


VR IMU Breakout od SparkFun to moduł z czujnikiem IMU przeznaczony do zastosowania w obszarze wirtualnej rzeczywistości (VR). Został wyposażony w wydajny układ BNO086 firmy CEVA, który stanowi połączenie 3-osiowego akcelerometru, żyroskopu i magnetometru (SiP), a także zawiera 32-bitowy procesor z rdzeniem ARM Cortex M0+. Moduł generuje bardzo dokładne wskazania wektorów obrotu, rotacji GRV i rotacji geomagnetycznej, dzięki czemu może być wykorzystywany do płynnego i precyzyjnego śledzenia ruchu. Wszystkie dane gromadzone przez czujnik są łączone i korygowane pod kątem dryftu, co pozwala uzyskać stabilność pomiarów i eliminuje ryzyko występowania błędów. VR IMU Breakout stanowi idealne rozwiązanie do aplikacji, które wymagają wykrycia orientacji lub ruchu, ponieważ dostarcza użytkownikowi wysoce realistycznych doświadczeń w obszarze wirtualnej rzeczywistości.
Przed rozpoczęciem pracy z VR IMU Breakout koniecznie sprawdź przewodnik użytkownika przygotowany przez producenta!
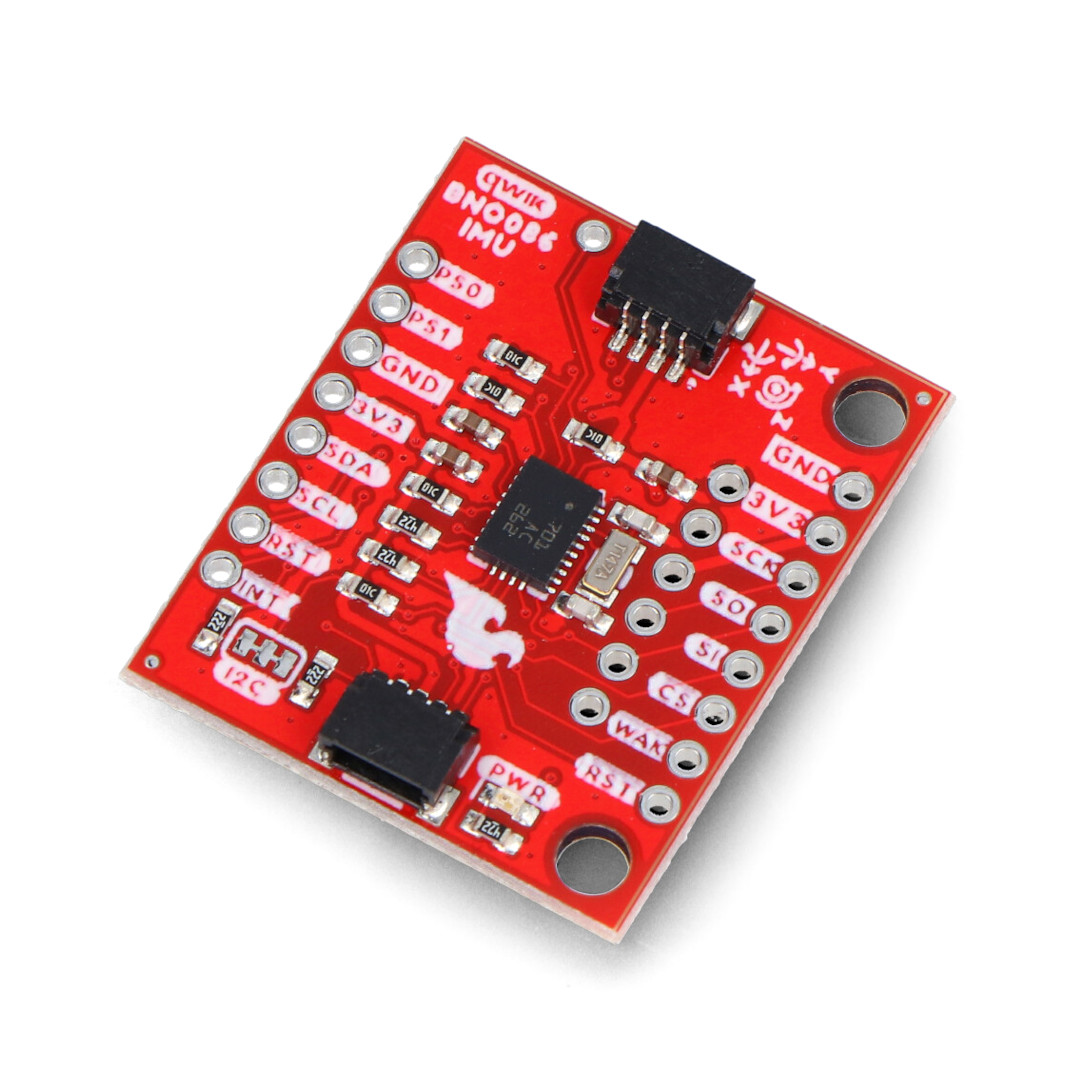
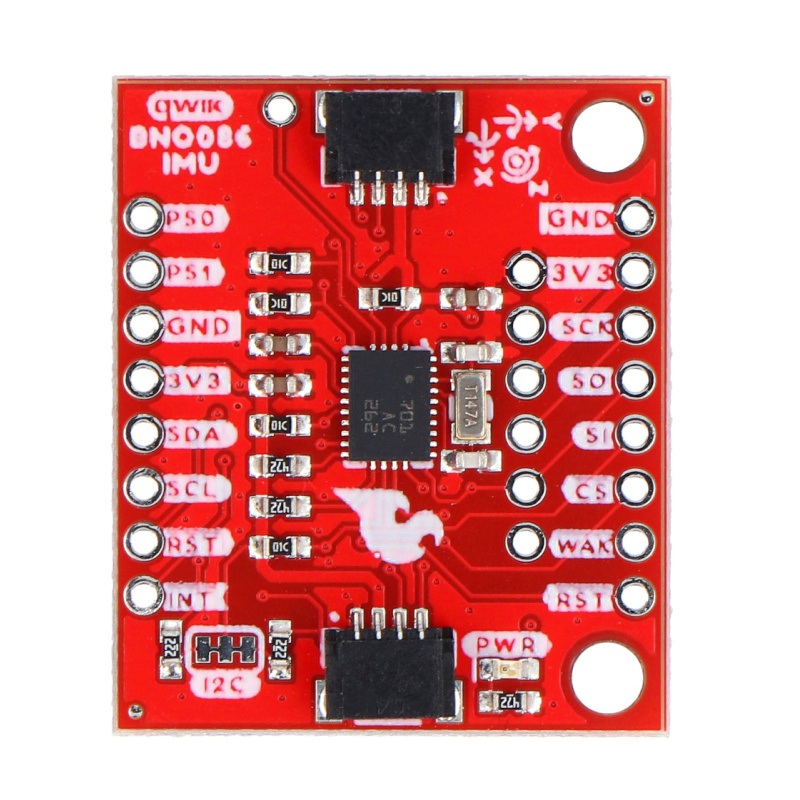
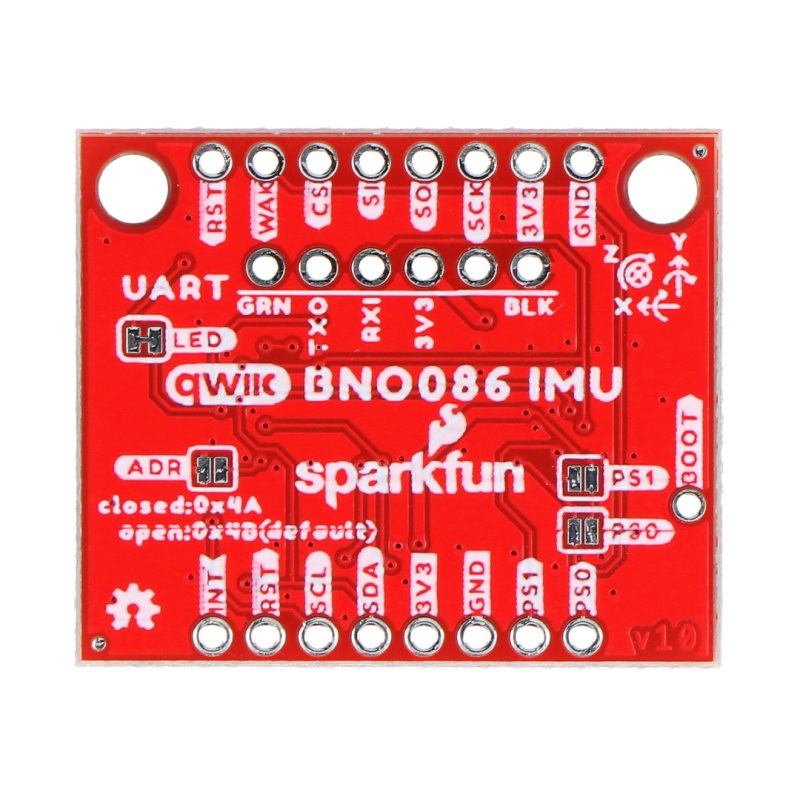
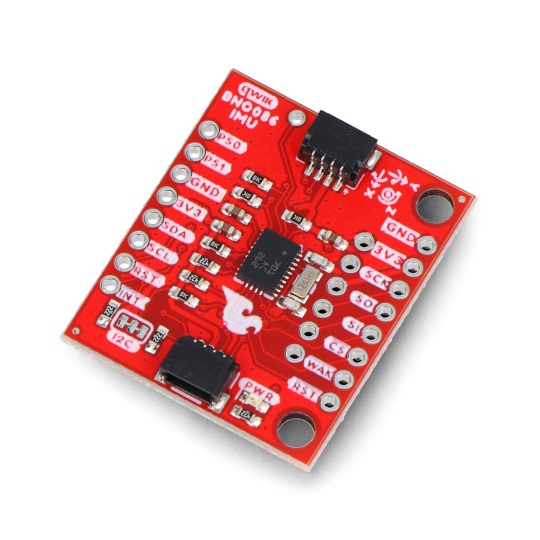
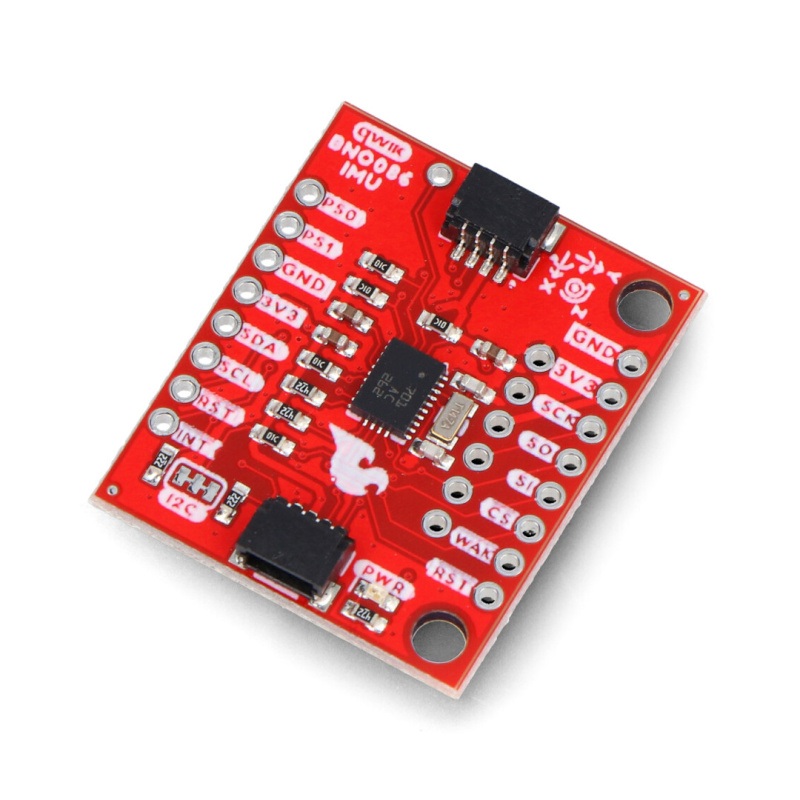
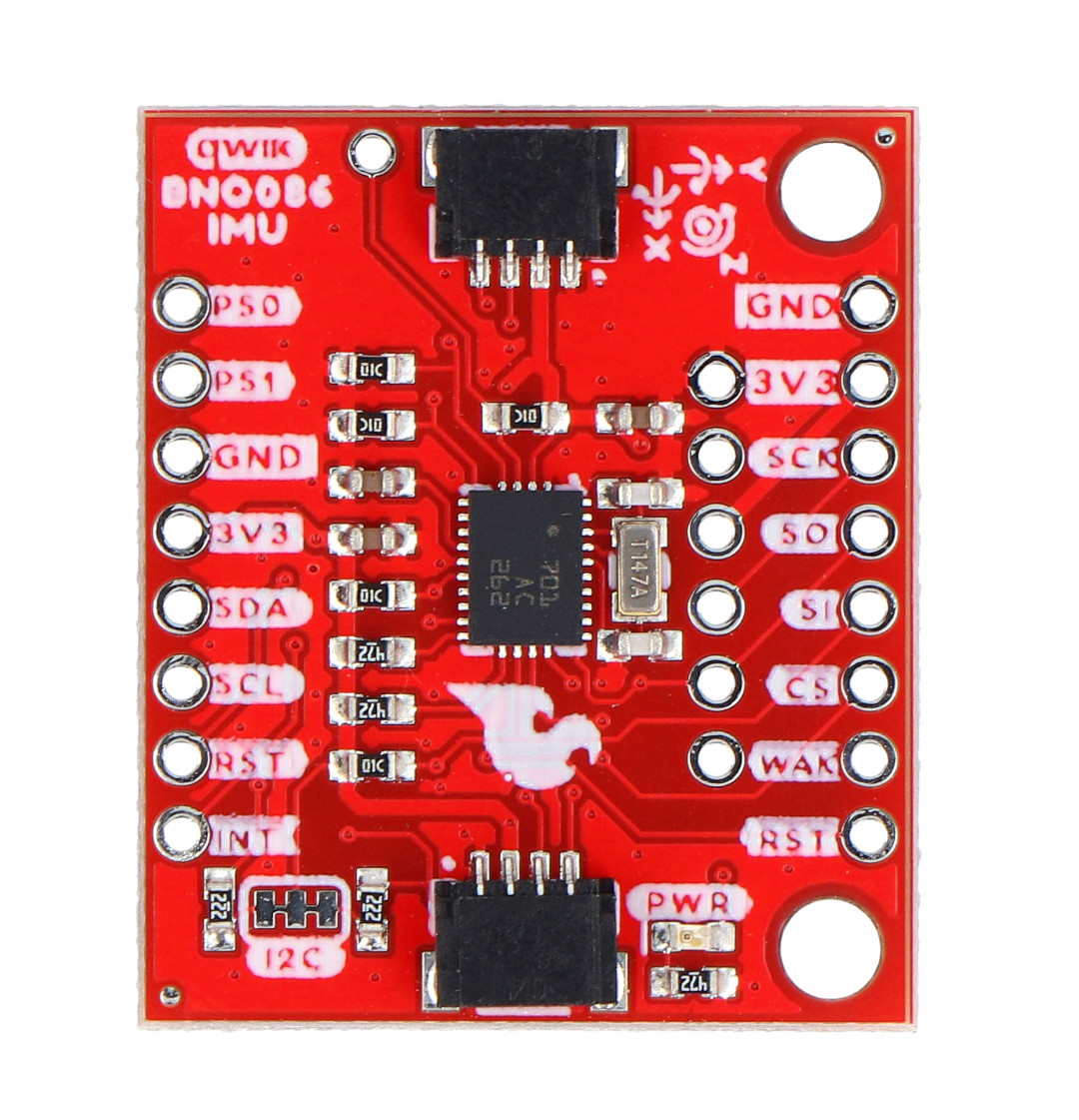
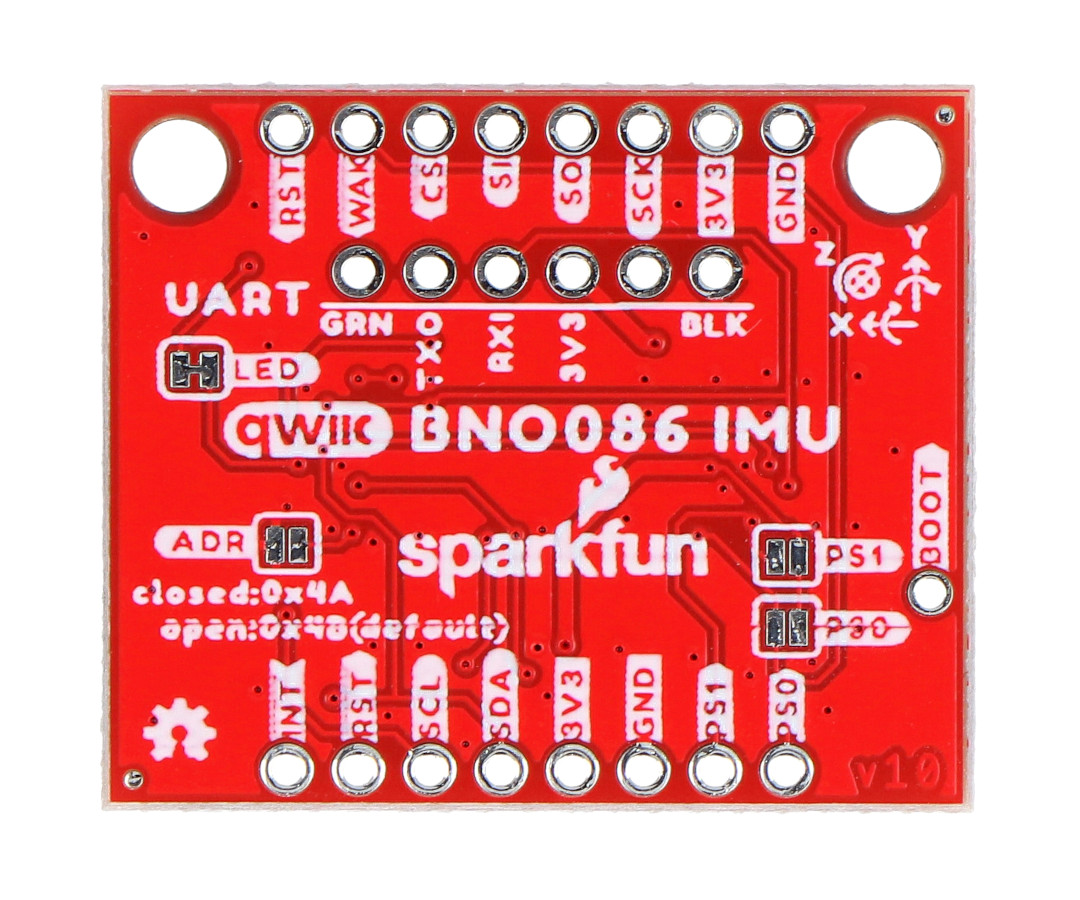
VR IMU Breakout - moduł VR z czujnikiem IMU - BNO086 - Qwiic - SparkFun SEN-22857.
Moduł posiada dwa złącza Qwiic.
Wirtualna rzeczywistość (VR) to technologia, która umożliwia tworzenie symulowanych środowisk za pomocą komputerów. Przenosi użytkowników do w pełni zanurzających, trójwymiarowych wirtualnych światów, które mogą być zarówno realistyczne, jak i fantastyczne. Ma szerokie zastosowania, od rozrywki w postaci np. gry wideo, wirtualnych wycieczek, po edukację - symulacje treningowe, wirtualne lekcje, a także zdrowie (terapia, trening chirurgiczny) czy szeroko pojęty biznes (projektowanie produktów, spotkania wirtualne). Do najbardziej znanych urządzeń VR należą okulary VR, które mogą być podłączone do komputera lub konsoli do gier, a także autonomiczne zestawy VR, które nie wymagają zewnętrznych źródeł obliczeniowych.
W zestawie znajduje się jedynie płytka - okulary VR i pozostałe akcesoria należy nabyć osobno.
