

















































































































































































































































































- Nowość!
- Darmowa dostawa



Zasilacz Baseus Compact Quick Charger 3x USB-A - 5V/3,4A 17W - czarny

Pakiet filamentów ze szpulami Devil Design - StartPack PLA - 4szt.

Shelly Gas LPG - czujnik gazu skroplonego - WiFi - aplikacja Android/iOS

Zrozumieć Elektronikę (5/2026) - miesięcznik, wydanie cyfrowe


Siłownik elektryczny LA10 150N 40mm/s 12V - wysuw 30cm
Produkty, których sprzedaż została zakończona.

Sharp GP2Y0D810Z0F - cyfrowy czujnik odległości 10cm - Pololu 1135
Cyfrowy czujnik odległości Sharp GP2Y0D810Z0F wykrywający obiekty w odległości do 10 cm.
Moduł WiFi 2,4/5,8 GHz oraz Bluetooth 4.2 USB - Odroid 5BK
Moduł pozwalający na komunikację bezprzewodową WiFi 2,4 GHz / 5,8 GHz w standardzie 802.11 b / g / n / ac oraz Bluetooth 4.2 . Współpracuje z serią modułów Odroid z...
Cyfrowy czujnik odległości - 15cm - Pololu 4054
Moduł z cyfrowym czujnikiem odległości od firmy Pololu. Pozwala na wykrywanie obecności obiektów znajdujących się w promieniu do 15 cm . Informuje o ich obecności, ale nie...
Cyfrowy czujnik odległości - 50cm - Pololu 4064
Cyfrowy czujnik odległości umożliwiający wykrycie obiektu w promieniu do 50 cm . Napięcie zasilania mieści się w zakresie od 3 V do 5,5 V , a komunikacja odbywa się za pomocą...
Konwerter USB-UART CP2102N - ze złączem microUSB - Pololu 1317
Moduł oparty na układzie CP2102 , który pozwala na konwersje danych pomiędzy standardami USB-UART . Z wykorzystaniem konwertera od Pololu można wymieniać dane pomiędzy...
Silnik HPCB 1000:1 - Pololu 3070
Miniaturowy silnik wysokiej mocy firmy Pololu z wytrzymałymi, karbonowymi szczotkami. Posiada przekładnie 1000:1, prędkość obrotowa to 32 obr/min, moment obrotowy wynosi 9,0...
Silnik HPCB 150:1 - Pololu 3066
Miniaturowy silnik wysokiej mocy firmy Pololu z wytrzymałymi, karbonowymi szczotkami. Posiada przekładnie 150:1, prędkość obrotowa to 200 obr/min, moment obrotowy wynosi 2,9...
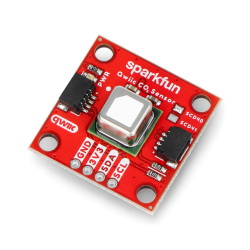
Fermion - czujnik jakości powietrza - SGP40 - DFRobot SEN0392
Czujnik jakości powietrza od firmy DFRobot. Moduł został wyposażony w układ SGP40 produkcji popularnej firmy, jaką jest Sensirion. Poprzez układ SGP40 moduł dokonuje pomiaru...
AMIS-30543 - sterownik silnika krokowego 30V/3A SPI - Pololu 2970
Sterownik silnika krokowego zasilany napięciem z zakresu od 6 V do 35 V, przy maksymalnym poborze prądu 3 A na cewkę. Maksymalna rozdzielczość wynosi 1/128 kroku. Moduł pozwala...
Filament Print-Me EcoLine PLA 1,75mm 0,25kg - Neon Red
Filament wykonany z materiału EcoLine PLA to wkład w kolorze Neon Red do drukarek 3D, pracujących w technologii FDM . Masa netto nawiniętego na szpulę filamentu wynosi 250 g....

