









Unitree G1 Edu U1 to profesjonalny robot humanoidalny AI wyposażony w 23 stopnie swobody, wydajny moduł obliczeniowy 100 TOPS oraz system percepcji kamera głębi + 3D LiDAR. Oferuje moment obrotowy kolana do 120 N*m, udźwig ramienia do 3 kg oraz wsparcie dla programowania na poziomie low-level i high-level. To otwarta platforma do badań nad sztuczną inteligencją, lokomocją i interakcją człowiek-robot.
Unitree G1 Edu U1 to zaawansowany humanoidalny robot edukacyjny i badawczy, będący częścią profesjonalnej serii G1 Edu stworzonej dla naukowców, deweloperów i zespołów R&D. Platforma bazuje na sprawdzonej konstrukcji modelu G1, oferując jednocześnie pełną otwartość na rozwój oraz implementację własnych algorytmów sztucznej inteligencji. Robot posiada 23 stopni swobody, w tym 6 DoF na każdą nogę, 5 DoF na każde ramię oraz 1 DoF w talii, co zapewnia stabilną i realistyczną lokomocję. Zastosowanie silników PMSM, przemysłowych łożysk oraz podwójnych enkoderów gwarantuje wysoką precyzję, dynamiczną pracę oraz powtarzalność ruchów. Maksymalny moment obrotowy stawu kolanowego wynosi 120 N*m, a maksymalne obciążenie ramienia to około 3 kg. System percepcji oparty o kamerę głębi i 3D LiDAR umożliwia dokładną analizę otoczenia oraz wspiera autonomiczną nawigację. Wbudowany moduł obliczeniowy o mocy 100 TOPS umożliwia przetwarzanie zaawansowanych algorytmów AI w czasie rzeczywistym, a wsparcie dla programowania na poziomie niskim i wysokim daje pełną kontrolę nad zachowaniem robota. Dodatkowo robot oferuje łączność WiFi 6 i Bluetooth 5.2, komunikację głosową oraz zasilanie z akumulatora o pojemności 9000 mAh. To rozwiązanie stworzone nie tylko do nauki, ale przede wszystkim do aktywnego tworzenia i testowania nowoczesnych systemów robotycznych.

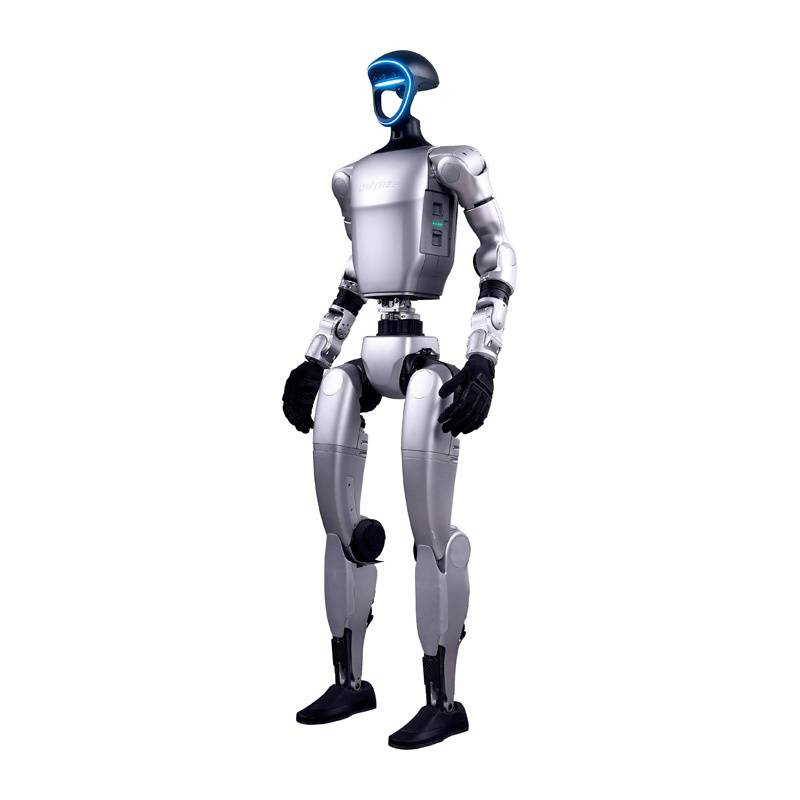
Robot humanoidalny - Unitree G1 Edu U1.
G1 Edu U1 wyposażony jest w system 3D LiDAR Livox MID-360 oraz kamerę głębi Intel RealSense.
