









Unitree G1 Edu U2 to zaawansowany robot humanoidalny AI wyposażony w 29 stopni swobody, moduł Nvidia Jetson Orin oraz system percepcji kamera głębi + 3D LiDAR. Oferuje moment obrotowy kolana do 120 N*m, udźwig ramienia do 3 kg oraz stabilną lokomocję dzięki 6 DoF na nogę i 3 DoF w talii. Zasilany akumulatorem 9000 mAh (do 2 h pracy), wspiera WiFi 6, Bluetooth 5.2 i rozwój AI poprzez otwartą platformę programistyczną.
Unitree G1 Edu U2 to profesjonalny humanoidalny robot edukacyjny i badawczy, zaprojektowany jako platforma do pracy z algorytmami sztucznej inteligencji, sterowania ruchem i percepcji 3D. Konstrukcja oferuje 29 stopni swobody, w tym 6 DoF na nogę, rozbudowaną talię (3 DoF) oraz zaawansowane manipulatory z opcjonalną dłonią Dex3-1. Robot wykorzystuje silniki PMSM o niskiej bezwładności, przemysłowe łożyska krzyżowe oraz podwójne enkodery, co zapewnia wysoką precyzję i dynamikę ruchu. Maksymalny moment obrotowy stawu kolanowego wynosi 120 N*m, a maksymalne obciążenie ramienia to około 3 kg. System sensoryczny oparty o kamerę głębi i 3D LiDAR umożliwia zaawansowaną analizę otoczenia i autonomiczną nawigację. Za przetwarzanie danych odpowiada 8-rdzeniowy procesor oraz moduł Nvidia Jetson Orin, wspierający aplikacje AI i uczenie maszynowe. Robot oferuje łączność WiFi 6 i Bluetooth 5.2, komunikację głosową (4 mikrofony + głośnik 5 W) oraz zasilanie z akumulatora o pojemności 9000 mAh (do około 2 godzin pracy). Platforma wspiera OTA oraz Secondary Development, co czyni ją idealnym rozwiązaniem dla laboratoriów, uczelni i zespołów R&D.

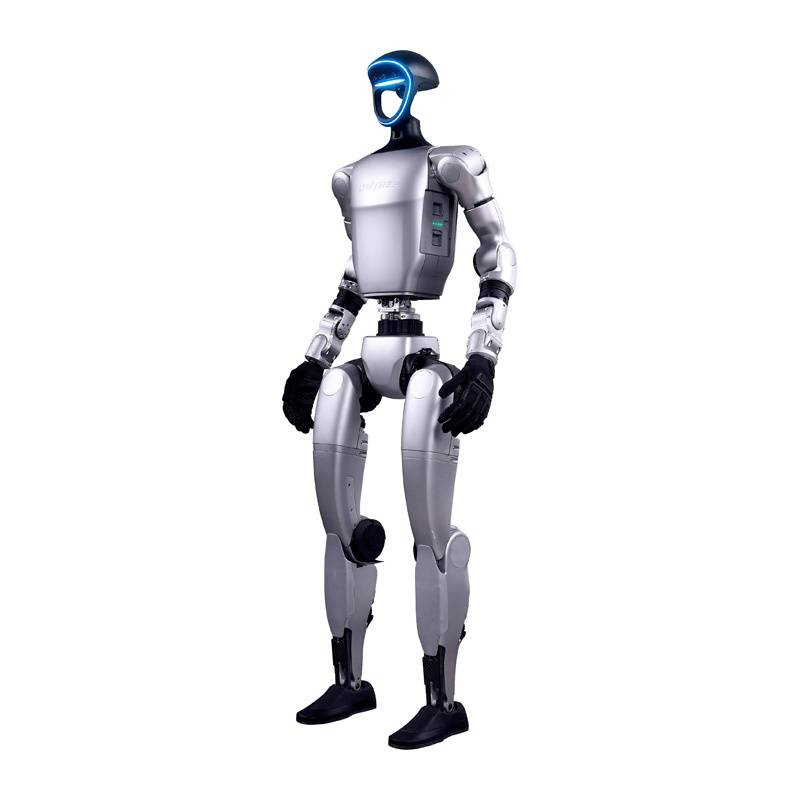
Robot humanoidalny - Unitree G1 Edu U2.
G1 Edu U2 wyposażony w jednostkę obliczeniową Nvidia Jetson Orin, system 3D LiDAR Livox MID-360 oraz kamerę głębi Intel RealSense.
