














































































































































































































































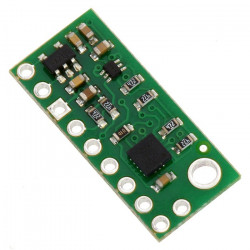

































































































































Jednokanałowy wydajny sterownik silnika prądu stałego DC. Ciągły prąd na kanał wynosi 21 A (chwilowy nawet do 100 A), napięcie zasilanie silników od 6,5 V do 40 V, napięcie części logicznej od 1,8 V do 5,5 V. Urządzenie posiada także czujnik przepływu prądu oraz możliwość ograniczenia prądu silnika.
Moduł pozwala kontrolować jeden silnik prądu stałego. Silnik może być zasilany napięciem od 6,5 do 40 V przy ciągłym poborze prądu do 21 A, chwilowym (przez 10 ms) do 100 A. Prędkość można kontrolować poprzez sygnał PWM, kierunek za pomocą wyprowadzenia cyfrowego DIR - podając stan niski (logiczne 0) lub wysoki (logiczna 1). Urządzenie posiada także czujnik przepływu prądu oraz możliwość ograniczenia prądu silnika.
|
W przypadku korzystania z baterii w przypadku pełnego naładowania realne napięcie może być znacznie wyższe od nominalnego. Dlatego też producent zaleca korzystanie z baterii o nominalnym napięciu wyjściowym do 28 V. |
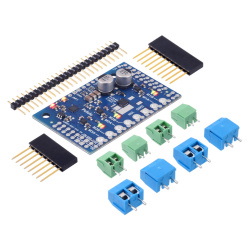
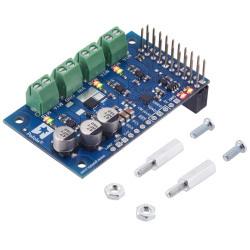
 W zestawie znajduje się sterownik oraz złącza do samodzielnego lutowania.
W zestawie znajduje się sterownik oraz złącza do samodzielnego lutowania.
Do poprawnego działania modułu należy doprowadzić zasilanie silników pomiędzy piny VIN a GND oraz podłączyć wyprowadzenia odpowiedzialne za ruch silnika, których opis znajduje się w tabeli poniżej.
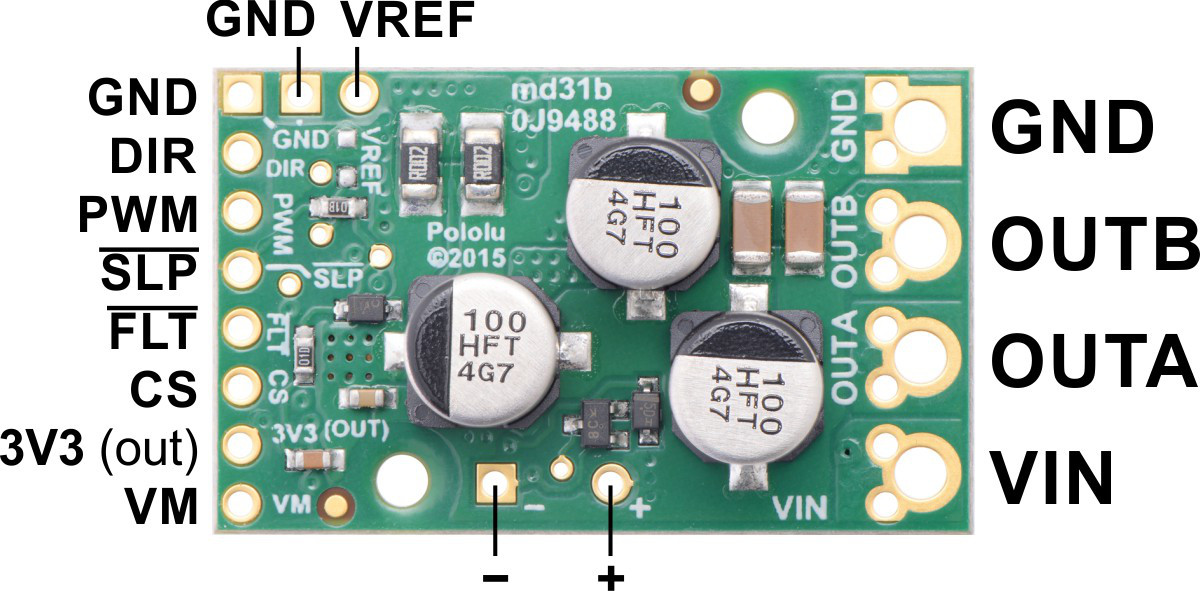
| PIN | Opis |
|---|---|
| VIN | Napięcie zasilania silników z zakresu od 6,5 V do 40 V |
| VM | Wyjście zasilania za zabezpieczeniem przeciw odwrotnemu podłączeniu. |
| +/- | Wyprowadzanie umożliwiające wlutowanie dodatkowego kondensatora na liniach zasilania silnika. |
| 3V3 (OUT) | Napięcie wyjściowe z regulatora napięcia 3,3 V, o wydajności prądowej kilku mA. Może być używane jako napięcie referencyjne dla innych układów. Należy zwrócić szczególną uwagę, aby nie doprowadzić do zwarcia sąsiednimi pinami. |
| GND | Masa układu |
|
OUTA OUTB |
Wyjścia do podłączenia silnika prądu stałego. |
| PWM | Wejście sterujące prędkością obrotową do podłączenia sygnału PWM. Domyślnie w stanie niskim |
| DIR | Wejście cyfrowe sterujące kierunkiem obrotów silnika. Domyślnie w stanie niskim. |
| SLP | Podanie stanu niskiego powoduje przejście układu w stan czuwania. Domyślnie wyprowadzenie jest w stanie wysokim - układ załączony. |
| FLT | Wyjście typu open-drain informujące o wystąpieniu usterki. Pojawianie się stanu niskiego oznacza usterkę układu. |