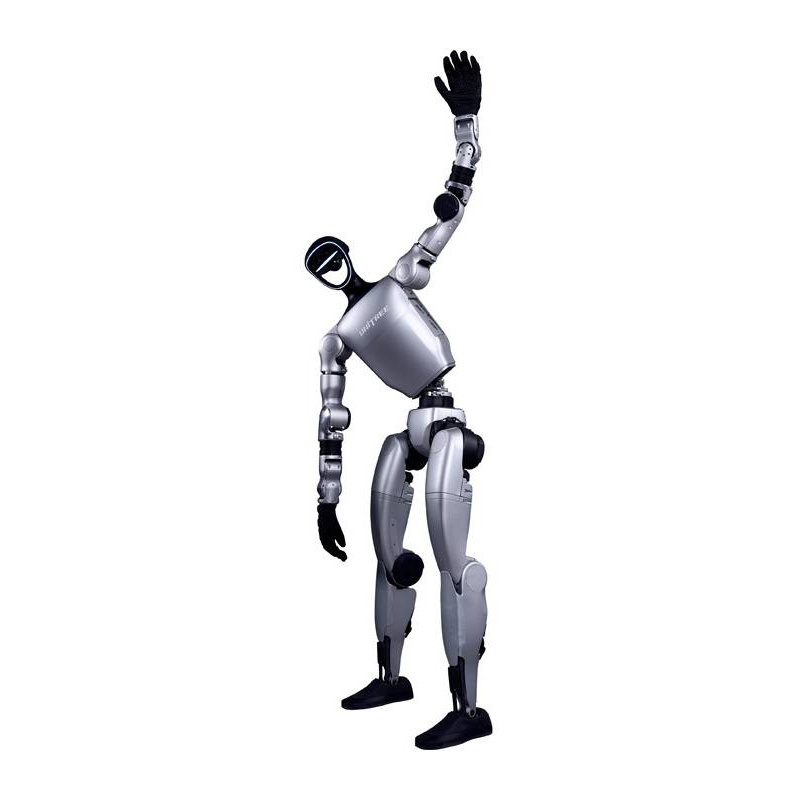
Konstrukcja robota humanoidalnego inspirowana jest anatomią człowieka, co przekłada się na naturalny sposób poruszania i wysoką stabilność. Dzięki zastosowaniu przemysłowych łożysk krzyżowych i podwójnych enkoderów, robot precyzyjnie kontroluje pozycję każdego z 23 stawów. Każda noga wyposażona jest w 6 stopni swobody, umożliwiając stabilny marsz i bieg, a zaawansowane algorytmy stabilizacji aktywnej chronią robota przed upadkiem podczas interakcji z otoczeniem. Zakres ruchu stawów, w tym kolana do 165°, pozwala na realizację złożonych sekwencji ruchowych oraz prowadzenie badań nad lokomocją i kontrolą równowagi. Dzięki temu robot może być wykorzystywany zarówno w środowiskach laboratoryjnych, jak i podczas demonstracji technologii.
Model posiada 23 stopnie swobody.
Konstrukcja robota inspirowana jest anatomią człowieka, co przekłada się na naturalny sposób poruszania i wysoką stabilność.
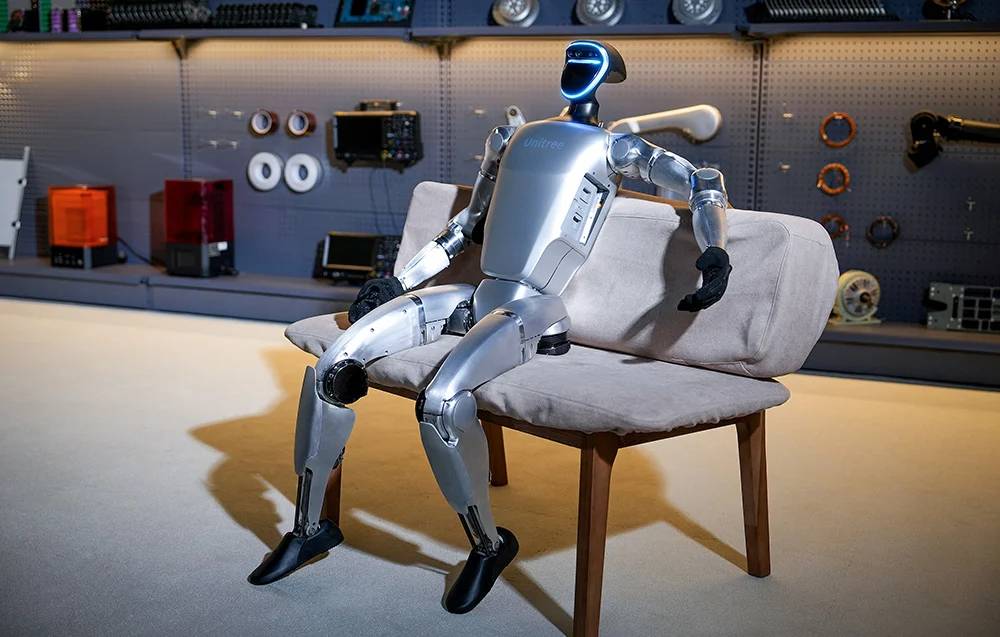
Unitree G1 Edu U1 został wyposażony w zaawansowany zestaw czujników, który obejmuje LiDAR 3D o szerokim polu widzenia oraz kamerę Intel RealSense. System ten umożliwia robotowi nie tylko omijanie przeszkód, ale również rozpoznawanie twarzy, gestów i przedmiotów. Integracja z zestawem 4 mikrofonów i głośnikiem 5 W sprawia, że G1 Edu U1 może być programowany jako interaktywny interfejs głosowy, idealny do badań nad komunikacją człowiek-maszyna.
