- Nowość!
- Darmowa dostawa




Filament AURAPOL PLA Semi-Transparent 1,75mm 1kg - Fuchsia Dream


Air Assist - pompa powietrza do plotera laserowego TOOCAA L2

Przycisk bezpieczeństwa do drukarki 3D Snapmaker 2.0

xTool F1 Ultra 2w1 - światłowodowa i diodowa grawerka laserowa 20W



Moduł z gniazdem microUSB - złącze do płytki stykowej - PiHut 106577


Żyroskop - W celu określenia współrzędnych i orientacji obiektu, często używane są urządzenia czujnikowe. Do takich urządzeń zaliczane są żyroskopy, akcelerometry i magnetometry. Mimo podobnego obszaru zastosowań, każde z nich mierzy inne wielkości. Łącząc je w jedno urządzenie, otrzymujesz potężne narzędzie ułatwiające określenie lokalizacji i kierunku ruchu np. drona lub robota. Odpowiednio zaprojektowany układ elektroniczny realizujący te funkcje również w Twoim projekcie, znajdziesz w wielu wariantach w ofercie sklepu Botland.

Gravity - BMI160 6DoF IMU - 3-osiowy akcelerometr i żyroskop - DFRobot SEN0250
6-osiowy inercyjny czujnik ruchu wyposażony w układ MEMS Bosch BMI160 . Moduł integruje w sobie 16 bitowy 3-osiowy akcelerometr i 3-osiowy żyroskop . Jest stosowany do...
MPU-6050 3-osiowy akcelerometr i żyroskop I2C - moduł DFRobot
Czujnik do pomiaru przyspieszeń oraz prędkości kątowej w trzech osiach. Jest połączeniem 3-osiowego akcelerometru i żyroskopu. Charakteryzuje się prostą obsługą, komunikuje...
6-osiowy czujnik ruchu - akcelerometr i żyroskop - DFRobot SEN0386
Wydajny 6-osiowy czujnik łączący w sobie akcelerometr i żyroskop. Pozwala określić położenie obiektu w przestrzeni , zmierzyć prędkość przyśpieszenia oraz prędkość kątową...
Grove - 6-osiowy akcelerometr i żyroskop LSM6DS3 - Seeedstudio 105020012
Moduł wyposażony w 6-osiowy akcelerometr i żyroskop oparty o układ LSM6DS3 z wbudowanym regulatorem zasilania. Pozwala na pomiar 6 wielkości: przyspieszenia X, Y, Z oraz...
Czujnik środowiskowy I2C - do Raspberry Pi Pico - Waveshare 20232
Moduł przeznaczony do Raspberry Pi Pico wyposażony w całą gamę przydatnych czujników środowiskowych . Wyprodukowany przez Waveshare, zawiera w sobie czujnik temperatury,...
Grove - 3-osiowy akcelerometr, żyroskop i magnetometr - ICM20600+AK09918 - I2C
Moduł serii Grove służący do 9-stopniowej nawigacji inercyjnej (IMU). Pełni on rolę żyroskopu, akcelerometru i elektronicznego kompasu. Pozwala na pomiar obrotu kątowego...
ISM330DHCX 6DoF IMU - 3-osiowy akcelerometr i żyroskop - Adafruit 4502
