Płytka z czujnikiem odległości opartym na technologii Lidar. Czujnik pracuje w zakresie do 50 cm, zasilany jest napięciem od 3 V do 5,5 V. Został wyposażony został w jedno wyjście cyfrowe, które zmienia swój stan na niski po wykryciu obiektu. Moduł z czujnikiem nie dokonuje pomiaru odległości, informuje jedynie o wykryciu przeszkody w odległości do 50 cm z dokładnością do 1 mm. Technologia Lidar krótkiego zasięgu wykorzystywana jest do precyzyjnego pomiaru czasu potrzebnego, aby wyemitowane impulsy światła podczerwonego, bezpiecznego dla oczu, dotarły do najbliższego obiektu i zostały odbite z powrotem.
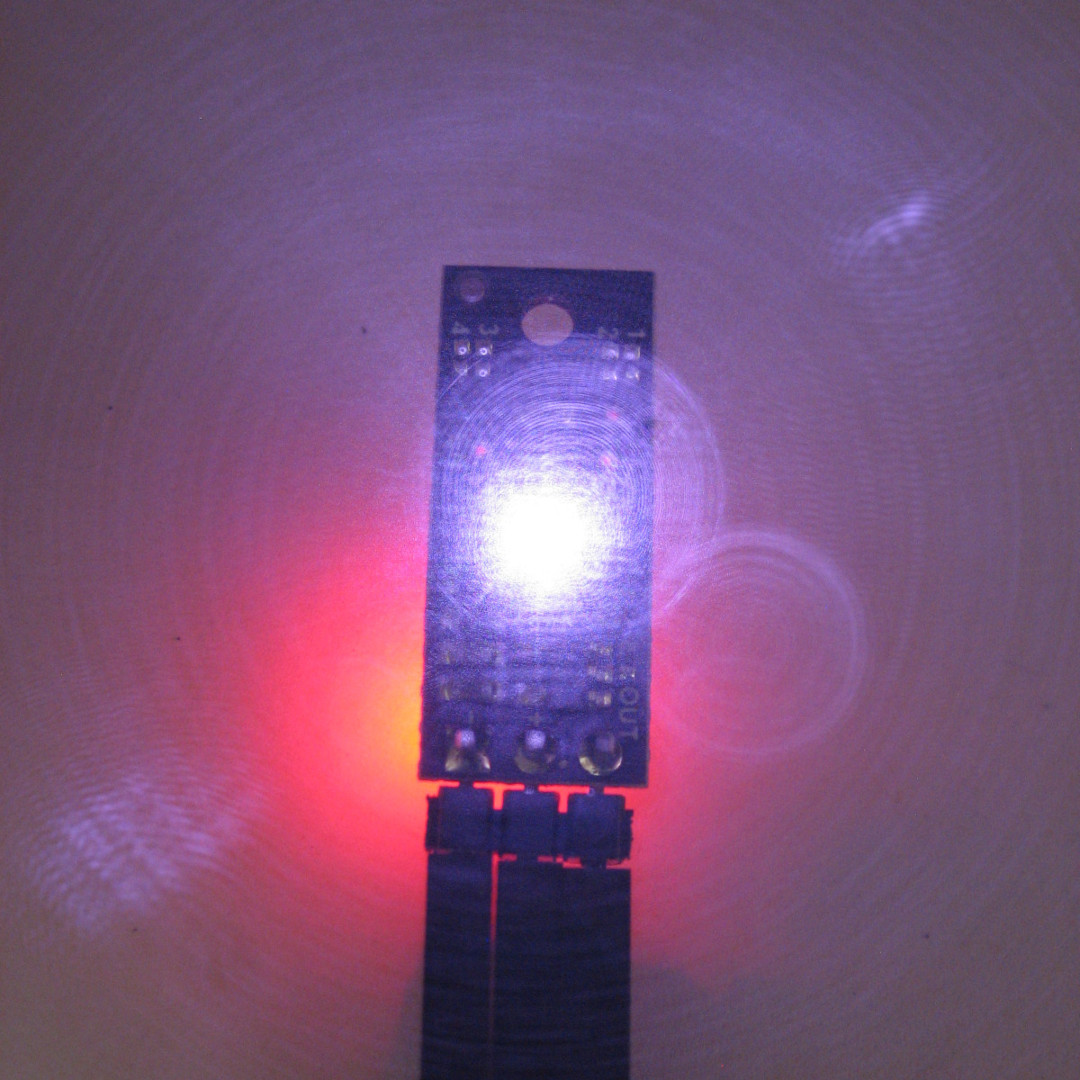
Emitowane przez czujnik światło podczerwone, zarejestrowane kamerą bez filtra IR.