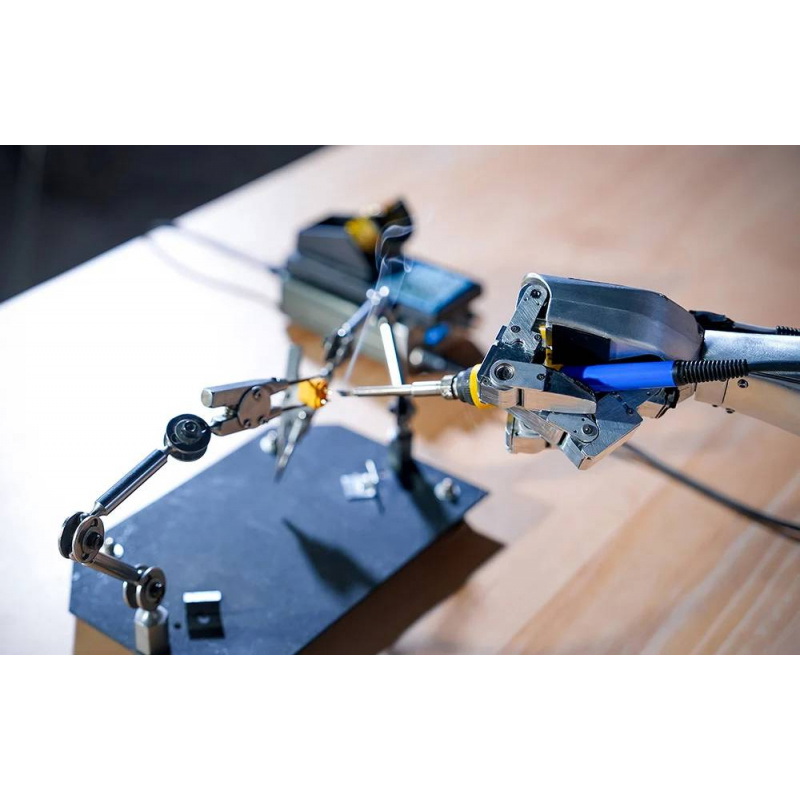
Unitree G1 Edu U1 charakteryzuje się wysoką dynamiką ruchu dzięki zastosowaniu wydajnych napędów oraz solidnej konstrukcji. Maksymalny moment obrotowy stawu kolanowego wynosi 120 N*m, co zapewnia stabilność podczas ruchu i zmian pozycji. Robot charakteryzuje się dużą dynamiką - potrafi osiągać prędkość do 2 m/s. Maksymalne obciążenie ramienia wynosi około 3 kg, co umożliwia realizację zadań manipulacyjnych i eksperymentów z interakcją fizyczną. Mimo zaawansowanych możliwości, G1 Edu U1 pozostaje konstrukcją lekką i mobilną. Masa ok. 35 kg oraz wysokość 132 cm pozwalają na bezpieczne użytkowanie w przestrzeniach zamkniętych. Możliwość złożenia robota do kompaktowych wymiarów (690 x 450 x 300 mm) sprawia, że jest on niezwykle praktyczny w transporcie pomiędzy stanowiskami badawczymi.
G1 Edu U1 wykorzystuje zaawansowany system wizyjny łączący laserowe skanowanie przestrzeni 360° (LiDAR) z obrazowaniem stereoskopowym.

Otwarta architektura wspiera Secondary Development, pozwalając na pełną kontrolę nad systemem.
