Unitree G1 Edu U9 to zaawansowany robot humanoidalny AI przeznaczony do badań nad manipulacją, percepcją dotykową oraz interakcją człowiek-robot. Konstrukcja wyposażona w 37 stopni swobody, dwie trójpalczaste dłonie Dex3-1 z czujnikami dotykowymi, kamerę głębi oraz skaner 3D LiDAR umożliwia realizację precyzyjnych operacji manipulacyjnych i analizę kontaktu z obiektami. Platforma oferuje wysoką moc obliczeniową, wsparcie AI oraz szerokie możliwości programowania i rozwoju algorytmów robotycznych.
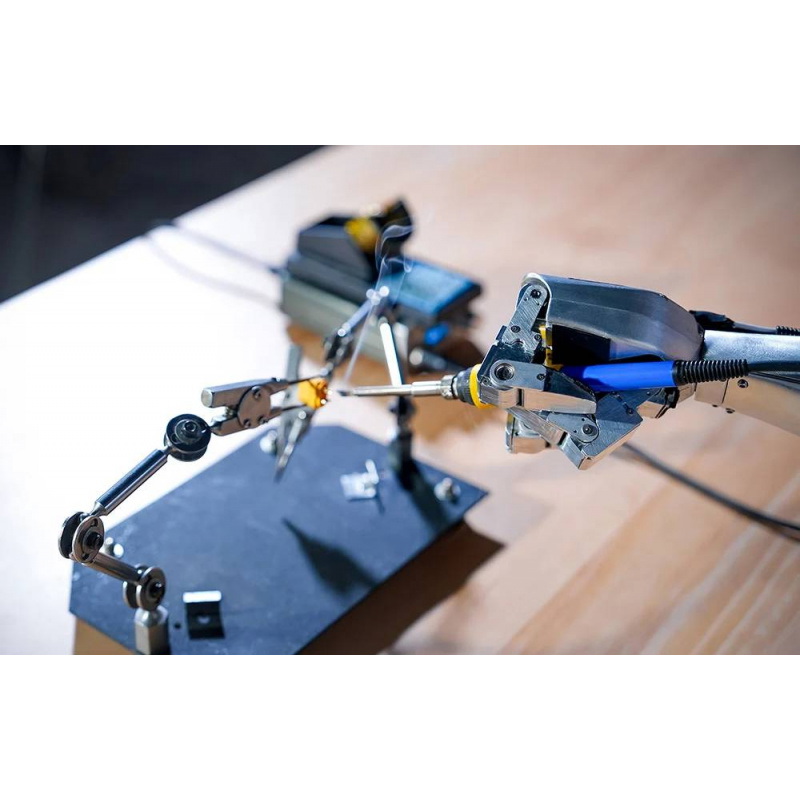
Unitree G1 Edu U9 to profesjonalna platforma humanoidalna opracowana z myślą o laboratoriach badawczych, uczelniach technicznych oraz zespołach rozwijających nowoczesne systemy sztucznej inteligencji i robotyki humanoidalnej. Robot łączy zaawansowaną mechanikę, wysoką moc obliczeniową oraz rozbudowany system percepcji umożliwiający realizację złożonych zadań manipulacyjnych i badawczych. Model Edu U9 bazuje na platformie G1 Edu Standard Edition i został wyposażony w dwie trójpalczaste dłonie Dex3-1 sterowane siłowo z zaawansowanym systemem czujników dotykowych. Każda dłoń posiada 33 sensory dotykowe, które umożliwiają analizę kontaktu z obiektem, kontrolę siły chwytu oraz precyzyjną manipulację przedmiotami o różnych kształtach i strukturach. Konstrukcja oferuje łącznie 37 stopni swobody, co pozwala realizować płynne ruchy humanoidalne i złożone operacje manipulacyjne. Robot wykorzystuje kamerę głębi oraz skaner 3D LiDAR do percepcji otoczenia, obsługuje WiFi 6 i Bluetooth 5.2, a inteligentny akumulator o pojemności 9000 mAh zapewnia około 2 godzin pracy. Maksymalny moment obrotowy stawu kolanowego wynosi 120 N*m, natomiast ramię może przenosić obiekty o masie do około 3 kg. Za przetwarzanie AI odpowiada wydajny 8-rdzeniowy procesor oraz platforma Nvidia Jetson Orin oferująca moc obliczeniową do 100 TOPS.

