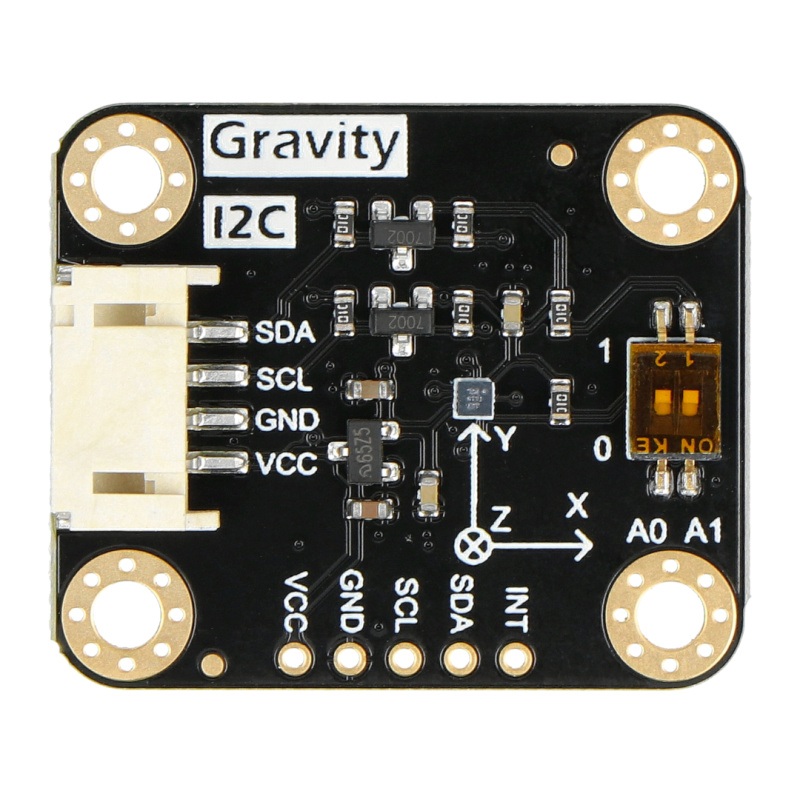
































































































































































































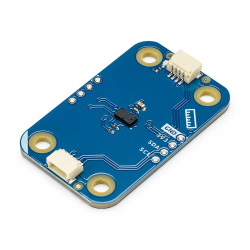














































































































































































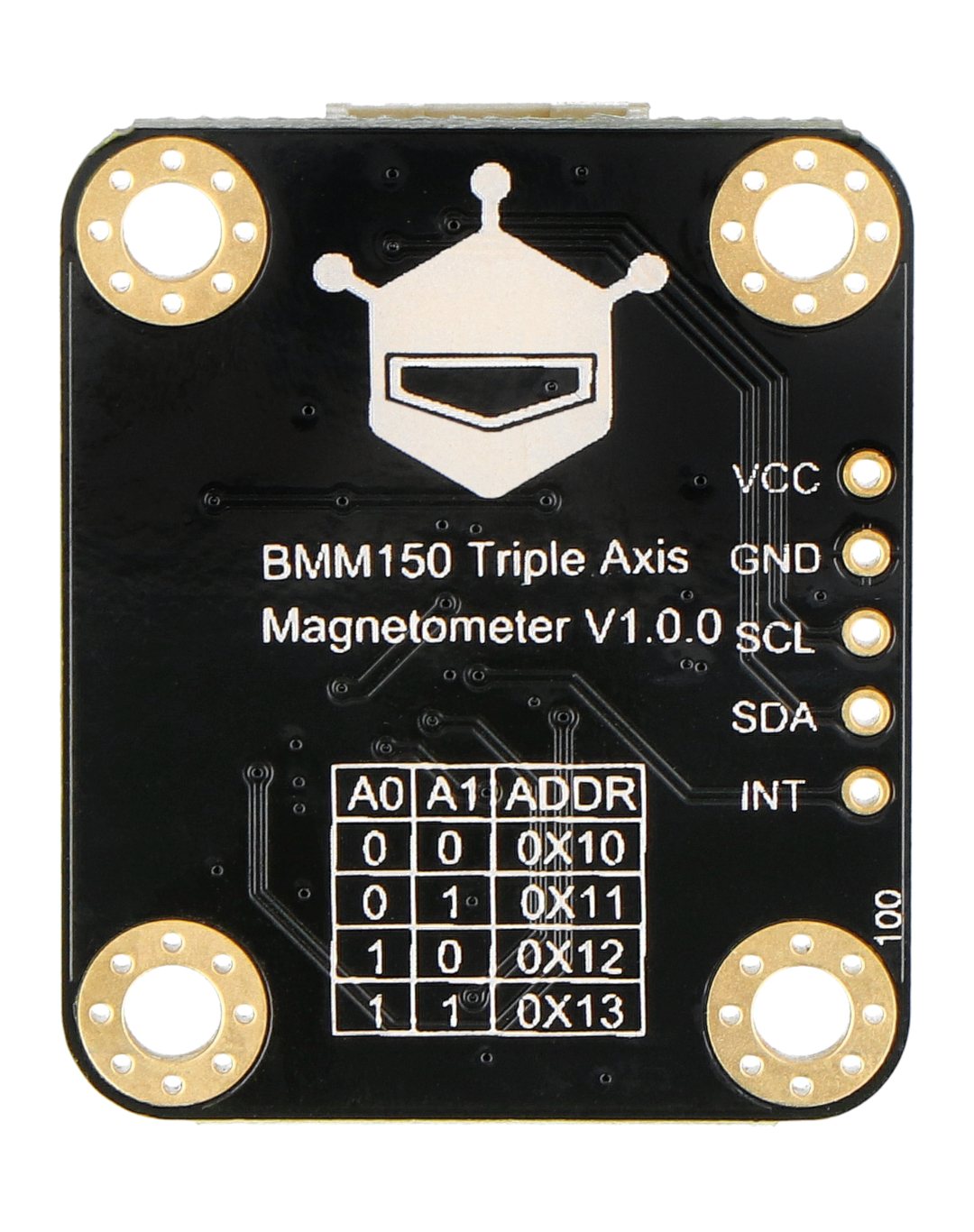
Trzyosiowy magnetometr firmy DFRobot z układem Bosh BMM150 opartym na technologii FlipCore. Moduł pozwala na pomiar pola magnetycznego w trzech prostopadłych w zakresie ± 1300 uT (oś X i Y) oraz ± 2500 uT (oś Z) z rozdzielczością pomiaru 0,3 uT. Moduł dostarcza informacji o absolutnej orientacji z zachowaniem wysokiej dokładności i precyzji pomiarów. Na płytce umieszczono złącze Gravity pozwalające na szybkie podłączanie elementów. Czujnik wykorzystuje magistralę I2C do komunikacji z podłączonymi urządzeniami. Posiada także 2-bitowy przełącznik DIP, za pomocą którego można dokonać konfiguracji adresu I2C (dostępne 4 adresy). Moduł z układem BMM150 znajduje zastosowanie w takich obszarach jak nawigacja i pozycjonowanie robotów, kompas elektryczny, mapa elektryczna.
Energooszczędny trzyosiowy czujnik geomagnetyczny od DFRobot.
Produkt jest kompatybilny z Arduino
Na stronie producenta dostępy jest szczegółowy przewodnik użytkownika - sprawdź!
Gravity - 3-osiowy magnetometr - BMM150 - I2C - DFRobot SEN0529.
Do najczęściej pojawiających się pytań należą: co to jest magnetometr? Do czego służy magnetometr? Odpowiedzi na te pytania (i nie tylko) znajdziesz na naszym blogu w artykule Magnetometr – jak to działa i do czego służy?
