
































































































































































































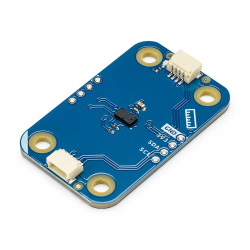












































































































































































Moduł DFRobot Gravity z czujnikiem Halla przeznaczony do pomiaru i monitorowania natężenia pola magnetycznego. Wyposażony jest w 3 piny analogowe i wskaźnik LED, który sygnalizuje wykryte pole magnetyczne. Zasilany jest napięciem od 3,3 V do 5 V, jego prąd zasilania wynosi od 4,2 mA do 8 mA. Cechuje się niskim poziomem szumów, przez co możliwe są jedynie minimalne zakłócenia. Integruje się z takimi kontrolerami jak Arduino, Micro:bit oraz UNIHAKER, dzięki czemu sprawdzi się np. w detekcji pozycji i prędkości w robotyce czy systemach bezpieczeństwa.
Produkt kompatybilny z Arduino
Producent przygotował szczegółowy przewodnik użytkownika, który zawiera opis projektów z wykorzystaniem czujnika oraz przykładowy kod programu.
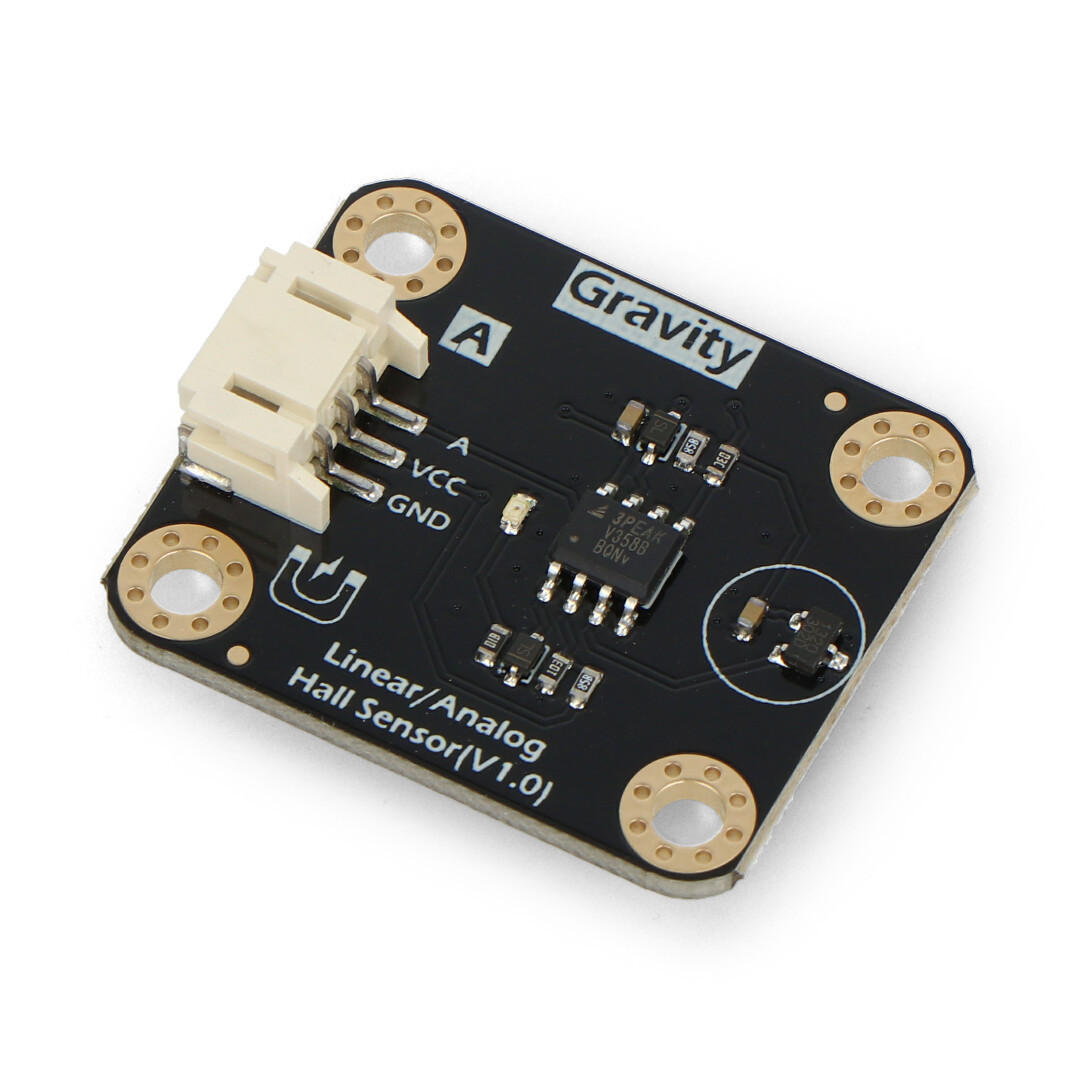
DFRobot Gravity - liniowy / analogowy czujnik pola magnetycznego Halla - DFR1132.
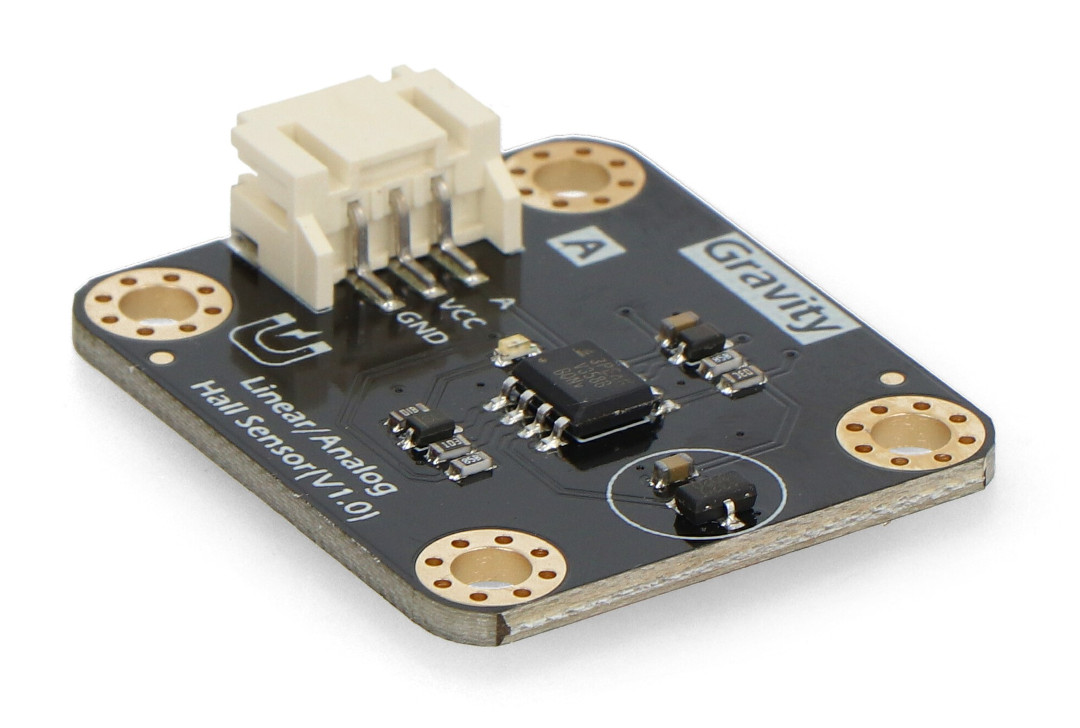
Moduł DFRobot Gravity z czujnikiem Halla.
Czujnik współpracuje z mikrokontrolerem wyposażonym w wejścia analogowe (Arduino, Micro:bit, UNIHIKER). W celu rozpoczęcia pracy należy podłączyć:
