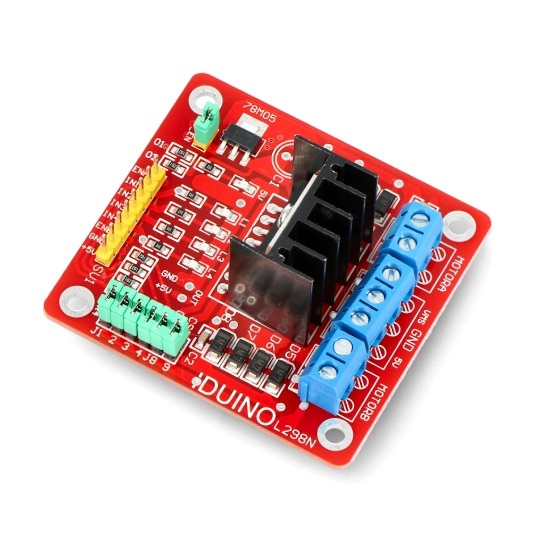




Moduł z dwukanałowym sterownikiem silników prądu stałego L298N. Zasilany jest napięciem od 5 V do 46 V. Maksymalny prąd kanał wynosi 2 A. Układ posiada wbudowany regulator napięcia 5 V, do zasilania części logicznej.
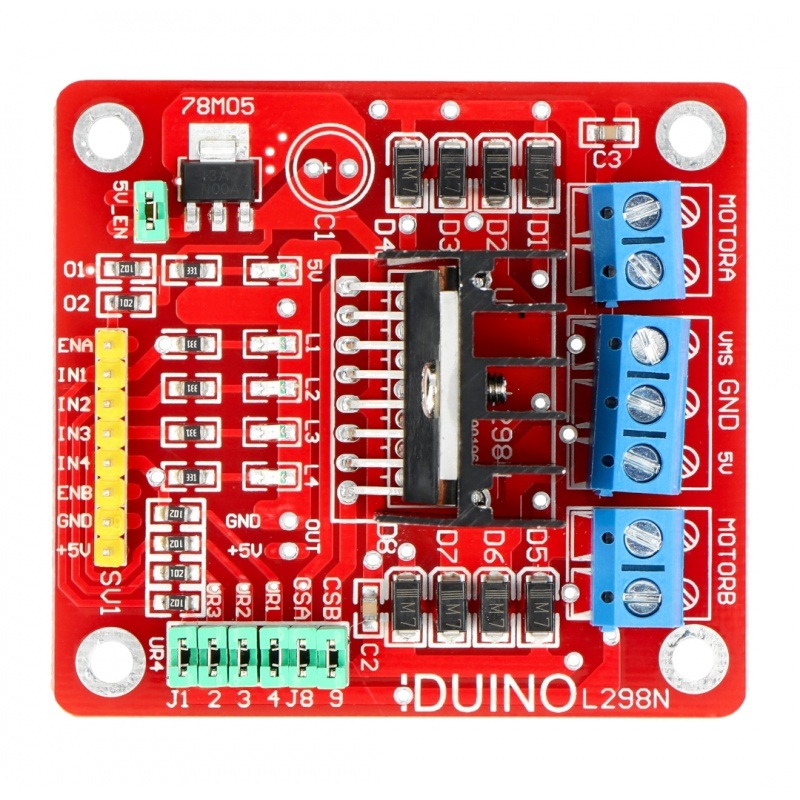
Moduł z popularnym sterownikiem L298N, który umożliwia kontrolę kierunku obrotów i prędkości dwóch silników prądu stałego. Dzięki złączom śrubowym ARK zasilanie, oraz same silniki można w prosty sposób podłączyć przykręcając przewody przy pomocy wkrętaka. Sygnały sterujące zostały wyprowadzane na popularne złącza goldpin, co pozwala łączyć układ z płytkami uruchomieniowymi, np. z Arduino za pomocą przewodów.
| Dla użytkowników Arduino dostępny jest przykładowy program ułatwiający obsługę modułu. |
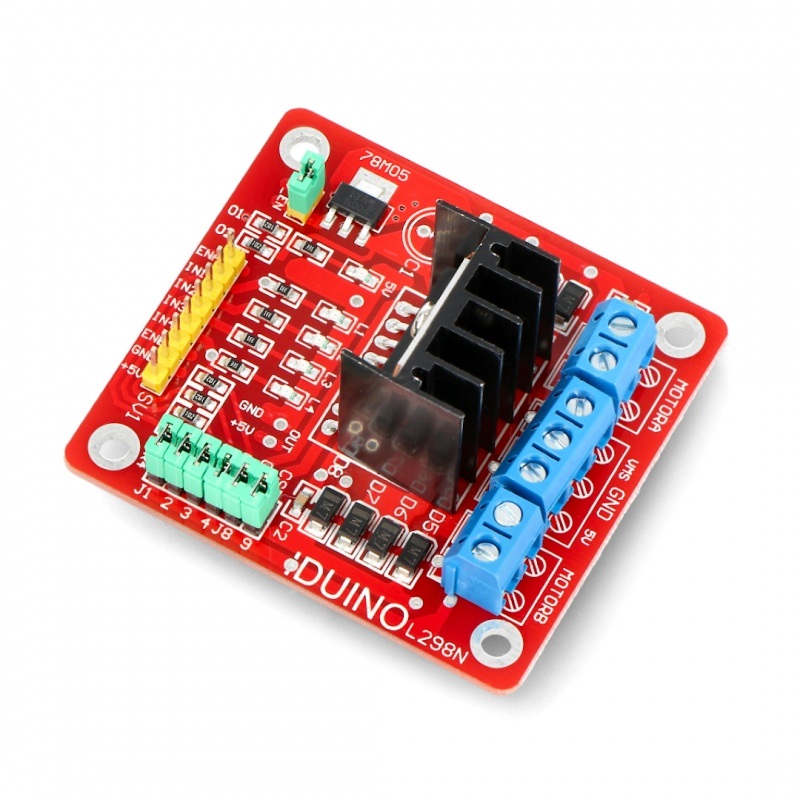
 Dwukanałowy sterownik silników L298N - moduł WB291111 - Iduino ST1112.
Dwukanałowy sterownik silników L298N - moduł WB291111 - Iduino ST1112.
Film opisujący działanie mostka H - sterownika silników prądu stałego.
W naszej ofercie znajdziesz również układ scalony L298.