Cyfrowy czujnik odległości 100 cm.
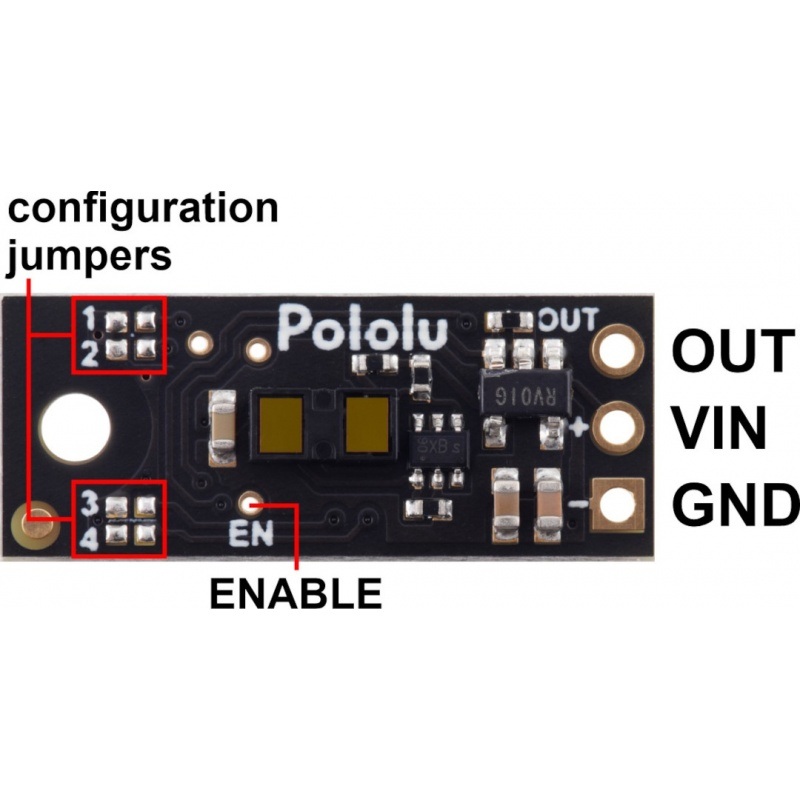
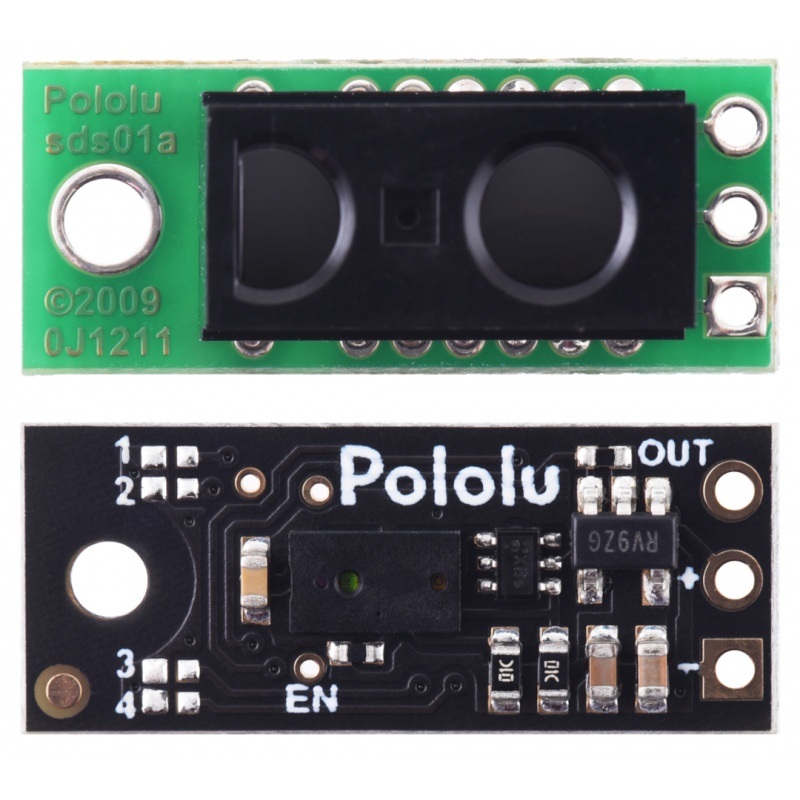
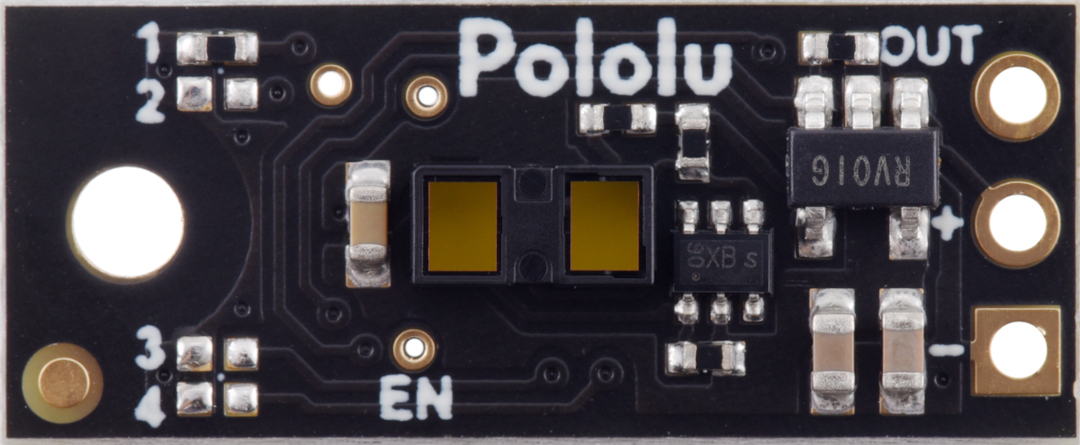
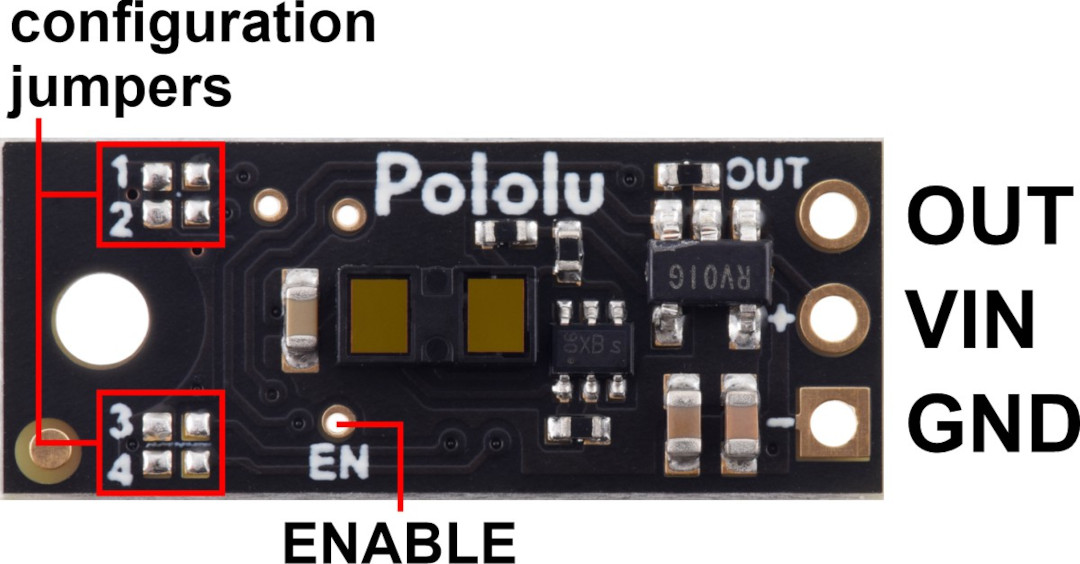
Moduł posiada 3 wyprowadzenia: VIN, GND i OUT, w postaci otworów o rastrze 2,54 mm, z możliwością wlutowania złącz goldpin (brak w zestawie). Pin VIN służy do zasilania modułu od 3 V do 5,5 V, GND to pin masy układu (0 V). Na pinie OUT pojawia się stan niski (0 V), gdy zostanie wykryty obiekt i wysoki (do poziomu VIN), w przypadku braku wykrycia obiektu. Po wykryciu obiektu zapala się również czerwona dioda LED. Na płytce znajduje się także pin ENABLE, który można ustawić w stanie niskim, aby wprowadzić go w stan niskiego poboru mocy, który zużywa ok 0,4 mA prądu. Pin ENABLE domyślnie jest podciągnięty do VIN.
