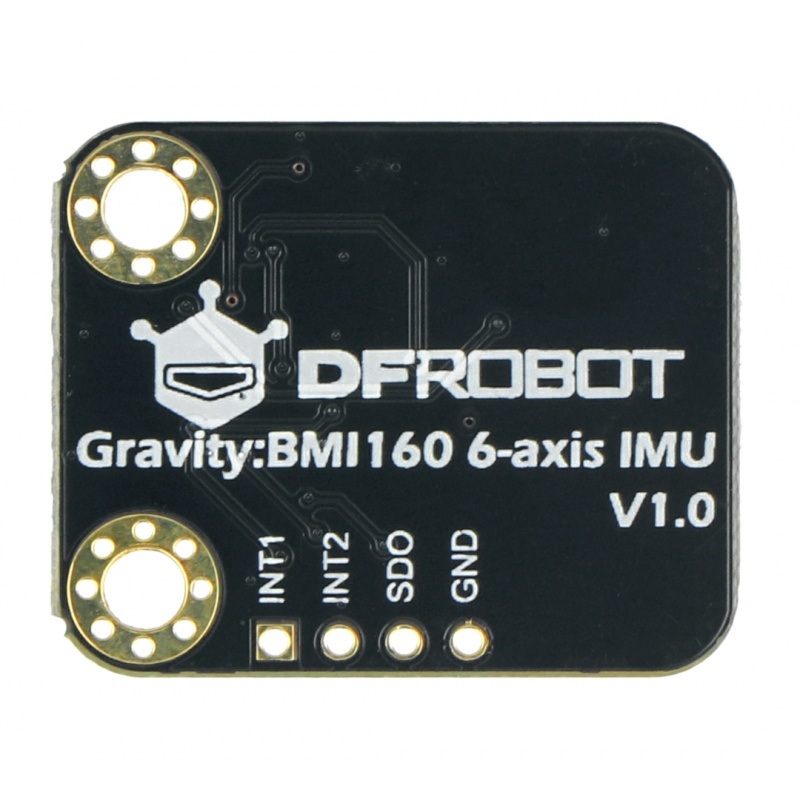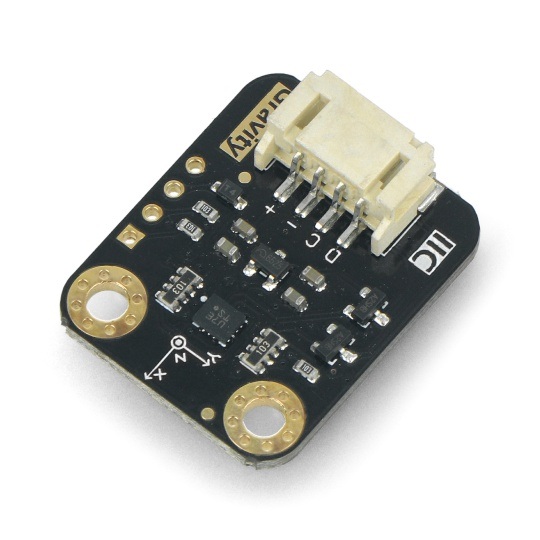





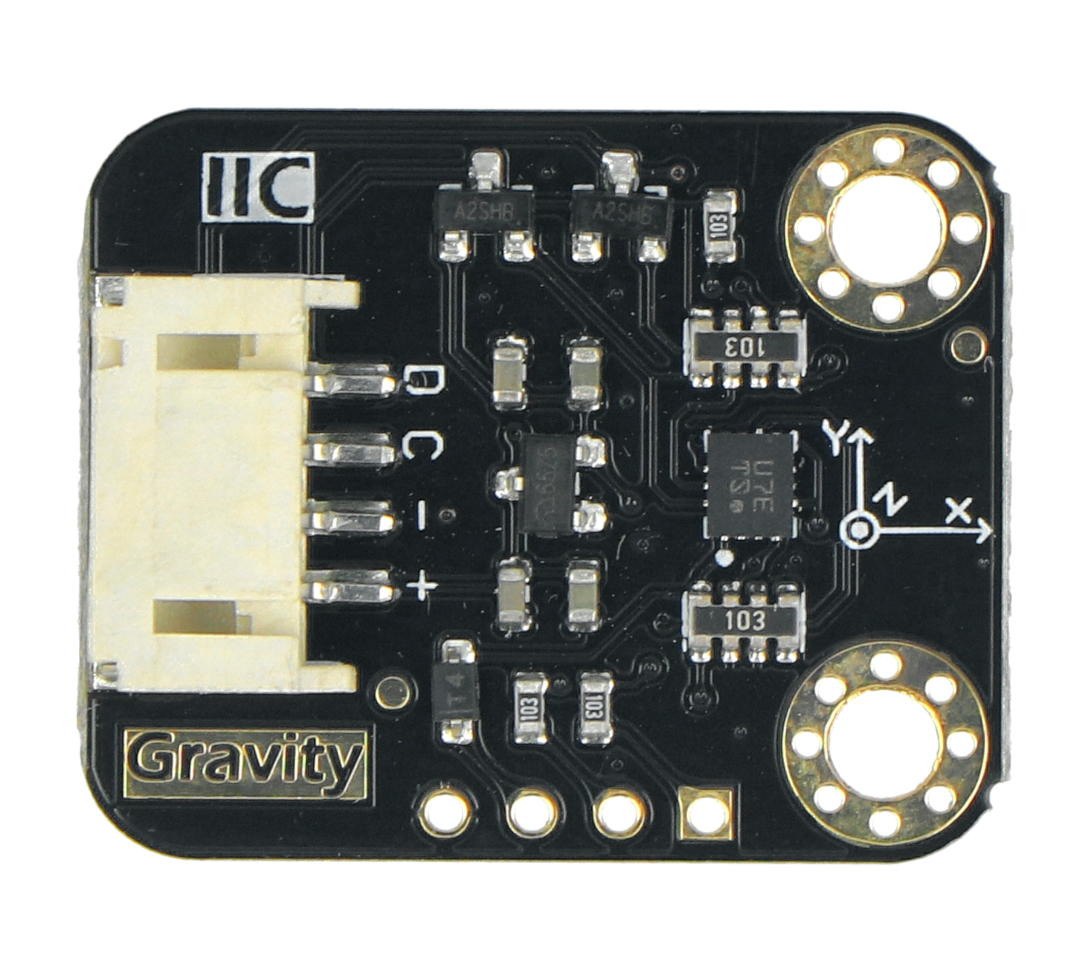
6-osiowy inercyjny czujnik wyposażony w układ MEMS Bosch BMI160. Moduł integruje w sobie 16 bitowy 3-osiowy akcelerometr i 3-osiowy żyroskop. Jest stosowany do pomiaru przyśpieszenia liniowego w zakresach ± 2 g / ± 4 g / ± 8 g / ± 16 g oraz pomiaru prędkości kątowej w zakresie ± 125 dps / ± 250 dps / ±500dps / ± 1000 dps / ± 2000 dps. Charakteryzuje się niewielkim poborem mocy i wysoką dokładnością odczytu. Znajduje zastosowanie jako element dodatkowy do smartfonów, tabletów i innych urządzeń przenośnych. Może być wykorzystywany do zliczania kroków, jako rejestrator podczas biegania i innych ćwiczeń. Posiada wbudowany układ zarządzania energią LDO, pracuje z napięciem w zakresie od 3,2 V do 6 V. Wykorzystuje magistralę I2C do komuniakacji z modułem kontrolera.
6-osiowy czujnik ruchu IMU od DFRobot.
Produkt kompatybilny z Arduino
Producent przygotował szczegółowy przewodnik użytkownika, który znacząco ułatwia rozpoczęcie pracy z modułem. Zawiera instrukcję podłączenia modułu z kontrolerem, bibliotekę dla środowiska Arduino IDE oraz przykładowy kod programu.