| Pin | Opis |
|---|---|
| VMS | Napięcie zasilania silników od 5 V do 46 V. |
| 5V | Zasilanie części logicznej za stabilizatorem - aktywne po wyjęciu zworki 5V. |
| GND | Masa układu |
| MOTOR A |
Wyjścia kanału silnika A. |
| MOTOR B |
Wyjścia kanału silnika B. |
| ENA | Sygnał PWM do sterownia prędkością obrotową silnika A. |
| IN1, IN2 | Sterowanie kierunkiem kanału A |
| ENB | Sygnał PWM do sterownia prędkością obrotową silnika B. |
| IN3, IN4 | Sterowanie kierunkiem kanału B |
|
IN1 / IN3 |
IN2 / IN4 |
Wyjścia silników |
|---|---|---|
|
stan |
stan niski |
Silnik kręci się z maksymalną prędkością zadaną poprzez pwm (różną od 0) zgodnie ze wskazówkami zegara. |
| stan niski |
stan wysoki |
Silnik kręci się z maksymalną prędkością zadaną poprzez pwm (różną od 0) przeciwnie do ruchu wskazówek zegara. |
| stan niski |
stan niski |
Przy podaniu stanu wysokiego na wejście PWM - szybkie hamowanie silników (fast stop). |
| stan wysoki |
stan wysoki |
Przy podaniu stanu wysokiego na wejście PWM - szybkie hamowanie silników (fast stop). |
| stan wysoki |
stan wysoki |
Przy podaniu stanu niskiego na wejście PWM - swobodne hamowanie (soft stop). |
| Napięcie zasil. od | 5.0 V |
| Napięcie zasil. do | 46 V |
| Wydajność prąd | 2 A |
| Ilość kanałów | 2 |
| Klasyfikacja GPSR | Komponent |
| Szerokość opakowania | 5.8 cm |
| Wysokość opakowania | 6.5 cm |
| Głębokość opakowania | 3.5 cm |
| Masa opakowania | 0.033 kg |
Jako pierwszy zadaj pytanie dotyczące tego produktu!

Informacja o produkcie
Produkt jest komponentem przeznaczonym do dalszego montażu/prototypowania. Nie stanowi on samodzielnego wyrobu gotowego w rozumieniu przepisów o bezpieczeństwie produktów.
Dane GPSR
Kraj pochodzenia: Chiny
Dane kontaktowe producenta: OPEN SMART TECHNOLOGY LIMITED OPEN SMART TECHNOLOGY LIMITED SZ OFFICE: Rm1419 - 1422, Block C, SUNAC Intelligence Mansion, LongHua District, ShenZhen, GuangDong, China
Dane kontaktowe wprowadzającego na rynek UE: BOTLAND B. DERKACZ SP. K. Gola 25A - 63-640 Bralin







")