

















































































































































































































































































- Nowość!
- Darmowa dostawa

Płyta akrylowa PMMA - 3mm - 400x600mm - Milk Chocolate - 1szt.


Płyta akrylowa PMMA - 3mm - 400x600mm - Glitter Silver - 1szt.


Produkty, których sprzedaż została zakończona.

Sharp GP2Y0D810Z0F - cyfrowy czujnik odległości 10cm - Pololu 1135
Cyfrowy czujnik odległości Sharp GP2Y0D810Z0F wykrywający obiekty w odległości do 10 cm.
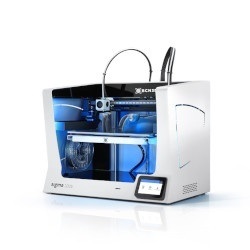
Drukarka 3D - Oryginalna Prusa MINI+ - zestaw do uproszczonego montażu
Oryginalna drukarka 3D uznanego producenta, firmy Prusa. Urządzenie wykorzystuje technologię przyrostową FFF/FDM. W Prusa MINI+ zastosowano nowoczesną 32 bitową płytę główną...
Drukarka 3D - Oryginalna Prusa MINI+ - zestaw do samodzielnego montażu
Drukarka 3D, której producentem jest Prusa. W urządzeniu zastosowano 32 bitową płytę główną z cichymi sterownikami silników krokowych Trinamic 2209 oraz złączem komunikacyjnym...
Drukarka 3D - Bambu Lab X1 Carbon Combo
Bambu Lab X1 Carbon to prawdziwy powiew świeżości w branży druku 3D. Jej stabilna konstrukcja o kinematyce CoreXY umożliwia pracę w bardzo dużych prędkościach, bo aż do 500...
Bambu Lab X1 Carbon - Drukarka 3D
Bambu Lab X1 Carbon to prawdziwy powiew świeżości w branży druku 3D. Jej wyjątkowo stabilna konstrukcja o kinematyce CoreXY umożliwia pracę w bardzo dużych prędkościach, bo...
Drukarka 3D - Original Prusa XL - 1 głowica - zestaw do samodzielnego montażu
Original Prusa XL to zaawansowana drukarka 3D typu CoreXY z przestrzenią roboczą o wymiarach 360 x 360 x 360 mm . Posiada jedną głowicę, ale umożliwia drukowanie...
Drukarka 3D - Original Prusa XL - 5 głowic - zestaw do samodzielnego montażu
Original Prusa XL to zaawansowana drukarka 3D typu CoreXY z przestrzenią roboczą o wymiarach 360 x 360 x 360 mm , umożliwiająca drukowanie wielomateriałowe przy użyciu...
Drukarka 3D - Original Prusa XL - 2 głowice - zestaw do samodzielnego montażu
Original Prusa XL to zaawansowana drukarka 3D typu CoreXY z przestrzenią roboczą o wymiarach 360 x 360 x 360 mm . Posiada dwie głowice i możliwość drukowania...
Drukarka 3D - Original Prusa XL - 2 głowice - Enclosure Bundle - zestaw do samodzielnego montażu
Original Prusa XL z obudową to zaawansowana, częściowo zmontowana drukarka 3D typu CoreXY , oferująca pole robocze o wymiarach 360 x 360 x 360 mm . Posiada dwie głowice i...
Drukarka 3D - Original Prusa XL - 5 głowic - Enclosure Bundle - zestaw do samodzielnego montażu
Original Prusa XL z oficjalną obudową to zaawansowana drukarka 3D w architekturze CoreXY , dostarczana w wersji częściowo zmontowanej . Oferuje przestrzeń roboczą 360 x...
Triak BT138-600E 600V/12A - THT - 5szt.
Napięcie Vdrm: 600 V. Prąd It: 12 A. Prąd bramki Ig: maks. 25 mA. Obudowa: TO220.
Silnik wibracyjny 10 x 3,0 mm C1030B015F
Mały silnik generujący wibracje z prędkością obrotową 1000 obr/min. Pobiera około 100 mA prądu przy zasilaniu napięciem 3 V.
Akumulator Li-Pol Dualsky 300mAh 25C 1S 3.7V
Wydajny akumulator litowo-polimerowy Dualsky. Napięcie nominalne 3,7 V. Prąd rozładowania: ciągły 25 C (7,5 A), chwilowy 50 C (15 A). Wymiary 45 x 20 x 7 mm z wtyczką. Masa 8 g.
Złącze żeńskie ZIF, FFC/FPC, poziome 30 pin, raster 0,5 mm, górny kontakt
Złącze FFC/FPC 30 pin, poziome, raster 0,5 mm, górny kontakt, lutowane powierzchniowo (SMD).
Rezystor THT CF węglowy 1/4W 47kΩ - 30szt.
Zestaw 30 rezystorów o mocy 1/4 W . Elementy w obudowie przewlekanej THT.
Rezystor THT CF węglowy 1/4W 56kΩ - 30szt.
Zestaw 30 rezystorów o mocy 1/4 W. Elementy w obudowie przewlekanej THT.
Nakładka VESA do obudów TEKO do Raspberry - przezroczysta
Przezroczyta nakładka przystosowana do montażu VESA (montaż obudowy w tylnej części telewizora, monitora). Pozwala zamontować Raspberry w obudowie z serii TEKO na monitorze.
Listwa montażowa żeńska, 5-pinowa, raster 3,5mm
Listwa zaciskowa rozłączalna, żeńska, 4-pinowa. Komponent przeznaczony do montażu na płytkach drukowanych i innych systemach elektronicznych. Dzięki swojej konstrukcji...
Listwa montażowa męska, 3-pinowa, raster 3,5mm, pionowa, zabudowana
Listwa zaciskowa rozłączalna, męska, 3-pinowa. Raster 3,5 mm. Wysokość 9,20 mm. Niezawodne rozwiązanie do łączenia przewodów w różnorodnych projektach elektronicznych i...
Listwa montażowa męska, 5-pinowa, raster 3,5mm, pionowa, zabudowana
Listwa zaciskowa rozłączalna, męska, 5-pinowa . Raster 3,5 mm. Wysokość 9,20 mm.
Listwa montażowa męska, 2-pinowa, raster 3,5mm, kątowa, zabudowana
Listwa zaciskowa rozłączalna, męska, kątowa, 2-pinowa . Raster 3,5 mm. Wysokość 9,20 mm.
Listwa montażowa męska, 3-pinowa, raster 3,5mm, kątowa, zabudowana
Listwa zaciskowa rozłączalna, męska, kątowa, 3-pinowa . Raster 3,5 mm. Wysokość 9,20 mm.
Listwa montażowa żeńska, 3-pinowa, raster 5,08mm, stalowa klatka
Listwa zaciskowa rozłączalna, żeńska, 3-pinowa . Raster 5,08 mm. Wysokość 15,1 mm. Śruba na wkrętak płaski (-).
Listwa montażowa męska, 8-pinowa, raster 5,08mm, pionowa, zabudowana
Listwa zaciskowa rozłączalna, męska, 8-pinowa. Raster 5,08 mm. Wysokość 11 mm.Zobacz również