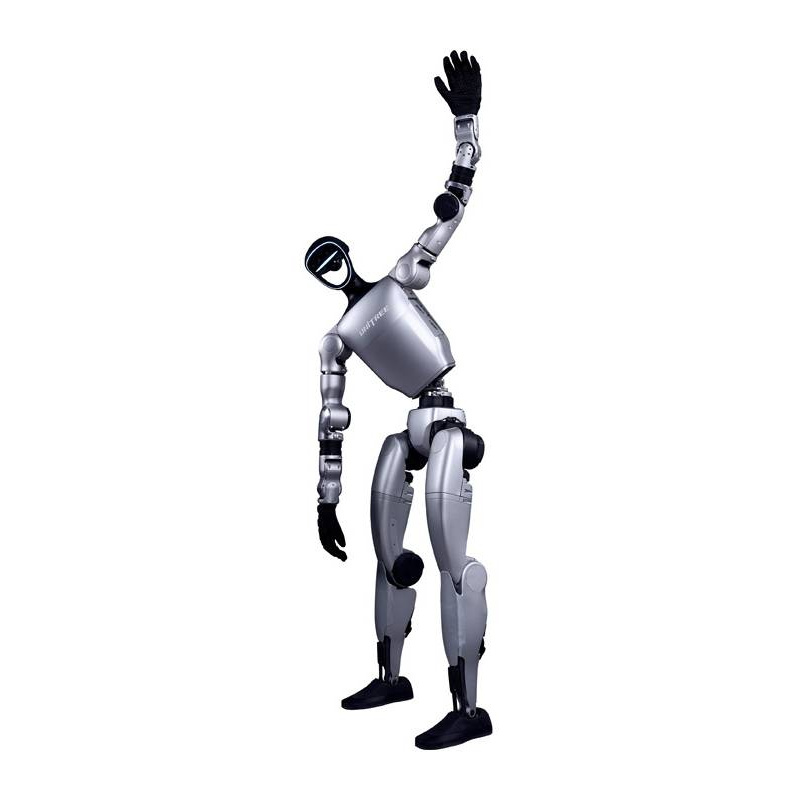
Konstrukcja robota humanoidalnego Unitree G1 Edu U2 została opracowana z wyraźną inspiracją anatomią człowieka, co przekłada się na naturalny charakter ruchów oraz większą płynność pracy całego korpusu. Model oferuje rozbudowany zakres ruchu w talii, biodrach, kolanach i nadgarstkach, dzięki czemu może wykonywać bardziej złożone sekwencje ruchowe oraz utrzymywać równowagę podczas zmiany kierunku i pozycji. Trzy osie ruchu w talii pozwalają na lepszą kompensację środka ciężkości podczas dynamicznego biegu (do 2 m/s). Sześć stopni swobody w każdej nodze sprawia, że robot potrafi płynnie poruszać się po nierównym podłożu, zachowując przy tym pełną równowagę, a precyzyjne sterowanie stawami poprawia stabilność podczas przemieszczania się i zwiększa możliwości badawcze w obszarze lokomocji.
Model posiada 29 stopni swobody (DoF), co przy wysokości 1320 mm i masie 35 kg zapewnia mu niespotykaną zwinność.
Wersja U2 kładzie szczególny nacisk na stabilność tułowia - dodatkowe stopnie swobody w talii (osie X i Y) pozwalają na lepszą kompensację środka ciężkości.
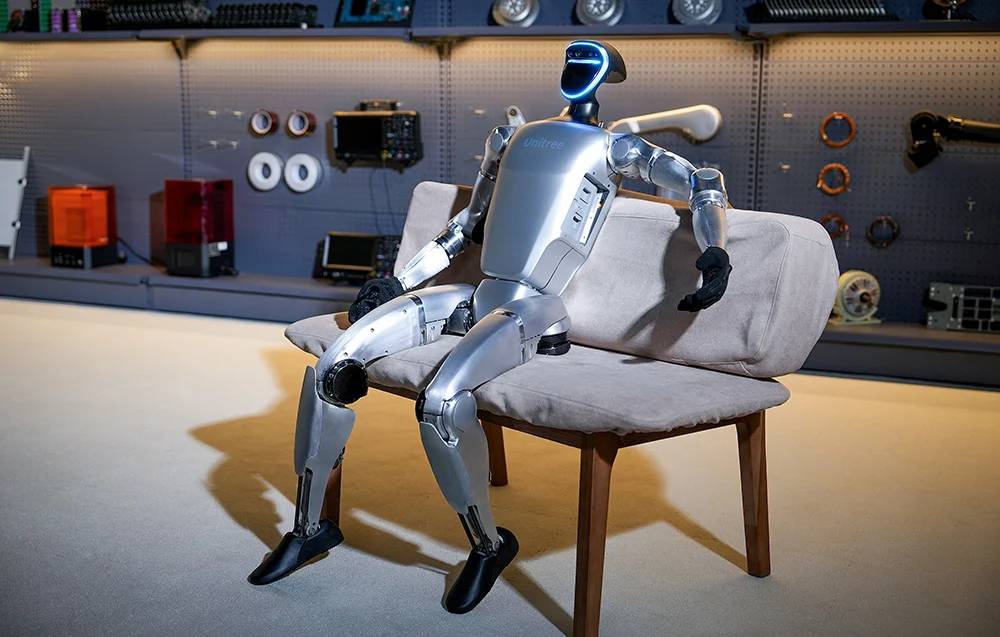
