Unitree D1 to lekkie i precyzyjne robotyczne ramię manipulacyjne wyposażone w 6 osi ruchu oraz chwytak, przeznaczone do badań nad robotyką manipulacyjną, teleoperacją i systemami embodied AI. Dzięki zasięgowi do 670 mm oraz udźwigowi około 500 g umożliwia realizację złożonych zadań manipulacyjnych. Obsługuje sterowanie pozycją, prędkością i siłą, co ułatwia integrację z platformami badawczymi i robotami mobilnymi, jak Unitree Go2.
Unitree D1 to kompaktowe ramię robotyczne zaprojektowane do pracy w projektach badawczych, systemach automatyki oraz eksperymentach związanych z manipulacją obiektami. Konstrukcja wykorzystuje 6 przegubów obrotowych i chwytak, co zapewnia wysoki stopień swobody ruchu i umożliwia dokładne pozycjonowanie końcówki roboczej w przestrzeni. Ramię wyposażono w cyfrowe serwomechanizmy typu bus servo z obsługą kontroli położenia, prędkości i siły, dzięki czemu sprawdza się zarówno w zastosowaniach edukacyjnych, jak i w bardziej zaawansowanych systemach teleoperacji oraz embodied intelligence. Lekka konstrukcja z aluminium o masie około 2,37 kg ułatwia integrację z różnymi platformami roboczymi, jak Unitree Go2 i stanowiskami testowymi.

Ramię robota zdalnie sterowane - Unitree D1.

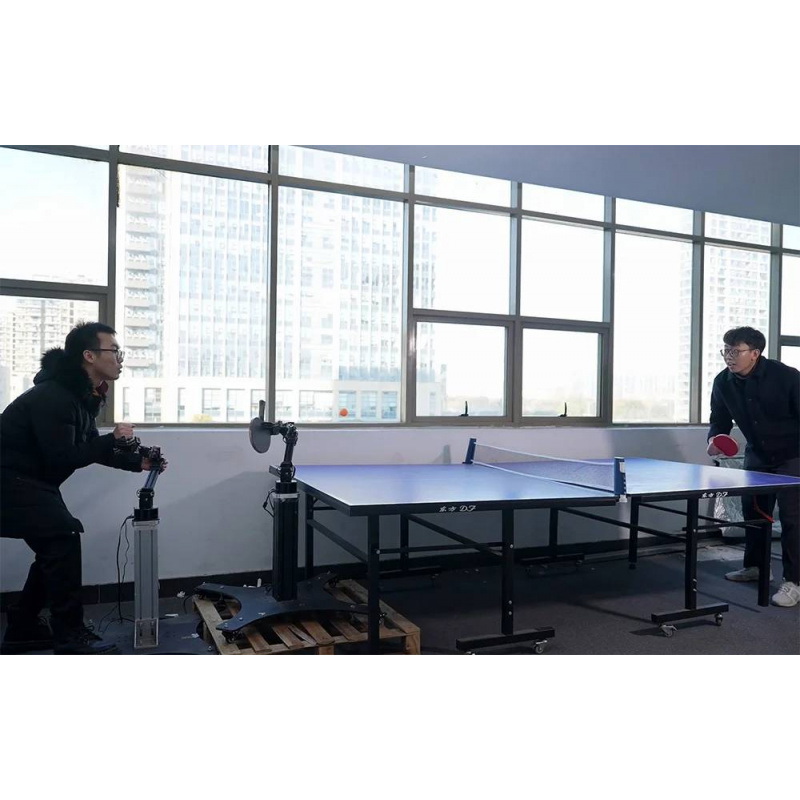
Ramię robota zostało zaprojektowane do manipulowania przedmiotami oraz odwzorowywania ruchów ludzkiej ręki, umożliwiając precyzyjne wykonywanie operacji chwytania i przemieszczania obiektów.
Ramię Unitree D1 może być wykorzystywane jako praktyczne rozszerzenie możliwości robota mobilnego Unitree Go2. Połączenie mobilnej platformy z precyzyjnym manipulatorem umożliwia realizację bardziej zaawansowanych zadań, takich jak chwytanie obiektów, interakcja z otoczeniem czy zbieranie danych do projektów AI. Taki zestaw dobrze sprawdza się w badaniach nad teleoperacją, robotyką mobilną i embodied intelligence, gdzie istotne jest połączenie mobilności z precyzyjną manipulacją.