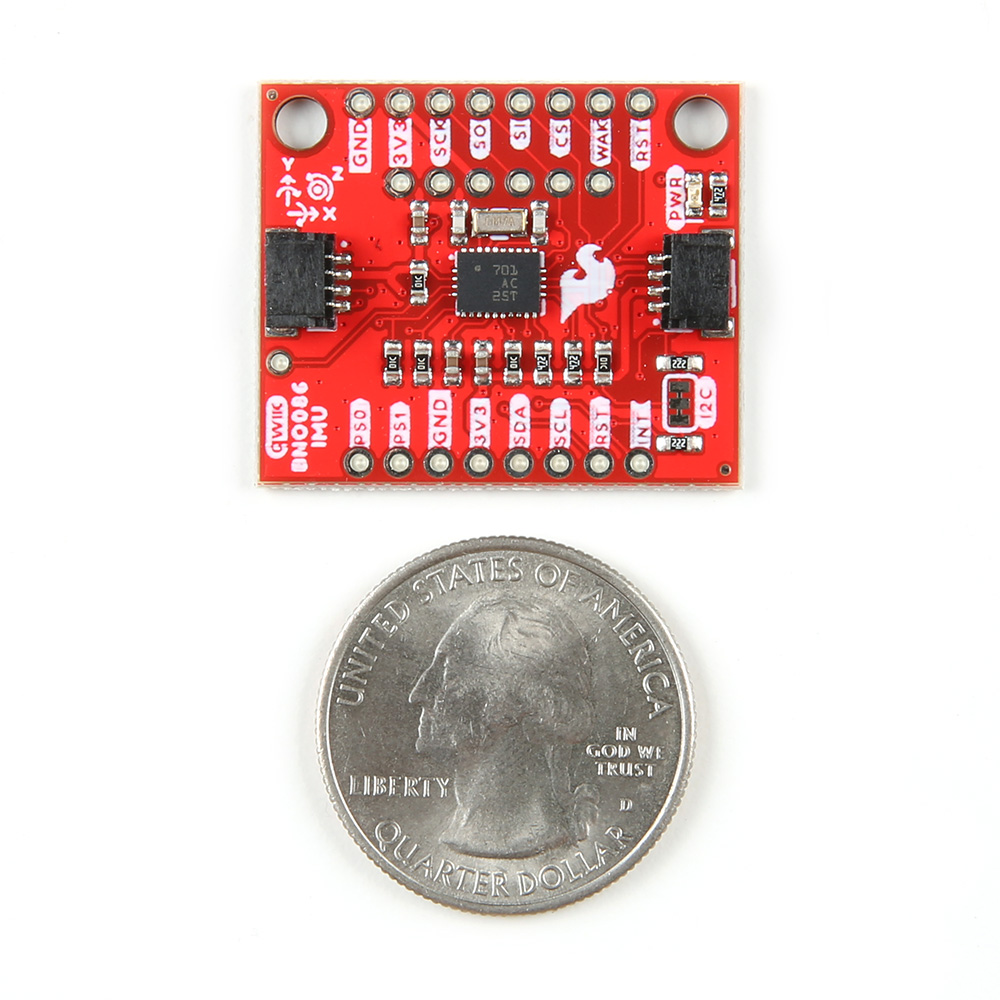
Moduł jest kompaktowy i lekki.
Przydatne linki |
| Klasyfikacja GPSR | Komponent |
| Szerokość opakowania | 5 cm |
| Wysokość opakowania | 11 cm |
| Głębokość opakowania | 0.5 cm |
| Masa opakowania | 0.003 kg |
Jako pierwszy zadaj pytanie dotyczące tego produktu!

Informacja o produkcie
Produkt jest komponentem przeznaczonym do dalszego montażu/prototypowania. Nie stanowi on samodzielnego wyrobu gotowego w rozumieniu przepisów o bezpieczeństwie produktów.
Dane GPSR
Kraj pochodzenia: Stany Zjednoczone
Dane kontaktowe producenta: SparkFun Electronics 6333 Dry Creek Pkwy, Niwot, CO 80503, Stany Zjednoczone
Dane kontaktowe wprowadzającego na rynek UE: BOTLAND B. DERKACZ SP. K. Gola 25A - 63-640 Bralin