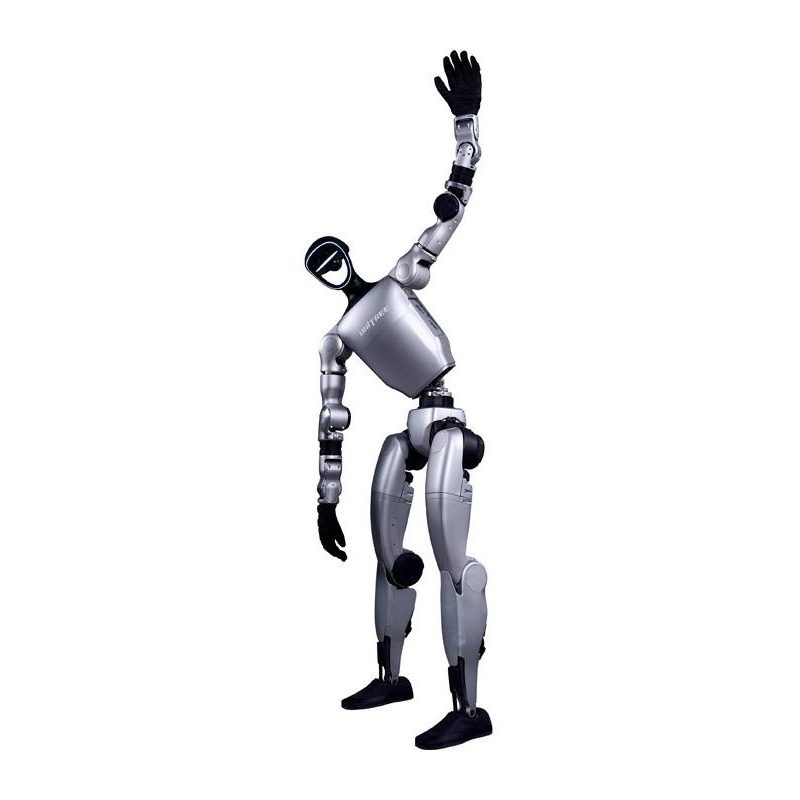
Robot humanoidalny - Unitree G1 Edu U9.
G1 Edu wyposażony jest w system 3D LiDAR Livox MID-360 oraz kamerę głębi Intel RealSense.
Unitree G1 Edu U9 wykorzystuje zaawansowaną konstrukcję humanoidalną oferującą aż 37 stopni swobody, co pozwala realizować naturalne ruchy całego ciała oraz bardzo złożone operacje manipulacyjne. Robot może płynnie chodzić, utrzymywać równowagę, obracać tułów oraz wykonywać dynamiczne ruchy kończyn. Konstrukcja obejmuje wieloosiowe ramiona i tułów oraz trójpalczaste dłonie Dex3-1 umożliwiające realizację precyzyjnych ruchów chwytających i manipulacyjnych. Dzięki sterowaniu siłowemu i czujnikom dotykowym robot może analizować kontakt z obiektem oraz dynamicznie dostosowywać siłę chwytu. Za dynamikę i precyzję odpowiadają niskoinercyjne silniki PMSM oraz przemysłowe łożyska krzyżowe o wysokiej trwałości i nośności. Konstrukcja została zoptymalizowana pod kątem badań nad autonomiczną manipulacją i interakcją fizyczną z otoczeniem.
Model posiada 37 stopni swobody i wyposażony jest w dwie dłonie z trzema palcami.