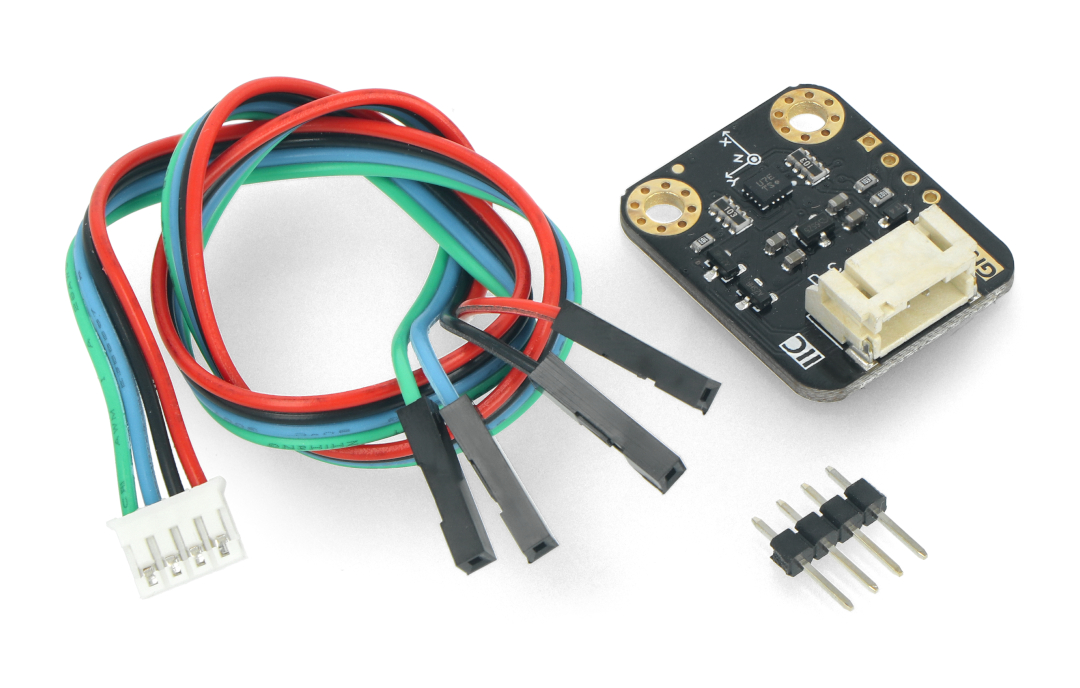
W skład zestawu wchodzi także przewód połączeniowy oraz listwa goldpin.
Moduł czujnika może być połączony z kontrolerem na dwa sposoby: za pomocą złącza Gravity lub pól lutowniczych. Zestaw zawiera elementy montażowe i połączeniowe do każdej z opcji. Należy połączyć elementy według poniższych zależności:

Schemat połączenia modułu z płytką DFRduino, będącej odpowiednikiem Arduino. Płytka nie wchodzi w skład zestawu, można ją nabyć osobno w naszym sklepie.
Moduł wyposażony w układ BMI160.
| Napięcie zasil. od | 3.2 V |
| Napięcie zasil. do | 6.0 V |
| Interfejs | I2C |
| Moduł - typ | Żyroskop |
| Moduł - typ | Akcelerometr |
| Klasyfikacja GPSR | Komponent |
| Szerokość opakowania | 5.6 cm |
| Wysokość opakowania | 6.2 cm |
| Głębokość opakowania | 2.5 cm |
| Masa opakowania | 0.013 kg |
Jako pierwszy zadaj pytanie dotyczące tego produktu!

Informacja o produkcie
Produkt jest komponentem przeznaczonym do dalszego montażu/prototypowania. Nie stanowi on samodzielnego wyrobu gotowego w rozumieniu przepisów o bezpieczeństwie produktów.
Dane GPSR
Kraj pochodzenia: Chiny
Dane kontaktowe producenta: Zhiwei Robotics Corp. Unit 01, 26/F, A1 Shanghai T & I Tower, No. 1699 Zhongke Road, Pudong District, Shanghai, P.R.China [email protected]
Dane kontaktowe wprowadzającego na rynek UE: BOTLAND B. DERKACZ SP. K. Gola 25A - 63-640 Bralin [email protected]