































































































































































































































































































































































































Produkty, których sprzedaż została zakończona.
- Nowość!
- Darmowa dostawa

- Nowość!
- Pakiet
- Darmowa dostawa

xTool P3 - wycinarka i grawerka laserowa CO2 80W - Versatile Bundle
Indeks: XTL-28631
- Nowość!
- Darmowa dostawa
- Nowość!
- Darmowa dostawa

System filtracji do drukarek Prusa CORE One/+ i CORE One L
Indeks: PSA-27492
- Nowość!
- Darmowa dostawa

Siłownik elektryczny LD1 96N 9,5mm/s 12V - wysuw 10cm
Indeks: ELB-15477
- Wyprzedaż
- Darmowa dostawa
- Wyprzedaż

PN532 kontroler NFC/RFID 13,56MHz - Adafruit 364
Indeks: ADA-02956
- Wyprzedaż
- Darmowa dostawa
- Wyprzedaż

- Obniżka
- Darmowa dostawa
- Wyprzedaż

- Obniżka
- Darmowa dostawa
- Wyprzedaż

- Obniżka
- Darmowa dostawa
- Wyprzedaż

Siłownik elektryczny Super Power Jack 2000N 7,5mm/s 12V - wysuw 30cm
Indeks: MOT-05364
- Obniżka
- Darmowa dostawa
- Wyprzedaż

Produkty wycofane














































































Loading...

Sharp GP2Y0D810Z0F - cyfrowy czujnik odległości 10cm - Pololu 1135
Cyfrowy czujnik odległości Sharp GP2Y0D810Z0F wykrywający obiekty w odległości do 10 cm.
Indeks: PLL-00011
Indeks: PLL-00011
- Produkt wycofany
- Darmowa dostawa

Soft Power Switch Mk2 - przełącznik zasilania ze złączem JST 2mm - SparkFun SPX-25365
Soft Power Switch Mk2 ze złączem JST 2 mm to inteligentny przełącznik zasilania , który działa jak przycisk on/off w laptopie. Umożliwia płynne włączanie i wyłączanie...
Indeks: SPF-25649
Indeks: SPF-25649
- Produkt wycofany
- Darmowa dostawa

DFRobot Turtle 2WD - 2-kołowe podwozie robota z napędem
Uniwersalna, mobilna platforma z dwoma kołami i kulką podporową. Posiada dwa silniki prądu stałego, które można kontrolować przy pomocy dowolnego mikrokontrolera (w tym...
Indeks: DFR-02733
Indeks: DFR-02733
- Produkt wycofany
- Darmowa dostawa
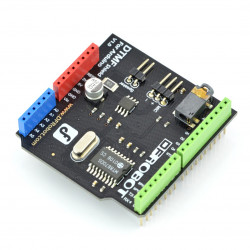
DFRobot DTMF Shield - nakładka dla Arduino
Nakładka do Arduino umożliwiająca detekcję i dekodowanie sygnału DTMF. Moduł pozwala na sterowanie Arduino poprzez komendy audio z dowolnego telefonu.
Indeks: DFR-03562
Indeks: DFR-03562
- Produkt wycofany
- Darmowa dostawa

Miniaturowy silnik z serii low power firmy Pololu z przekładnią 100:1, posiada 120 obr / min, moment obrotowy wynosi 0,9 kg*cm (0,882 Nm).
Indeks: PLL-00706
Indeks: PLL-00706
- Produkt wycofany
- Darmowa dostawa

Miniaturowy silnik wysokiej mocy firmy Pololu z przekładnią 150:1, posiada 200 obr/min, moment obrotowy wynosi 2,9 kg*cm (0,284 Nm).
Indeks: PLL-00723
Indeks: PLL-00723
- Produkt wycofany
- Darmowa dostawa