Silnik HP 75:1 obustronny wał - Pololu 2215
Miniaturowy silnik wysokiej mocy firmy Pololu z przekładnią 75:1, posiada 400 obr/min, moment obrotowy wynosi 1,6 kg*cm (0,15 Nm). Posiada przedłużony wał, umożliwiający...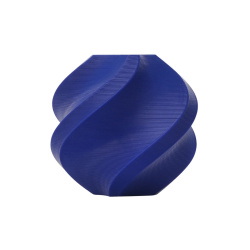
Filament Bambu Lab Refill PETG-HF 1,75mm 1kg - Blue
Filament Refill w kolorze niebieskim od Bambu Lab, wykonany z materiału PETG-HF , zoptymalizowany pod kątem druku 3D z dużą prędkością . Wyjątkowa formuła zapewnia gładką,...
Silnik 25Dx50L HP z przekładnią 20,4:1 6V 480RPM - Pololu 1572
Silnik firmy Pololu z przekładnią 20.4:1, generuje 480 obr/min, moment obrotowy wynosi 2,6 kg*cm (0,25 Nm). Zasilany napięciem 6 V, średni pobór prądu to ok. 450 mA (maks. 6000...
Silnik 25Dx56L HP z przekładnią 172:1 6V 57RPM - Pololu 1577
Silnik firmy Pololu z przekładnią 172:1, generuje 57 obr/min, moment obrotowy wynosi 18,7 kg*cm (1,8 Nm). Zasilany napięciem 6 V, średni pobór prądu to ok. 450 mA (maks. 6000...
Silnik z przekładnią 25Dx54L HP 75:1 6V 130RPM + enkoder CPR 48 - Pololu 4806
Silnik wysokiej mocy z przekładnią 75:1, 130 obr/min, moment obrotowy 9,4 kg*cm (0,93 Nm). Urządzenia posiada enkoder kwadraturowy o rozdzielczości 48 impulsy na obrót (po...
Firebeetle M0 - płytka rozwojowa - ATSAMD21G18 - DFRobot DFR0652
Moduł Firebeetle M0 w postaci płytki rozwojowej wyprodukowany przez DFRobot. Zawiera układ ATSAMD21G18 z procesorem ARM Cortex M0+ o częstotliwości taktowania 48 MHz....

Silnik z przekładnią 25Dx48L HP 9.7:1 6V 990RPM + enkoder CPR 48 - Pololu 2271
Silnik z serii Pololu High-Power z przekładnią 9.68 : 1, 990 obr/min, moment obrotowy 2,8 kg*cm (0,27 Nm). Średni pobór prądu wynosi: 550 mA, maksymalny do 6,5 A. Urządzenia...
Taśma aluminiowa EMI z klejem 40mm x 40m
Taśma aluminiowa z klejem wykorzystywana do ekranowania obudów urządzeń elektronicznych. Izoluje pole magnetyczne i zakłócenia związane z nim - EMI. Może być stosowana również...
Sonda wodoodporna z czujnikiem DS18B20 - 0,95 m - DFRobot DFR0198
Czujnik temperatury DS18B20 zamknięty w szczelnej obudowie, pozwala na pomiar temperatury miejsc oddalonych od głównego kontrolera lub w mokrych warunkach. Czujnik mierzy...
G2 High-Power 18v25 - jednokanałowy sterownik silnika 30V/25A - Pololu 2994
Jednokanałowy wydajny sterownik silnika prądu stałego DC. Ciągły prąd na kanał wynosi 25 A (chwilowy nawet do 100 A), napięcie zasilanie silników od 6,5 V do 30 V, napięcie...
Silnik HP 15:1 obustronny wał - 6V - Pololu 4785
Wydajny silnik firmy Pololu o niewielkich wymiarach z przekładnią 15:1 . Prędkość obrotowa silnika wynosi 2000 obr/min , natomiast moment obrotowy wynosi 0,3 kg*cm (0,029...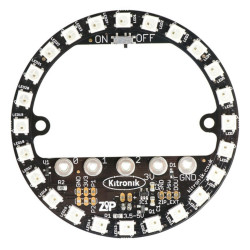
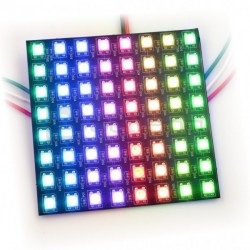
Pierścień LED RGB dla BBC micro:bit - Kitronik 5625
Płytka rozszerzeń dla BBC micro:bit wyposażona w pierścień LED RGB zbudowany z 24 indywidualnie adresowanych diod WS2812B . Napięcie zasilania wynosi od 3,5 V do 5 V ....Zobacz również