Robotyczne ramię D1 przeznaczone do współpracy z Unitree Go2 rozszerza funkcjonalność robota.
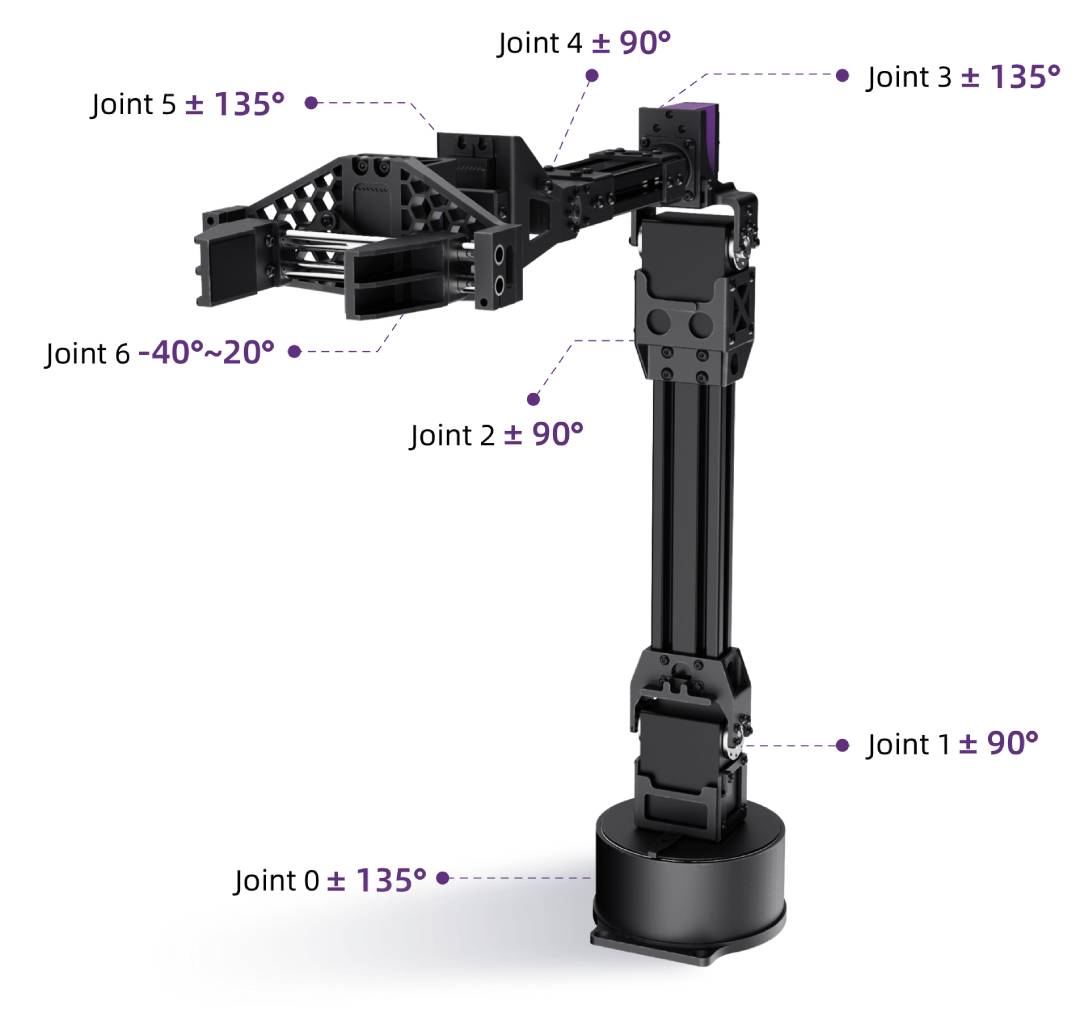
Ramię wyróżnia się bardzo wysokim stopniem swobody ruchu - zostało wyposażone w sześć przegubów oraz chwytak.
Przydatne linki |
| Klasyfikacja GPSR | Komponent |
Jako pierwszy zadaj pytanie dotyczące tego produktu!
Informacja o produkcie
Produkt jest komponentem przeznaczonym do dalszego montażu/prototypowania. Nie stanowi on samodzielnego wyrobu gotowego w rozumieniu przepisów o bezpieczeństwie produktów.
Dane GPSR
Kraj pochodzenia: Polska
Dane kontaktowe producenta: INNPRO Robert Błędowski Sp. z o.o., ul. Rudzka 65c, 44-200 Rybnik
Dane kontaktowe wprowadzającego na rynek UE: INNPRO Robert Błędowski Sp. z o.o., ul. Rudzka 65c, 44-200 Rybnik