Czujnik DoF ISM330DHCX wyposażony w 3-osiowy akcelerometr oraz 3-osiowy żyroskop. Służy do pomiaru przyspieszenia liniowego w zakresach ± 2 / ± 4 / ± 8 / ± 16 g oraz...
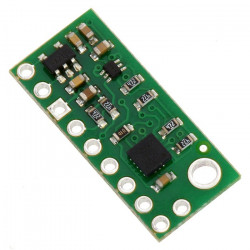
MinIMU-9 v6 - moduł z akcelerometrem i magnetometrem - LSM6DSO i LIS3MDL - Pololu 2862
MinIMU-9 v6 to jednostka pomiarowa (IMU), która zawiera 3-osiowy żyroskop , akcelerometr LSM6DSO oraz magnetometr LIS3MDL. Wszystkie te elementy umieszczone zostały na...
LSM6DS33 - 3-osiowy akcelerometr i żyroskop I2C/SPI - Pololu 2736
Czujnik pozwala na pomiar 6 wielkości: przyspieszenia X, Y, Z oraz prędkości kątowej X, Y, Z. Jest połączeniem 3-osiowego akcelerometru i żyroskopu. Komunikuje się poprzez...
LSM9DS1 9DoF IMU - 3-osiowy akcelerometr, żyroskop i magnetometr I2C/SPI - Adafruit 3387
Czujnik jest połączeniem 3-osiowego cyfrowego żyroskopu, akcelerometru i kompasu. Pozwala na pomiar przyspieszeń, pola magnetycznego oraz prędkości kątowej w konfigurowalnych...
LSM6DSO32 6DoF IMU - 3-osiowy akcelerometr i żyroskop - Adafruit 4692
Czujnik 6 DoF LSM6DSO32 to moduł 3-osiowego akcelerometru i 3-osiowego żyroskopu firmy Adafruit. Jest stosowany do pomiaru przyśpieszenia liniowego w zakresach ± 4...
L3GD20H 3-osiowy, cyfrowy żyroskop I2C SPI - Pololu 2129
Czujnik do pomiaru prędkości kątowej w trzech osiach. Działa w zakresie: do ±240 °/s, ±500 °/s lub ±2000 °/s. Komunikuje się poprzez magistralę I2C lub SPI, posiada...
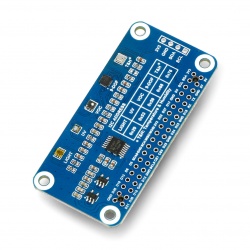
Czujnik środowiskowy - nakładka do Raspberry Pi - Waveshare 20471
Czujnik środowiskowy w postaci nakładki do Raspberry Pi wyposażony w szereg przydatnych sensorów. Posiada wbudowany czujnik temperatury , wilgotności , ciśnienia...
BNO085 9-DOF IMU Fusion Breakout - 3-osiowy akcelerometr, żyroskop i magnetometr - Adafruit 4754
Czujnik oparty na układzie BNO085 wyposażony w akcelerometr, magnetometr oraz żyroskop. Umożliwia pomiar przyspieszenia, orientacji przestrzennej, a także tego skąd pochodzi...
SparkFun 6DoF IMU Breakout - BMI270 - 3-osiowy akcelerometr i żyroskop - Qwiic - SparkFun SEN-22397
SparkFun 6DoF IMU Breakout to moduł czujnika inercyjnego z układem BMI270 . Posiada 3-osiowy akcelerometr i żyroskop, które umożliwiają precyzyjne śledzenie ruchu i...
Fermion - akcelerometr i żyroskop ICG-20660L - I2C/SPI - DFRobot SEN0443
Moduł wyposażony w 6-osiowy układ IMU ICG-20660L o wysokiej precyzji, który integruje w sobie 3-osiowy akcelerometr (± 2 / 4 / 8 / 16 g) oraz 3-osiowy żyroskop (± 125 /...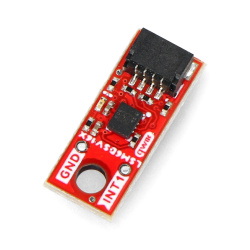