Miniaturowy silnik wysokiej mocy firmy Pololu z przekładnią 210:1, posiada 140 obr/min, moment obrotowy wynosi 3,6 kg*cm (0,353 Nm).
Indeks: PLL-00724
Indeks: PLL-00724
- Produkt wycofany
- Darmowa dostawa

Miniaturowy silnik wysokiej mocy firmy Pololu z przekładnią 250:1, posiada 120 obr/min, moment obrotowy wynosi 3,4 kg*cm (0,33 Nm).
Indeks: PLL-00726
Indeks: PLL-00726
- Produkt wycofany
- Darmowa dostawa

Silnik HP 1000:1 - Pololu 1595
Miniaturowy silnik wysokiej mocy firmy Pololu z przekładnią 1000:1, posiada 32 obr/min, moment obrotowy wynosi 9,0 kg*cm (0,882 Nm).
Indeks: PLL-00728
Indeks: PLL-00728
- Produkt wycofany
- Darmowa dostawa

High-Power 18v15 - jednokanałowy sterownik silników 30V/15A - Pololu 755
Oparty na tranzystorach MOSFET wydajny mostek H pozwala kontrolować obroty silnika w obu kierunkach. Zasilanie silników: od 5,5 V do 30 V. Prąd maksymalny: 15 A.
Indeks: PLL-00744
Indeks: PLL-00744
- Produkt wycofany
- Darmowa dostawa

Stacja lutownicza 5w1 hotair, grotowa + zasilacz 15V/1A WEP 853D z wentylatorem w kolbie
Stacja posiada trzy główne funkcje: stacji na gorące powietrze i lutownicy grotowej, zasilacza serwisowego 15V/1A, testera sygnału RF. Regulacja temperatury dostępna jest w...
Indeks: LUT-00908
Indeks: LUT-00908
- Produkt wycofany
- Darmowa dostawa
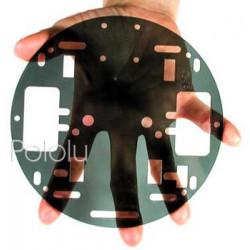
RRC04A 5'' 2-kołowe podwozie - przeźroczyste szare - Pololu 250
Podwozie w kształcie okręgu o średnicy 127 mm wykonane z 3 mm akrylu. Płyta posiada otwory które umożliwiają łatwy montaż elementów firmy Tamiya.
Indeks: PLL-00966
Indeks: PLL-00966
- Produkt wycofany
- Darmowa dostawa

Silnik wibracyjny 8x3,4mm - Pololu 1637
Mały silnik generujący wibracje o amplitudzie 0,75 g. Pobiera około 60 mA prądu przy zasilaniu napięciem 3 V.
Indeks: PLL-01003
Indeks: PLL-01003
- Produkt wycofany
- Darmowa dostawa

Miniaturowy silnik z serii medium power firmy Pololu z przekładnią 50:1, posiada 420 obr/min, moment obrotowy wynosi 0,9 kg*cm (0,088 Nm).
Indeks: PLL-01087
Indeks: PLL-01087
- Produkt wycofany
- Darmowa dostawa

Silnik 25Dx54L HP z przekładnią 99:1 6V 100RPM - Pololu 1576
Silnik firmy Pololu z przekładnią 99:1, generuje 100 obr/min, moment obrotowy wynosi 11,5 kg*cm (1,12Nm). Zasilany napięciem 6 V, średni pobór prądu to ok. 450 mA (maks. 6000...
Indeks: PLL-01218
Indeks: PLL-01218
- Produkt wycofany
- Darmowa dostawa

Koła 70x8mm - czarne - Pololu 1425
Komplet plastikowych kół (2 szt.) z gumowymi oponami zapewniającymi wysoką przyczepność. Dopasowane do silników z przekładniami Pololu.
Indeks: PLL-01253
Indeks: PLL-01253
- Produkt wycofany
- Darmowa dostawa