Na czujniku umieszczono folię ochronną, którą należy zdjąć przed rozpoczęciem pracy z modułem.
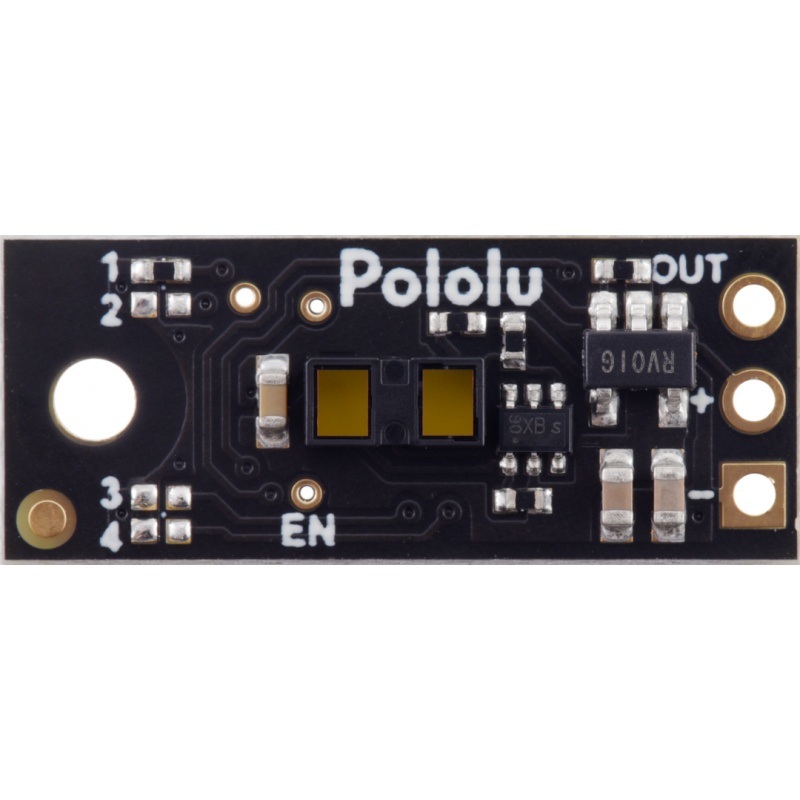
Płytka zawiera cztery zworki konfiguracyjne (4321) do montażu powierzchniowego, które określają jej tryby pracy. Różne wersje czujników Pololu posiadają odpowiednio ustawione zworki w postaci rezystorów 0 Ω. Rezystory można wylutować lub dodać mostki, aby przekształcić jedną wersję czujnika w inną. Ten czujnik można przekształcić w dowolną inną wersję irs17a zgodnie z poniższą tabelą.
| Produkt | Opis | Zasięg maks. | Histereza | Rozkład | Minimalna częstotliwość aktualizacji | Ustawienia zworek (4321) |
|---|---|---|---|---|---|---|
| #4066 | Wyjście cyfrowe, 25 cm | 25 cm | 50 mm | - | 100 Hz | 0000 |
| #4067 | Wyjście cyfrowe, 50 cm | 50 cm | 50 mm | - | 100 Hz | 0001 |
| Wyjście cyfrowe, 75 cm | 75 cm | 50 mm | - | 100 Hz | 0010 | |
| #4069 | Wyjście cyfrowe, 100 cm | 100 cm | 50 mm | - | 100 Hz | 0011 |
| Wyjście cyfrowe, dowolne wykrycie | ~130 cm | - | - | 100 Hz | 0010 | |