LSM6DSO - 3-osiowy akcelerometr i żyroskop I2C/SPI - SparkFun SEN-18020
Płytka z układem 6DoF LSM6DSO zawierającym akcelerometr oraz żyroskop wraz z buforem FIFO 9 kB i funkcjami przerwania przetwarzania wbudowanego. Urządzenie pozwala wykryć...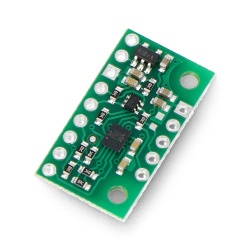
LSM6DSO - 3-osiowy akcelerometr i żyroskop I2C/I3C/SPI - Pololu 2798
Czujnik LSMDDSO od Pololu jest następcą starszego modułu LSM6DS33 i stanowi połączeniem 3-osiowego akcelerometru oraz żyroskopu. Pozwala na pomiar 6 wielkości:...
SparkFun Micro 6DoF IMU - BMI270 - 3-osiowy akcelerometr i żyroskop - Qwiic - SparkFun SEN-22398
SparkFun Micro 6DoF IMU Breakout to kompaktowa płytka, wyposażona w akcelerometr i żyroskop , które służą do precyzyjnego śledzenia ruchu i orientacji. Moduł zawiera...
MinIMU-9 v5 9DOF - akcelerometr, żyroskop i magnetometr I2C - Pololu 2738
Czujnik pozwala na pomiar 9 wielkości: przyspieszenia X, Y, Z, pola magnetycznego X, Y, Z oraz prędkości kątowej X, Y, Z. Jest połączeniem 3-osiowego akcelerometru i żyroskopu...Zobacz również
Żyroskopy są przyrządami, których zadaniem jest pomiar i utrzymanie położenia kątowego obiektu. Żyroskopy najczęściej są używane w takich obiektach, które zwykle nie obracają się zbyt szybko wokół własnej osi. Statki powietrzne, takie jak samoloty i helikoptery, zwykle obracają się o kilka stopni wokół własnej osi, np. podczas manewru skręcania lub zmiany wysokości (z wyłączeniem lotów akrobacyjnych). Wykrywając te niewielkie odchylenia, żyroskopy pomagają w stabilizacji lotu statku powietrznego, ale zmiana przyspieszenia bądź prędkości liniowej statku, nie wpływają na pomiar odchylenia kątowego maszyny. Żyroskopy zbudowane w technologii MEMS, umożliwiają pomiar prędkości kątowej i zajmują niewiele miejsca. Takie żyroskopy mogą być użyte do wyznaczenia orientacji obiektu i z powodzeniem znajdują zastosowanie w autonomicznych systemach nawigacji w ruchu lądowym i powietrznym, w tym w przestrzeni kosmicznej pozaziemskiej. Jak najprościej można wykorzystać żyroskop? Wyobraź sobie koło roweru obracające się z prędkością jednego obrotu w ciągu sekundy. Jest to równoznaczne ze stwierdzeniem, że obraca się ono z prędkością kątową wynoszącą 360 stopni w ciągu sekundy. Jak z kolei sprawdzić kierunek obrotów koła metodą pomiarową? Właśnie za pomocą żyroskopu MEMS umożliwiającego trójwymiarowy pomiar kąta obrotu - wokół osi X, Y i Z. Można spotkać również żyroskopy umożliwiające pomiar w jednej lub dwóch osiach, ale to właśnie żyroskopy trójosiowe w postaci małej płytki z elektroniką okazały się rozwiązaniem cechującym się niską ceną i jednocześnie wysoką popularnością wśród majsterkowiczów. Żyroskop to sprzęt z którym powinien zapoznać się każdy majsterkowicz i początkujący elektronik.
Jeśli chcesz rozwinąć swój projekt robota pod kątem jego stabilności równowagi podczas zatrzymywania się, poruszania się czy stania w bezruchu na nierównej powierzchni, to znakomitym rozwiązaniem będzie zastosowanie małego żyroskopu MEMS, który mierząc odchylenie kątowe robota od położenia równowagi, nada informację do Arduino, które sterując odpowiednimi silnikami i serwomechanizmami, nada właściwą pozycję robota, zapobiegając jego niepożądanemu przewróceniu się. Jak działa żyroskop MEMS? Czujnik wbudowany w tych urządzeniach ma wymiary nieprzekraczające średnicy ludzkiego włosa i działa w oparciu o zjawisko rezonansu mechanicznego. Gdy żyroskop zostaje obrócony, czujnik MEMS zamienia ten ruch na sygnał napięcia o bardzo niskim poziomie, proporcjonalnie do kąta obrócenia. Następnie, sygnał ten jest wzmacniany i przekazywany do mikrokontrolera, gdzie za pośrednictwem programu podejmowane są dalsze decyzje w zależności od odczytanej wartości napięcia.