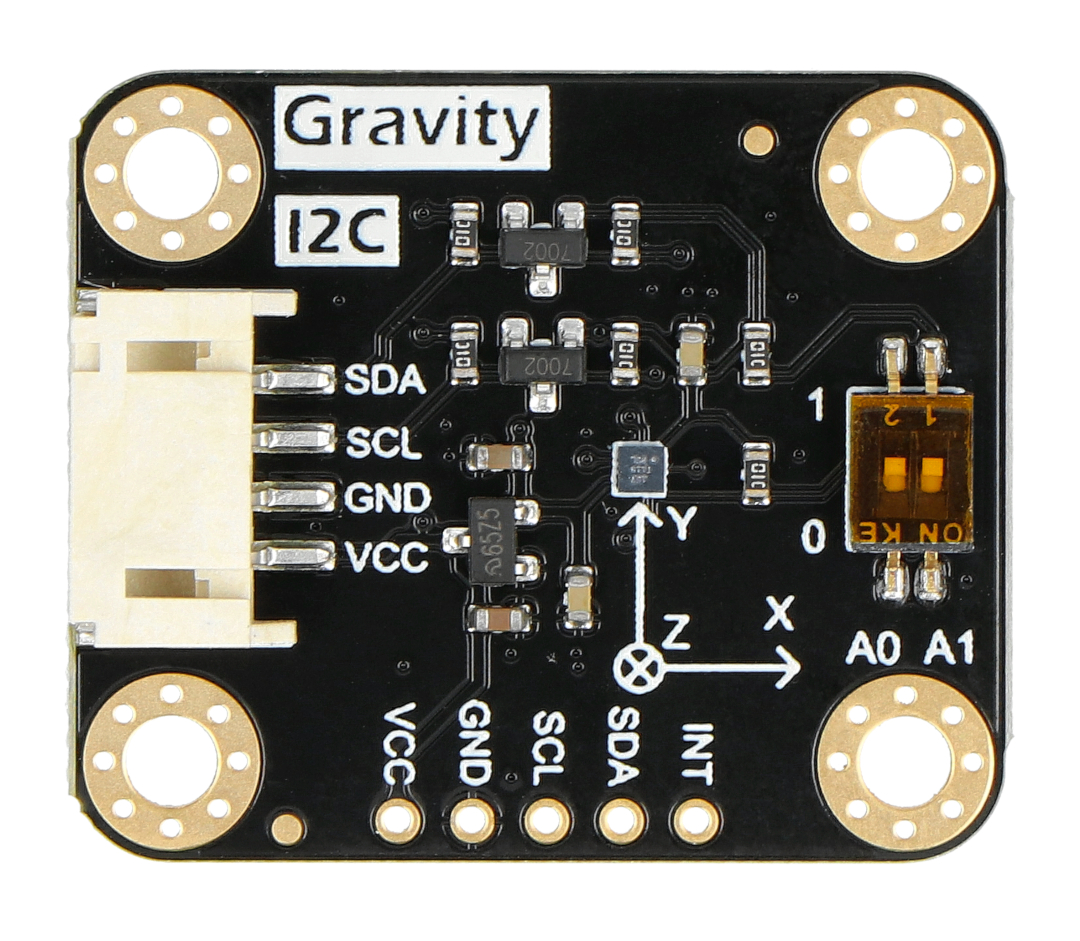
Moduł posiada wyprowadzenia w postaci pól lutowniczych, do których należy przylutować zawartą w zestawie listwę goldpin, oraz złącze Gravity pozwalające na podłączenie bez konieczności lutowania. Każde wyprowadzenie zostało opisane, co znacząco ułatwia podłączanie.
W przewodniku użytkownika znajdziesz także przykładowe kody programu.
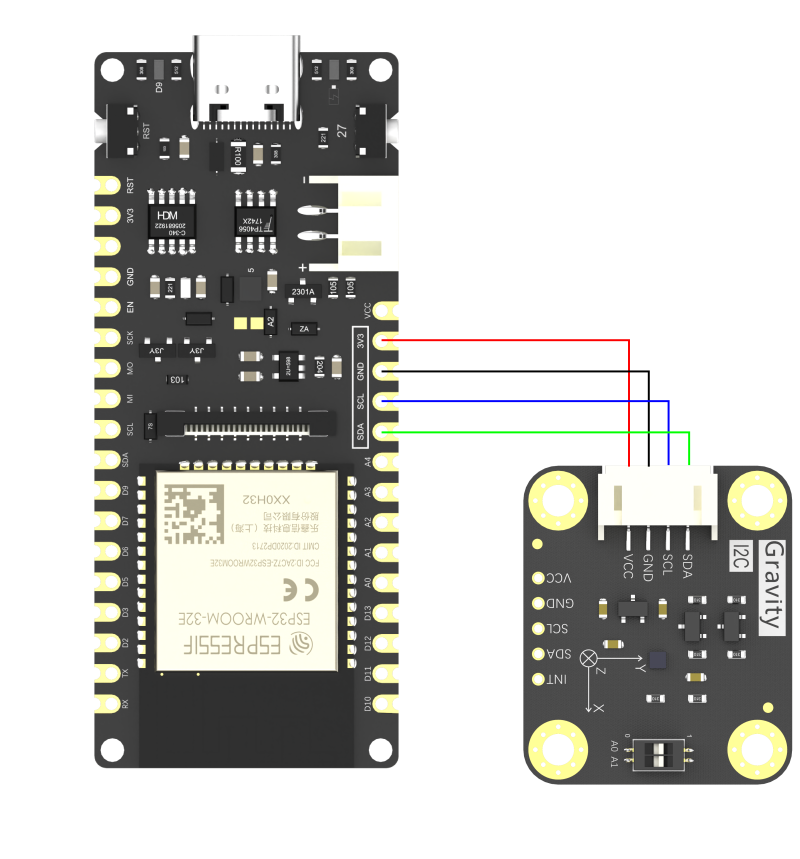
Schemat połączenia czujnika z FireBeetle ESP32-E.