| #4071 | Wyjście PWM, maks. 130 cm | ~130 cm | - | 1 mm (- 0,5 µs) | 100 Hz (maks. 110 Hz) | 0101 |
| Wyjście cyfrowe, 125 cm | 125 cm | 50 mm | - | 30 Hz | 1000 | |
| Wyjście cyfrowe, 150 cm | 150 cm | 50 mm | - | 30 Hz | 1001 | |
| Wyjście cyfrowe, 175 cm | 175 cm | 50 mm | - | 30 Hz | 1010 | |
| #4077 | Wyjście cyfrowe, 200 cm | 200 cm | 50 mm | - | 30 Hz | 1011 |
| Wyjście cyfrowe, dowolne wykrycie | ~300 cm | - | - | 30 Hz | 1100 | |
| #4079 | Wyjście PWM, maks. 300 cm | ~300 cm | - | 2 mm (= 0,5 µs) | 30 Hz (maks. 33 Hz) | 1101 |
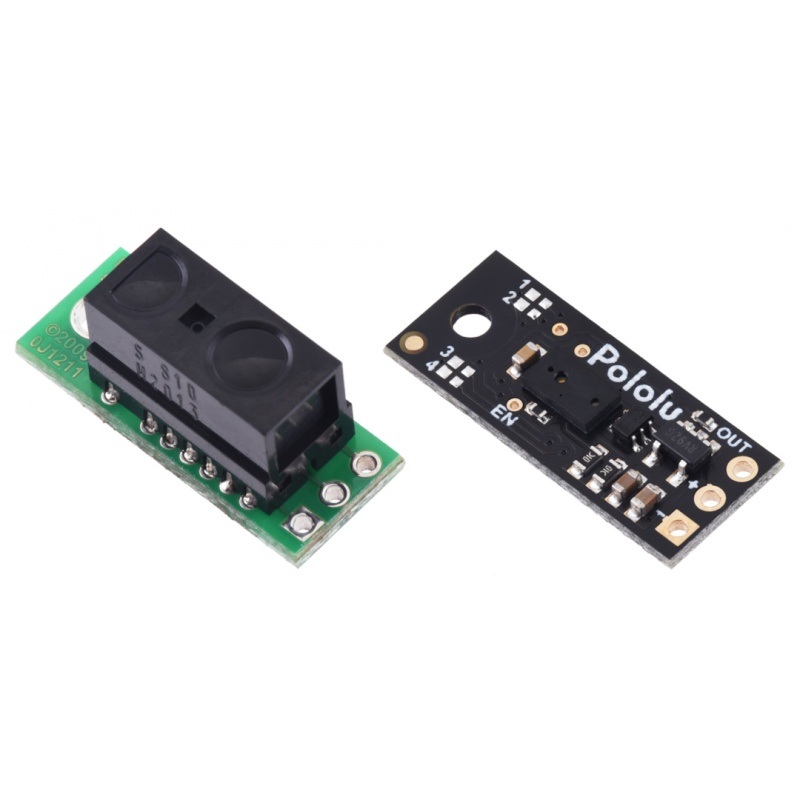
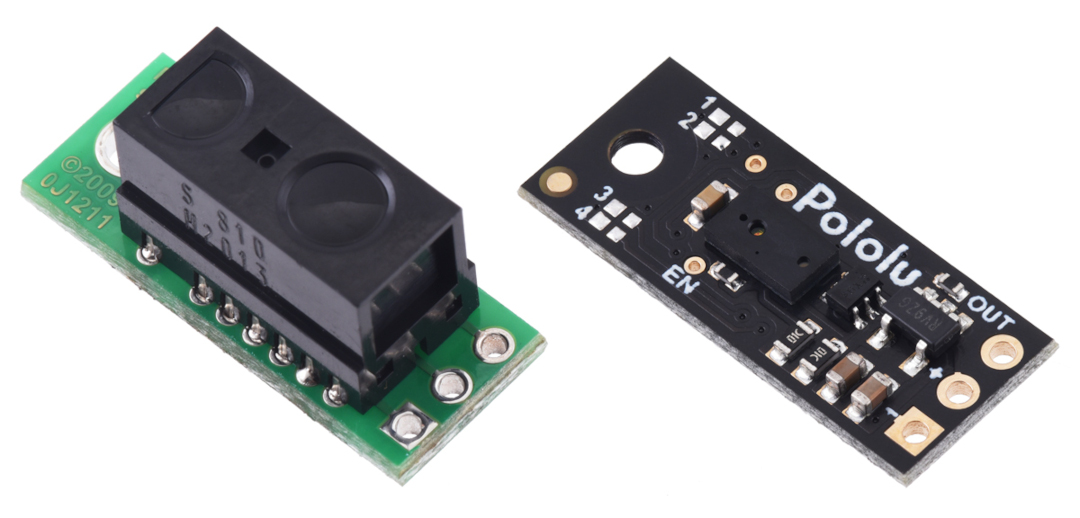 Porównanie czujników Pololu i Sharp.
Porównanie czujników Pololu i Sharp.Moduły z czujnikami Pololu mają ten sam kształt i wyprowadzenia co moduły Sharp. Są dostępne o tych samych oraz większych zakresach wykrywania, oznacza to, że mogą być stosowane zamiennie. Czujniki w nowszych urządzeniach Pololu są znacznie cieńsze niż w modułach Sharp, więc punkt zerowy znajduje się około 7 mm bliżej płytki, a kąt wiązki w nowszych urządzeniach jest szerszy.