Seria Unitree G1 Edu została zaprojektowana jako kompleksowa platforma badawcza, umożliwiająca rozwój i testowanie zaawansowanych systemów robotycznych w rzeczywistych warunkach. Otwarta architektura pozwala na pełną integrację własnych algorytmów, zarówno na poziomie sterowania niskopoziomowego, jak i wysokopoziomowych systemów decyzyjnych. Dzięki wbudowanemu portowi rozszerzeń oraz mocy obliczeniowej 100 TOPS, możesz implementować zaawansowane modele AI, systemy percepcji oraz algorytmy planowania ruchu. Producent zapewnia również rozbudowaną dokumentację, co znacząco przyspiesza proces rozwoju projektów. Robot oferuje interfejsy komunikacyjne, takie jak WiFi 6 oraz Bluetooth 5.2, umożliwiające integrację z systemami sterowania i aplikacjami badawczymi. Zasilanie zapewnia akumulator litowy o pojemności 9000 mAh, który pozwala na około 2 godziny pracy, z możliwością szybkiej wymiany.
| Specyfikacja techniczna UnitreeG1 Edu U1 | |
|---|---|
| Całkowita liczba stopni swobody | 23 |
| Stopnie swobody nogi | 6 |
| Stopnie swobody talii | 1 |
| Stopnie swobody ramienia | 5 |
| Stopnie swobody dłoni | 7 (opcjonalne sterowanie siłą dla trójpalczastej dłoni + 2 dodatkowe stopnie swobody nadgarstka) |
| Parametry dłoni Dex3-1 | kciuk: 3 aktywne stopnie swobody, palec wskazujący: 2 aktywne stopnie swobody, palec środkowy: 2 aktywne stopnie swobody |
| Opcjonalna instalacja czujników dotykowych | tak |
| Łożyska stawów | przemysłowe krzyżowe łożyska rolkowe o wysokiej precyzji i dużej nośności |
| Silniki stawów | silniki synchroniczne z magnesami trwałymi PMSM z wewnętrznym wirnikiem o niskiej bezwładności |
| Maksymalny moment obrotowy stawu kolanowego | 120 N*m |
| Maksymalne obciążenie ramienia | około 3 kg |
| Długość łydki i uda | 0,6 m |
| Rozpiętość ramion | około 0,45 m |
| Zakres ruchu talii | Z ±155° |
| Zakres ruchu kolana | od 0° do 165° |
| Zakres ruchu biodra | P ±154°, R od -30 do 170°, Y ±158° |
| Pełne wewnętrzne prowadzenie okablowania | tak |
| Enkoder stawów | podwójny enkoder |
| System chłodzenia | lokalne chłodzenie powietrzem |
| Typ akumulatora | 13-ogniwowy akumulator litowo-jonow |
| Podstawowa moc obliczeniowa | 8-rdzeniowy procesor wysokiej wydajności |
| Czujniki i komunikacja | kamera głębi + 3D LiDAR |
| 4-mikrofonowa matryca | tak |
| Głośnik | 5 W |
| Łączność bezprzewodowa | WiFi 6, Bluetooth 5.2 |
| Moduł wysokiej mocy obliczeniowej | 100 TOPS |
| Akumulator szybkozłączny | tak |
| Pojemność akumulatora | 9000 mAh |
| Ładowarka | 54 V / 5 A |
| Kontroler manualny | tak |
| Czas pracy | około 2 godziny |
| Aktualizacje OTA | tak |
| Możliwość dalszego rozwoju | tak |
| Wymiary w pozycji stojącej | 1320 x 450 x 200 mm |
| Wymiary w pozycji złożonej | 690 x 450 x 300 mm |
| Masa z akumulatorem | ponad 35 kg |
| Porównanie wersji G1 Edu | ||||
|---|---|---|---|---|
| Model | DOF | Dłonie | Sensory dotykowe | |
| G1 Edu U1 | 23 | brak | nie | |
| G1 Edu U2 | 29 | brak | nie | |
| G1 Edu U3 | 43 | 2 x Dex3-1 | nie | |
| G1 Edu U4 | 43 | 2 x Dex3-1 | tak | |
| G1 Edu U5 | 41 | 2 x RH56DFQ | nie | |
| G1 Edu U6 | 41 | 2 x RH56DFTP | tak - 17 sensorów / dłoń | |
| G1 Edu U7 | 41 | 2 x Revo 2 Basic | nie | |
| G1 Edu U8 | 37 | 2 x Dex3-1 | nie | |
| G1 Edu U9 | 37 | 2 x Dex3-1 | tak - 33 sensory / dłoń | |
| G1 Edu U10 | 35 | 2 x Revo 2 Basic | nie | |
Przydatne linki |
| Klasyfikacja GPSR | Sprzęt |
Jako pierwszy zadaj pytanie dotyczące tego produktu!