| CS | Wyjście czujnika prądu o rozdzielczości 20 mV/A z offsetem 50 mA. |
| VREF | Wejście napięcia referencyjnego. Należy dołączyć rezystor do masy w celu ograniczenia maksymalnego prądu wyjściowego. Bez dodatkowego rezystora wartość maksymalna wynosi 50 A. |
W tabeli zostały przedstawione zależności wyjść od sygnałów wejściowych:
H - stan wysoki
L - stan niski
X - bez znaczenia
|
PWM |
DIR |
OUTA | OUTB | Stan silnika |
|---|---|---|---|---|
|
% |
H | H | L |
Silnik kręci się zgodnie ze wskazówkami zegara z prędkością % PWM. |
|
% |
L | L | H |
Silnik kręci się odwrotnie do wskazówek zegara z prędkością % PWM |
|
L |
X | L | L | Hamowanie. |
Częstotliwość sygnału PWM powinna wynosić do 100 kHz, typowo wykorzystuje się 20 kHz. Prędkość obrotowa jest proporcjonalna do wypełnienia sygnału PWM. Dodatkowo układ posiada pin VREF, który umożliwia ograniczenie płynącego prądu. Domyślnie wartość jest ograniczona do 50 A, w zmiany należy podłączyć rezystor pomiędzy VREF a masę. Zależność rezystancji została przedstawiona na wykresie.
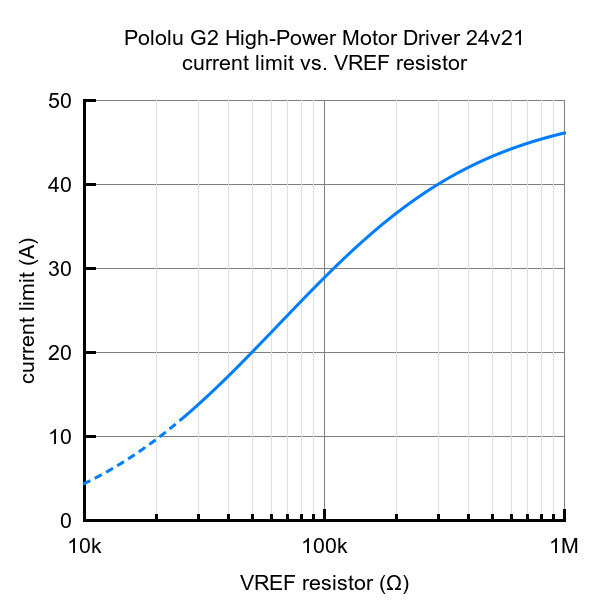
Prąd silników w zależności od rezystancji podłączonej pomiędzy pin VREF a masę.
Sterownik może wykryć różne błędy sygnalizowane przez ustawienie pinu FLT w stan niski. W celu wykorzystania należy go podpiąć do stanu wysokiego (napięcia logiki układu). Wykryte może zostać zwarcie na wyjściach, zbyt niskie napięcie oraz przegrzanie. Wszystkie błędy wyłączają wyjścia silnika, lecz nie blokują ich, to oznacza, że sterownik będzie próbował wznowić działanie po ustąpieniu błędu.
Sterownik potrafi obsłużyć duże skoki prądu przez krótki czas (100 A przez kilka milisekund). Przy ciągłej pracy wytrzymuje 21 A, lecz jest to uzależnione od warunków zewnętrznych, takich jak temperatura otoczenia i chłodzenia silnika. Do płytki można dołożyć radiator w celu polepszenia wydajności.
Sterownik nie posiada automatycznego wyłączenia w przypadku przegrzania. Należy zachować ostrożność w celu uniknięcia uszkodzenia układu.
Film opisujący działanie mostka H - sterownika silników prądu stałego.
| Nazwa |
Napięcie zasilania |
Prąd ciągły |
|---|---|---|
| G2 High-Power 18v25 | 30 V | 25 A |
| G2 High-Power 18v17 | 30 V | 17 A |
| G2 High-Power 24v21 | 40 V | 21 A |
| G2 High-Power 24v13 | 40 V | 13 A |
Przydatne linki |
| Napięcie zasil. od | 6.5 V |
| Napięcie zasil. do | 40.0 V |
| Wydajność prąd | 21.0 A |
| Ilość kanałów | 1 |
| Szerokość opakowania | 8 cm |
| Wysokość opakowania | 1 cm |
| Głębokość opakowania | 10 cm |
| Masa opakowania | 0.01 kg |
Jako pierwszy zadaj pytanie dotyczące tego produktu!
Kraj pochodzenia: Stany Zjednoczone
Dane kontaktowe producenta: Pololu Corporation 920 Pilot Rd. Las Vegas, NV 89119 USA [email protected]
Dane kontaktowe wprowadzającego na rynek UE: BOTLAND B. DERKACZ SP. K. Gola 25A - 63-640 Bralin