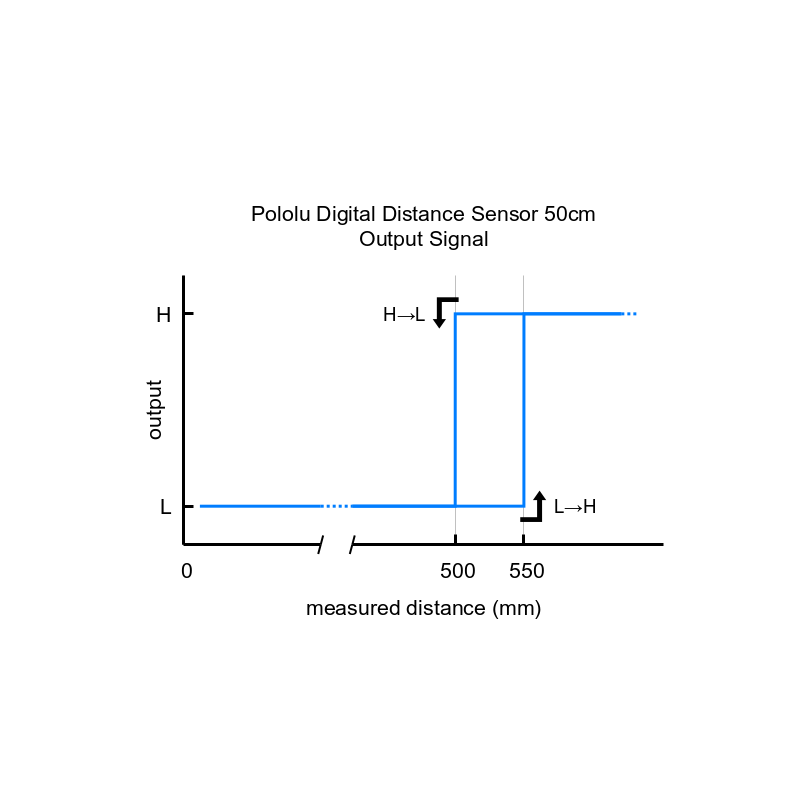
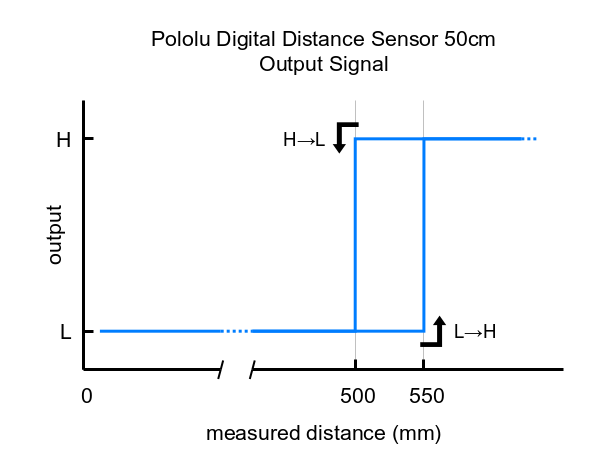 Schemat sygnału wyjściowego.
Schemat sygnału wyjściowego.
Przydatne linki |
| Napięcie zasil. od | 3.0 V |
| Napięcie zasil. do | 5.5 V |
| Interfejs | Cyfrowy I/O |
| Moduł - Odległ. do | 50 cm |
| Moduł - Odległ. od | 0.1 cm |
| Klasyfikacja GPSR | Komponent |
| Szerokość opakowania | 7.8 cm |
| Wysokość opakowania | 8.6 cm |
| Głębokość opakowania | 0.2 cm |
| Masa opakowania | 0.001 kg |
Jako pierwszy zadaj pytanie dotyczące tego produktu!

Informacja o produkcie
Produkt jest komponentem przeznaczonym do dalszego montażu/prototypowania. Nie stanowi on samodzielnego wyrobu gotowego w rozumieniu przepisów o bezpieczeństwie produktów.
Dane GPSR
Kraj pochodzenia: Stany Zjednoczone
Dane kontaktowe producenta: Pololu Corporation 920 Pilot Rd. Las Vegas, NV 89119 USA [email protected]
Dane kontaktowe wprowadzającego na rynek UE: BOTLAND B. DERKACZ SP. K. Gola 25A - 63-640 Bralin