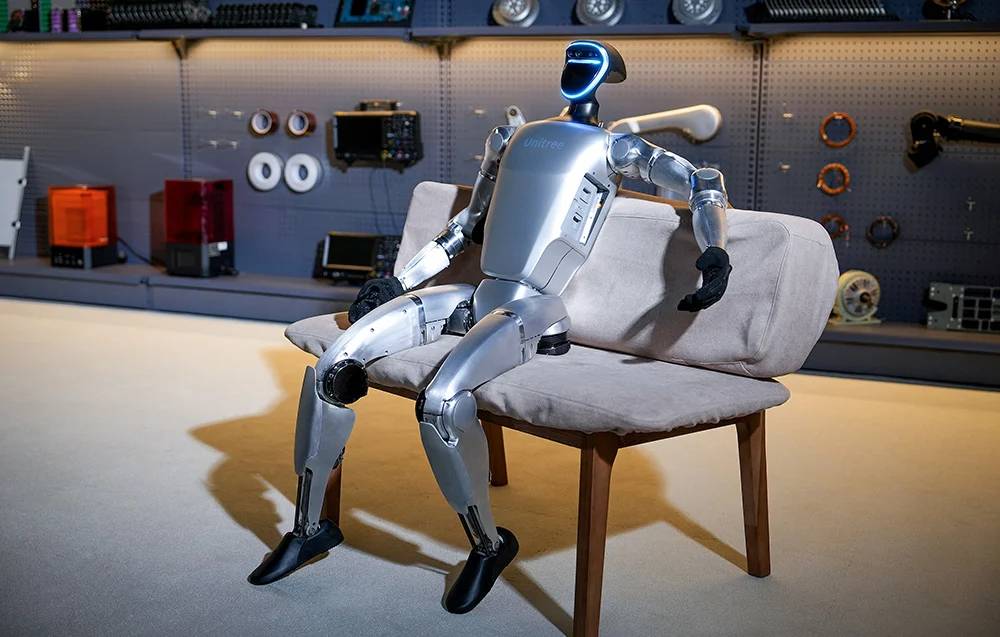
Konstrukcja robota inspirowana jest anatomią człowieka, co przekłada się na naturalny sposób poruszania i wysoką stabilność.
Robot został wyposażony w rozbudowany system percepcji obejmujący kamerę głębi oraz skaner 3D LiDAR umożliwiające mapowanie przestrzeni, analizę otoczenia oraz wykrywanie przeszkód w czasie rzeczywistym. Platforma może być wykorzystywana do badań nad autonomią, widzeniem maszynowym i inteligentną nawigacją. Kluczowym elementem modelu U9 są trójpalczaste dłonie Dex3-1 wyposażone w 33 sensory dotykowe na każdej dłoni. System umożliwia analizę siły kontaktu, nacisku oraz interakcji z obiektem, co znacząco zwiększa możliwości manipulacyjne robota i bezpieczeństwo pracy z delikatnymi elementami. System audio obejmuje matrycę 4 mikrofonów oraz głośnik 5 W umożliwiające komunikację głosową i integrację z systemami AI wykorzystującymi rozpoznawanie mowy i interakcję człowiek-robot. Aplikacja Unitree Explore APP pozwala monitorować parametry pracy robota, przeprowadzać diagnostykę oraz wykonywać kalibrację przegubów.
Unitree G1 Edu U9 posiada kompaktową konstrukcję o wysokości 1320 mm i masie około 35 kg. Wydajne napędy zapewniają maksymalny moment obrotowy stawu kolanowego na poziomie 120 N*m, co umożliwia dynamiczny i stabilny ruch podczas realizacji zaawansowanych zadań manipulacyjnych. Robot może przenosić obiekty o masie do około 3 kg na ramię, zachowując wysoką precyzję sterowania. Inteligentny akumulator o pojemności 9000 mAh zapewnia około 2 godzin pracy, a system szybkiej wymiany pozwala ograniczyć przestoje podczas badań i eksperymentów.
Robot zasilany jest akumulatorem, który zapewnia około 2 godzin pracy.
Otwarta architektura wspiera Secondary Development, pozwalając na pełną kontrolę nad systemem.
Platforma G1 Edu została zaprojektowana jako otwarte środowisko badawcze wspierające rozwój własnych systemów AI, autonomii oraz sterowania humanoidalnego. Robot wykorzystuje 8-rdzeniowy procesor oraz platformę Nvidia Jetson Orin zapewniającą moc obliczeniową do 100 TOPS. Producent udostępnia dokumentację techniczną, API, przykłady implementacji oraz narzędzia developerskie umożliwiające rozwój aplikacji wysokopoziomowych i niskopoziomowych. Platforma wspiera badania nad sterowaniem, percepcją, planowaniem ruchu, manipulacją oraz interakcją haptyczną. Łączność WiFi 6 i Bluetooth 5.2 umożliwia integrację z komputerami, środowiskami laboratoryjnymi oraz zewnętrznymi systemami sterowania. Obsługa aktualizacji OTA pozwala wygodnie rozwijać funkcjonalność robota i aktualizować jego oprogramowanie.