NCP1402 - przetwornica step-up - 3,3V 0,2A - Pololu 2114
Miniatura przetwornica step-up. Napięcie wejściowe 0,8 V do 3,3 V. Prąd wyjściowy 200 mA. Napięcie wyjściowe 3,3 V.
Indeks: PLL-01408
Indeks: PLL-01408
- Produkt wycofany
- Darmowa dostawa
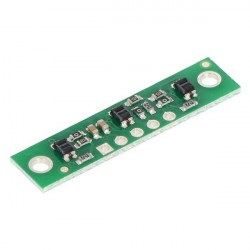
Listwa z czujnikami odbiciowymi QTR-3RC - cyfrowa - Pololu 2457
Kompaktowa listwa z trzema czujnikami odbiciowymi o wymiarach 32 x 8 mm. Posiada wyjścia cyfrowe, zasilana jest napięciem 5 V.
Indeks: PLL-01731
Indeks: PLL-01731
- Produkt wycofany
- Darmowa dostawa

Aluminiowy hub mocujący 4mm M3 - 2szt. - Pololu 1997
Hub pozwala na łatwe zamontowania koła na silnik z wałem 4 mm za pomocą śrubek o rozmiarze M3. W zestawie dwie sztuki.
Indeks: PLL-01840
Indeks: PLL-01840
- Produkt wycofany
- Darmowa dostawa

Zestaw enkoderów optycznych do micro silników Pololu - wersja 3,3V - 2 szt. - Pololu 2591
Para optycznych enkoderów kwadraturowych, przeznaczona do montażu w micro silnikach firmy Pololu. Składający się z płytki z czujnikiem oraz plastikowego wirnika zestaw,...
Indeks: PLL-01878
Indeks: PLL-01878
- Produkt wycofany
- Darmowa dostawa
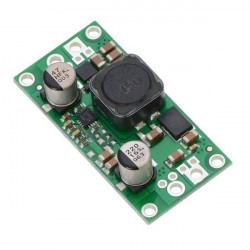
S18V20F6 - przetwornica step-up/step-down - 6V 2A - Pololu 2575
Przetwornica step-up/step-down o napięciu wyjściowym 6 V . Maksymalny prąd 2 A . Zasilanie 3 V - 30 V.
Indeks: PLL-02099
Indeks: PLL-02099
- Produkt wycofany
- Darmowa dostawa
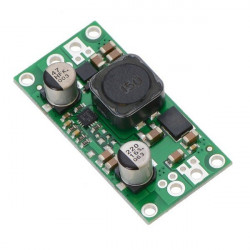
S18V20AHV - przetwornica step-up/step-down - regulowana 9-30V 2A - Pololu 2573
Przetwornica step-up/step-down o napięciu wyjściowym regulowanym z zakresu od 9 V do 30 V. Maksymalny prąd 2 A. Zasilanie 3 V - 30 V.
Indeks: PLL-02101
Indeks: PLL-02101
- Produkt wycofany
- Darmowa dostawa
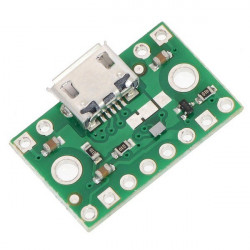
Złącze zasilające microUSB z multiplekserem FPF1320 - Pololu 2594
Płytka ze złączem microUSB funkcjonująca jak multiplekser źródła zasilania. Układ FPF1320 pozwala wybrać, które z dwóch źródeł będzie podłączone do układu docelowego. Moduł...
Indeks: PLL-02140
Indeks: PLL-02140
- Produkt wycofany
- Darmowa dostawa

Tamiya 70101 - koła z oponami 36mm - 4szt.
Komplet czterech kół firmy Tamiya o średnicy 36 mm. Koła współpracują z sześciokątnymi wałami stosowanymi w przekładniach Tamiya.
Indeks: WHE-02220
Indeks: WHE-02220
- Produkt wycofany
- Darmowa dostawa
Zobacz również