Unitree G1 Edu U2 wykorzystuje zestaw sensorów obejmujący kamerę głębi i 3D LiDAR, co umożliwia analizę otoczenia w czasie rzeczywistym, wykrywanie przeszkód oraz budowanie dokładnego obrazu przestrzeni roboczej. Takie rozwiązanie wspiera badania nad autonomią, planowaniem ruchu, nawigacją oraz orientacją robota w dynamicznym środowisku. Uzupełnieniem systemu percepcji jest tor audio złożony z czterech mikrofonów i głośnika 5 W, który pozwala rozwijać projekty związane z komunikacją głosową, reakcją na komendy oraz interakcją człowiek-robot. Funkcja eliminacji echa sprawia, że robot doskonale radzi sobie w roli interaktywnego asystenta, potrafiąc wyraźnie odpowiadać na komendy głosowe i komunikować status systemu użytkownikowi.
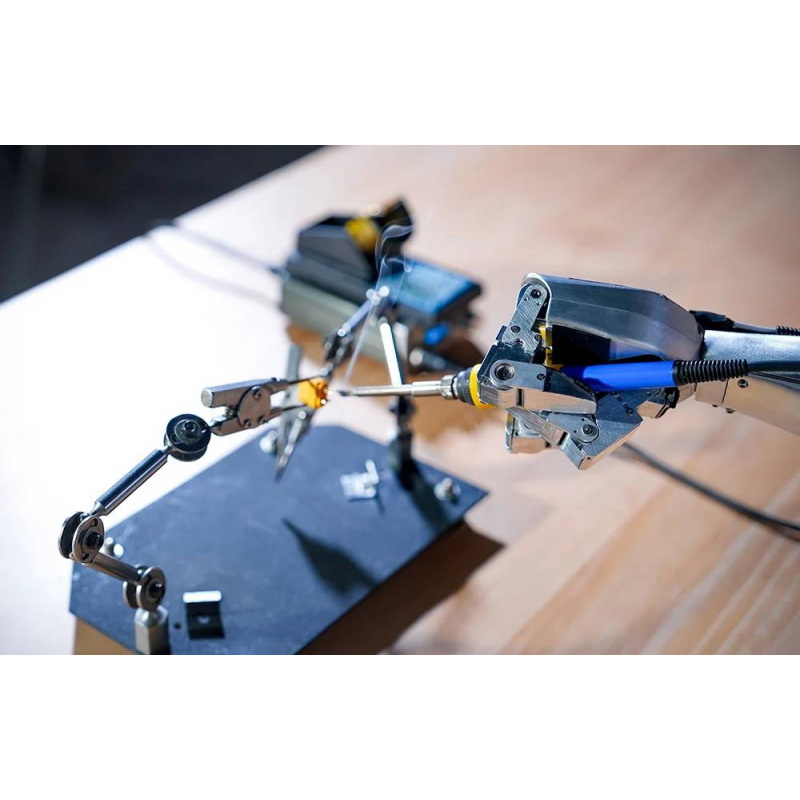
Przy wysokości 1320 mm i masie wynoszącej ponad 35 kg robot zachowuje korzystny balans pomiędzy mobilnością a stabilnością konstrukcji. Maksymalny moment obrotowy stawu kolanowego na poziomie 120 N*m oraz przemysłowe łożyska rolkowe pozwalają realizować dynamiczne ruchy z zachowaniem wysokiej precyzji sterowania. Dodatkową zaletą jest maksymalne obciążenie ramienia wynoszące około 3 kg, co zwiększa użyteczność platformy w badaniach nad manipulacją, chwytaniem i interakcją z obiektami.
G1 Edu U2 wykorzystuje zaawansowany system wizyjny łączący laserowe skanowanie przestrzeni 360° (LiDAR) z obrazowaniem stereoskopowym.

Otwarta architektura wspiera Secondary Development, pozwalając na pełną kontrolę nad systemem za pomocą ROS2 lub C++.