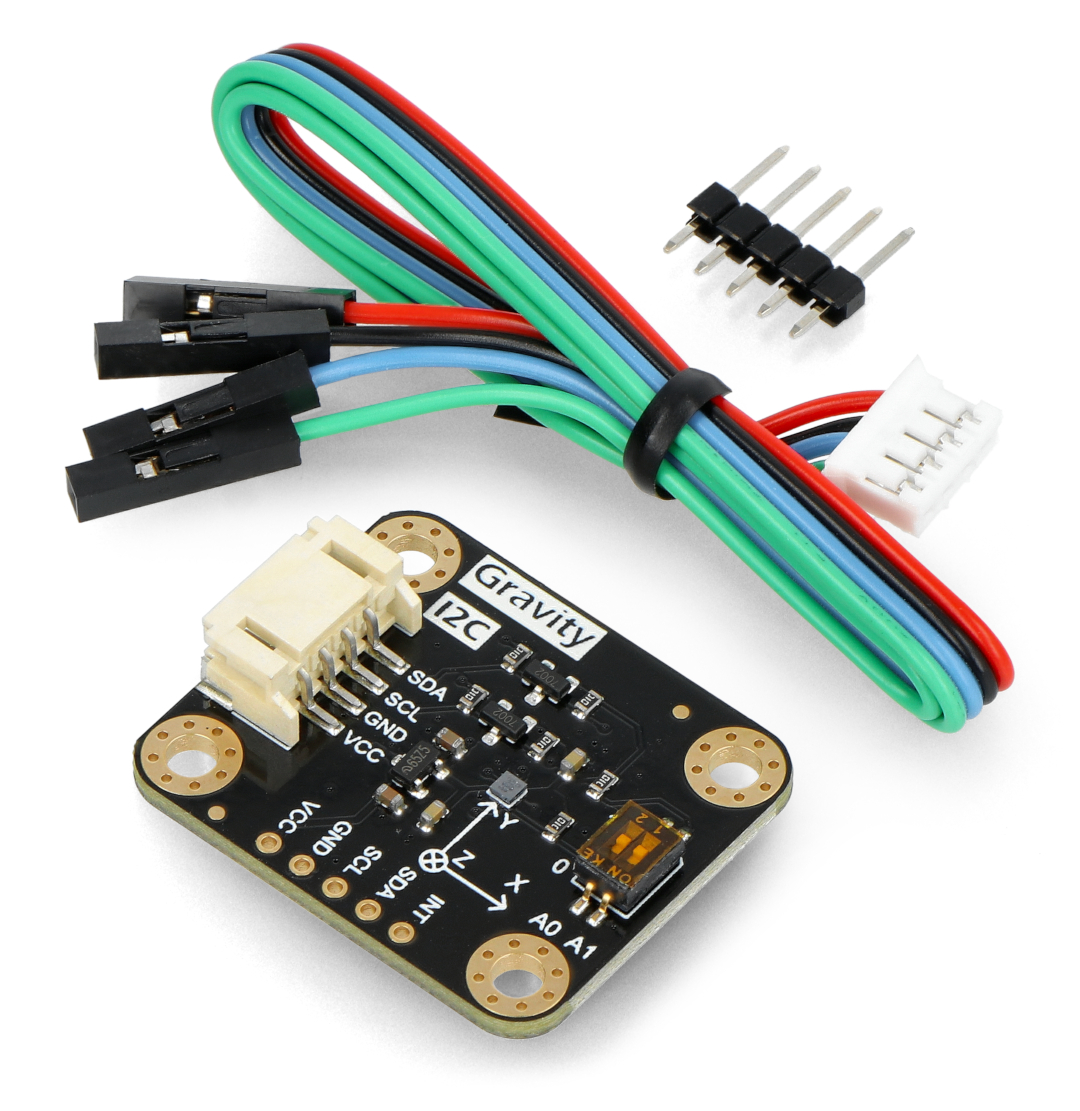
Zawartość zestawu.
| Klasyfikacja GPSR | Komponent |
| Szerokość opakowania | 5.5 cm |
| Wysokość opakowania | 6 cm |
| Głębokość opakowania | 2.5 cm |
| Masa opakowania | 0.014 kg |
Jako pierwszy zadaj pytanie dotyczące tego produktu!

Kraj pochodzenia: Chiny
Dane kontaktowe producenta: Zhiwei Robotics Corp. Unit 01, 26/F, A1 Shanghai T & I Tower, No. 1699 Zhongke Road, Pudong District, Shanghai, P.R.China [email protected]
Dane kontaktowe wprowadzającego na rynek UE: BOTLAND B. DERKACZ SP. K. Gola 25A - 63-640 Bralin [email protected]
Informacja o produkcie
Produkt jest komponentem przeznaczonym do dalszego montażu/prototypowania. Nie stanowi on samodzielnego wyrobu gotowego w rozumieniu przepisów o bezpieczeństwie produktów.