Akcelerometry to urządzenia, których zadaniem jest pomiar przyspieszenia – wielkości opisującej jak szybko zmienia się prędkość obiektu w czasie. Akcelerometry są pomocnymi narzędziami w systemach pomiarowych do wykrywania wibracji obiektu badanego oraz w systemach nawigacji. Akcelerometr wykrywa statyczne i dynamiczne oddziaływanie przyspieszenia. Siły statyczne obejmują oddziaływanie grawitacyjne, zaś dynamiczne – wibracje i przemieszczanie. Akcelerometry mogą mierzyć przyspieszenie w jednej, dwóch, lub trzech osiach układu współrzędnych, ale podobnie jak w przypadku żyroskopów, rozwiązanie trójosiowe jest przodujące. W skład budowy typowego akcelerometru, wchodzą mikroskopijnych rozmiarów elektrody tworzące kondensator zawieszone na sprężynach. Pod wpływem przyspieszenia, elektrody poruszają się względem siebie zmieniając pojemność między sobą – prędkość tych zmian umożliwia wyznaczenie przyspieszenia obiektu, na którym akcelerometr pracuje. Występują także akcelerometry piezoelektryczne, w których odpowiedni materiał pod wpływem oddziaływania mechanicznego, wytwarza ładunek elektryczny na swojej powierzchni – zjawisko to, wykorzystywane jest m.in. podczas wykonywania pomiarów sejsmicznych.
Pośród czujników MEMS oferowanych przez sklep Botland, znajdziesz urządzenia z wbudowanym żyroskopem, akcelerometrem, a także magnetometrem - urządzeniem służącym do pomiaru natężenia pola magnetycznego, najczęściej na zasadzie efektu Halla lub zjawiska magnetorezystancji. W magnetometrze Halla, jeśli do metalowej płyty podłączymy źródło napięcia, to wywołamy przepływ prądu między dwiema powierzchniami tej płyty. Gdy do zasilanej płyty zbliżymy źródło pola magnetycznego (np. magnes), to spowodujemy zniekształcenie drogi przepływu elektronów na powierzchni płyty. Wówczas, jedną stronę płyty zajmą elektrony, a drugą – protony. Po podłączeniu woltomierza między obie powierzchnie płyty, będziemy mogli odczytać napięcie, którego wartość zależy od natężenia pola magnetycznego i jego kierunku oddziaływania w przestrzeni. Natomiast koncepcja magnetorezystancyjna magnetometru wykorzystuje materiały wrażliwe na pole magnetyczne – często spotykany jest stop żelaza i niklu. Takie materiały pod wpływem wystawienia na działanie pola magnetycznego zmieniają swoją rezystancję. Czujniki MEMS dostępne w naszej ofercie są ponadto wyposażone w interfejs I2C, dzięki któremu bez problemu będziesz mógł podłączyć swój żyroskop do współpracy np. Arduino czy Raspberry Pi.
Czujniki żyroskopowe stosowane w określaniu współrzędnych i orientacji, znane również jako czujniki prędkości kątowej, to urządzenia wykrywające prędkość kątową. Mówiąc najprościej prędkość kątowa to zmiana kąta obrotu w jednostce czasu wyrażana zwykle w stopniach na sekundę.
Żyroskopy są stosowane w pojazdowych systemach nawigacji, elektronicznych systemach kontroli stabilności pojazdów, czujnikach ruchu w grach mobilnych, systemach wykrywania drgań kamery w aparatach cyfrowych, helikopterach sterowanych radiowo i w szeroko rozumianej robotyce i mechanice.