Robot został wyposażony w WiFi 6 oraz Bluetooth 5.2, co ułatwia integrację z aplikacjami, systemami sterowania oraz środowiskami badawczymi. Zasilanie realizowane jest przez akumulator litowy 13-ogniwowy o pojemności 9000 mAh (pozwala na ok. 2 godziny pracy) z funkcją szybkiej wymiany, a dołączona ładowarka 54 V 5 A pozwala sprawnie przygotować robota do kolejnych testów. Wersja Edu wspiera dalszy rozwój oprogramowania, aktualizacje OTA oraz pracę z zaawansowanymi algorytmami, dlatego platforma dobrze nadaje się do programowania w obszarze robotyki, sztucznej inteligencji i sterowania ruchem.
| Specyfikacja techniczna UnitreeG1 Edu U2 | |
|---|---|
| Całkowita liczba stopni swobody | 29 |
| Stopnie swobody nogi | 6 |
| Stopnie swobody talii | 3 |
| Stopnie swobody ramienia | 5 |
| Stopnie swobody dłoni | 7 (opcjonalne sterowanie siłą dla trójpalczastej dłoni + 2 dodatkowe stopnie swobody nadgarstka) |
| Parametry dłoni Dex3-1 | kciuk: 3 aktywne stopnie swobody, palec wskazujący: 2 aktywne stopnie swobody, palec środkowy: 2 aktywne stopnie swobody |
| Opcjonalna instalacja czujników dotykowych | tak |
| Łożyska stawów | przemysłowe krzyżowe łożyska rolkowe o wysokiej precyzji i dużej nośności |
| Silniki stawów | silniki synchroniczne z magnesami trwałymi PMSM z wewnętrznym wirnikiem o niskiej bezwładności |
| Maksymalny moment obrotowy stawu kolanowego | 120 N*m |
| Maksymalne obciążenie ramienia | około 3 kg |
| Długość łydki i uda | 0,6 m |
| Rozpiętość ramion | około 0,45 m |
| Zakres ruchu talii | Z ±155°, X ±45°, Y ±30° |
| Zakres ruchu kolana | od 0° do 165° |
| Zakres ruchu biodra | P ±154°, R od -30 do 170°, Y ±158° |
| Zakres ruchu nadgarstka | P ±92,5°, Y ±92,5° |
| Pełne wewnętrzne prowadzenie okablowania | tak |
| Enkoder stawów | podwójny enkoder |
| System chłodzenia | lokalne chłodzenie powietrzem |
| Typ akumulatora | 13-ogniwowy akumulator litowo-jonow |
| Podstawowa moc obliczeniowa | 8-rdzeniowy procesor wysokiej wydajności |
| Czujniki i komunikacja | kamera głębi + 3D LiDAR |
| 4-mikrofonowa matryca | tak |
| Głośnik | 5 W |
| Łączność bezprzewodowa | WiFi 6, Bluetooth 5.2 |
| Moduł wysokiej mocy obliczeniowej | Nvidia Jetson Orin |
| Akumulator szybkozłączny | tak |
| Pojemność akumulatora | 9000 mAh |
| Ładowarka | 54 V / 5 A |
| Kontroler manualny | tak |
| Czas pracy | około 2 godziny |
| Aktualizacje OTA | tak |
| Możliwość dalszego rozwoju | tak |
| Wymiary w pozycji stojącej | 1320 x 450 x 200 mm |
| Wymiary w pozycji złożonej | 690 x 450 x 300 mm |
| Masa z akumulatorem | ponad 35 kg |
| Porównanie wersji G1 Edu | ||||
|---|---|---|---|---|
| Model | DOF | Dłonie | Sensory dotykowe | |
| G1 Edu U1 | 23 | brak | nie | |
| G1 Edu U2 | 29 | brak | nie | |
| G1 Edu U3 | 43 | 2 x Dex3-1 | nie | |
| G1 Edu U4 | 43 | 2 x Dex3-1 | tak | |
| G1 Edu U5 | 41 | 2 x RH56DFQ | nie | |
| G1 Edu U6 | 41 | 2 x RH56DFTP | tak - 17 sensorów / dłoń | |
| G1 Edu U7 | 41 | 2 x Revo 2 Basic | nie | |
| G1 Edu U8 | 37 | 2 x Dex3-1 | nie | |
| G1 Edu U9 | 37 | 2 x Dex3-1 | tak - 33 sensory / dłoń | |
| G1 Edu U10 | 35 | 2 x Revo 2 Basic | nie | |
Przydatne linki |
| Klasyfikacja GPSR | Sprzęt |
Jako pierwszy zadaj pytanie dotyczące tego produktu!