| Specyfikacja techniczna UnitreeG1 Edu U9 | |
|---|---|
| Całkowita liczba stopni swobody | 37 |
| Stopnie swobody nogi | 6 |
| Stopnie swobody talii | 3 |
| Stopnie swobody ramienia | 5 |
| Stopnie swobody dłoni | 7 (opcjonalne sterowanie siłą dla trójpalczastej dłoni + 2 dodatkowe stopnie swobody nadgarstka) |
| Parametry dłoni Dex3-1 | kciuk: 3 aktywne stopnie swobody, palec wskazujący: 2 aktywne stopnie swobody, palec środkowy: 2 aktywne stopnie swobody |
| Opcjonalna instalacja czujników dotykowych | tak (w zestawie) |
| Łożyska stawów | przemysłowe krzyżowe łożyska rolkowe o wysokiej precyzji i dużej nośności |
| Silniki stawów | silniki synchroniczne z magnesami trwałymi PMSM z wewnętrznym wirnikiem o niskiej bezwładności |
| Maksymalny moment obrotowy stawu kolanowego | 120 N*m |
| Maksymalne obciążenie ramienia | około 3 kg |
| Długość łydki i uda | 0,6 m |
| Rozpiętość ramion | około 0,45 m |
| Zakres ruchu talii | Z ±155°, X ±45°, Y ±30° |
| Zakres ruchu kolana | od 0° do 165° |
| Zakres ruchu biodra | P ±154°, R od -30 do 170°, Y ±158° |
| Zakres ruchu nadgarstka | P ±92,5°, Y ±92,5° |
| Pełne wewnętrzne prowadzenie okablowania | tak |
| Enkoder stawów | podwójny enkoder |
| System chłodzenia | lokalne chłodzenie powietrzem |
| Typ akumulatora | 13-ogniwowy akumulator litowo-jonow |
| Podstawowa moc obliczeniowa | 8-rdzeniowy procesor wysokiej wydajności |
| Czujniki i komunikacja | kamera głębi + 3D LiDAR |
| 4-mikrofonowa matryca | tak |
| Głośnik | 5 W |
| Łączność bezprzewodowa | WiFi 6, Bluetooth 5.2 |
| Moduł wysokiej mocy obliczeniowej | Nvidia Jetson Orin |
| Akumulator szybkozłączny | tak |
| Pojemność akumulatora | 9000 mAh |
| Ładowarka | 54 V / 5 A |
| Kontroler manualny | tak |
| Czas pracy | około 2 godziny |
| Aktualizacje OTA | tak |
| Możliwość dalszego rozwoju | tak |
| Wymiary w pozycji stojącej | 1320 x 450 x 200 mm |
| Wymiary w pozycji złożonej | 690 x 450 x 300 mm |
| Masa z akumulatorem | ponad 35 kg |
| Porównanie wersji G1 Edu | ||||
|---|---|---|---|---|
| Model | DOF | Dłonie | Sensory dotykowe | |
| G1 Edu U1 | 23 | brak | nie | |
| G1 Edu U2 | 29 | brak | nie | |
| G1 Edu U3 | 43 | 2 x Dex3-1 | nie | |
| G1 Edu U4 | 43 | 2 x Dex3-1 | tak | |
| G1 Edu U5 | 41 | 2 x RH56DFQ | nie | |
| G1 Edu U9 | 41 | 2 x RH56DFTP | tak - 17 sensorów / dłoń | |
| G1 Edu U9 | 41 | 2 x Revo 2 Basic | nie | |
| G1 Edu U8 | 37 | 2 x Dex3-1 | nie | |
| G1 Edu U9 | 37 | 2 x Dex3-1 | tak - 33 sensory / dłoń | |
| G1 Edu U10 | 35 | 2 x Revo 2 Basic | nie | |
Przydatne linki |
| Klasyfikacja GPSR | Sprzęt |
Jako pierwszy zadaj pytanie dotyczące tego produktu!