Po podłączeniu, czujnik będzie generować sygnał analogowy proporcjonalny do siły wykrywanego pola magnetycznego, co pozwala na dokładne monitorowanie zmian pola i przetwarzanie wyników w projektach elektronicznych.
 Kompatybilny z Arduino, Micro:bit oraz UNIHAKER.
Kompatybilny z Arduino, Micro:bit oraz UNIHAKER.
Zaawansowana płytka od DFRobot Gravity DFR1132 posiada obwody w rdzeniu, które przekształcają siłę indukcji magnetycznej bezpośrednio w napięcie wyjściowe. Wysoka dokładność pozwala na zastosowanie czujnika do wielu rozwiązań, które wymagają precyzyjnego wykrywania pola magnetycznego. Mogą to być projekty związane ze sterowaniem przemysłowym, pracami do badań naukowych, systemów bezpieczeństwa oraz różne projekty z urządzeniami elektronicznymi. Czujnik reaguje na pola magnetyczne gdy:

Zawartość zestawu.
| Napięcie zasil. od | 3.3 V |
| Napięcie zasil. do | 5.0 V |
| Klasyfikacja GPSR | Komponent |
| Szerokość opakowania | 5.7 cm |
| Wysokość opakowania | 6.2 cm |
| Głębokość opakowania | 2.7 cm |
| Masa opakowania | 0.012 kg |
Jako pierwszy zadaj pytanie dotyczące tego produktu!
Kraj pochodzenia: Chiny
Dane kontaktowe producenta: Zhiwei Robotics Corp. Unit 01, 26/F, A1 Shanghai T & I Tower, No. 1699 Zhongke Road, Pudong District, Shanghai, P.R.China [email protected]
Dane kontaktowe wprowadzającego na rynek UE: BOTLAND B. DERKACZ SP. K. Gola 25A - 63-640 Bralin [email protected]
Informacja o produkcie
Produkt jest komponentem przeznaczonym do dalszego montażu/prototypowania. Nie stanowi on samodzielnego wyrobu gotowego w rozumieniu przepisów o bezpieczeństwie produktów.