

















































































































































































































































































Przewód zasilający ósemka CEE 7/16/IEC C7 - 3m biały - Akyga AK-RD-07A
Indeks: RCO-27946
- Nowość!
- Darmowa dostawa
Przewód zasilający ósemka CEE 7/16/IEC C7 - 3m biały - Akyga AK-RD-07A

Filament Rosa3D Refill PLA Starter 1,75mm 1kg - Light Brown

Pakiet filamentów Refill Bambu Lab - Mega Pack Premium PLA - 10szt.




Siłownik elektryczny LD1 32N 30mm/s 12V - wysuw 10cm

Siłownik elektryczny LA50 2000N 50mm/s 12V - wysuw 15cm
Obudowa do Raspberry Pi Zero x2 - Mini Cluster - otwarta - PiHut TPH-067


Siłownik elektryczny LA50 1500N 100mm/s 12V - wysuw 30cm
Produkty, których sprzedaż została zakończona.

Sharp GP2Y0D810Z0F - cyfrowy czujnik odległości 10cm - Pololu 1135
Cyfrowy czujnik odległości Sharp GP2Y0D810Z0F wykrywający obiekty w odległości do 10 cm.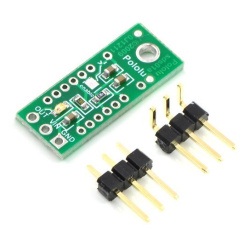
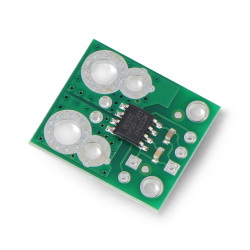
Podstawka pod cyfrowy czujnik Sharp - Pololu 1133
Podstawka PCB ułatwia połączenie cyfrowego czujnika odległości Sharp z modułem głównym projektu.
Mikrokontroler AVR - ATmega128A-AU SMD
Popularny mikrokontroler ATmega128A-AU z rodziny AVR firmy ATmel w obudowie lutowanej powierzchniowo (SMD).
Kondensator elektrolityczny 1uF/50V 5x11mm 105C THT - 10szt.
Kondensator elektrolityczny przewlekany 1 uF / 50 V. Raster wyprowadzeń: 2,5 mm. Rozmiar Ø5 x 11mm. Cena za 10 sztuk.
Wtyk miniUSB typu B na przewód
Wtyk mini USB typ B do lutowania przewodów zawierający 5 styków w obudowie metalowej.
Czujnik dymu i łatwopalnych gazów MQ-2 - półprzewodnikowy
Czujnik dymu i łatwopalnych gazów z wyjściem analogowym.
Pakiet Li-Pol Dualsky 520mAh 25C 2S 7,4V
Wydajny akumulator litowo-polimerowy Dualsky. Prąd rozładowania: ciągły 25 C (13 A), chwilowy do 40 C (20,8 A). Wymiary: 58 x 18 x 14 mm. Masa: 25,6 g.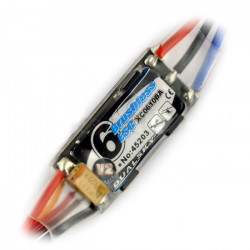
Sterownik silnika bezszczotkowego (BLDC) Dualsky 6A v2
Regulator obrotów zasilany napięciem 12 V i wydajności prądowej 6A od firmy Dualsky do silników bezszczotkowych 3-fazowych.
Rzep samoprzylepny 50x30 mm 5-pak
Pięć sztuk rzepów samoprzylepnych o wymiarach 50 x 30 mm przydatnych do mocowania baterii, odbiorników, regulatorów itp. w robotach lub modelach RC.

Rzep samoprzylepny 70x30 mm 5-pak
Pięć sztuk rzepów samoprzylepnych o wymiarach 70 x 30 mm przydatnych np. do mocowania baterii, odbiorników, regulatorów itp. w robotach lub modelach RC.
Serwo Hitec HS-322HD - standard
Wydajne serwo firmy Hitec, posiada karbonowe tryby o podwyższonej wytrzymałości. Prędkość: 0,15 s/60°. Moment: 3,7 kg*cm. Wymiary: 41 x 20 x 37 mm. Masa: 43 g.
Miniwiertarka Velleman VTHD05 z akcesoriami
Miniwiertarka z akcesoriami. Prędkość obrotowa: regulacja 10000 – 32000 obr/min. Zasilanie: 230V AC. Moc: 135W. W zestawie także 160 różnych akcesoriów.
Stacja lutownicza WEP 936 - 40W
Grotowa stacja lutownicza WEP 936 o mocy 40 W. Posiada regulowaną temperaturę w zakresie od 200 °C od 480 °C .
Zasilacz laboratoryjny WEP PS-305D II 30V 5A
Zasilacz laboratoryjny PS-305D II z płynną regulacją napięcia w zakresie od 0 do 30 V oraz prądu w zakresie od 0 do 5 A.
Stacja lutownicza 2w1 hotair i grotowa WEP 872D kompresor - 660W
Lutownica grotowa oraz gorące powietrze (hotair) w jednym. Moc całkowita to 660 W. Urządzenie posiada płynną regulację temperatury oraz dwa wyświetlacze LED. Stacja posiada...
Mikrokontroler AVR - ATmega88PA-AU SMD
Popularny mikrokontroler z rodziny AVR firmy ATmel w obudowie lutowanej powierzchniowo (SMD).
Przewód zasilający z gniazdem mini Tamiya
Przewód zasilający z gniazdem mini Tamiya.
Gniazdo do karty pamięci micro SD uSD589
Złącze - gniazdo do karty pamięci micro SD z klapką.
Stacja lutownicza 2w1 hotair i grotowa WEP 852D+ z wentylatorem w kolbie
Lutownica grotowa oraz gorące powietrze (hotair) . Urządzenie posiada płynną regulację temperatury oraz dwa wyświetlacze LED. System ESD Safe zapewnia bezpieczeństwo dla...
Dioda LED SMD 0603 zielona - 10szt.
Dioda LED w obudowie SMD 0603 zielona. Cena za 10 sztuk.
Akumulator Li-Pol Dualsky 150mAh 30C 1S 3.7V
Wydajny akumulator litowo-polimerowy Dualsky. Prąd rozładowania: ciągły 30 C (4,5 A), chwilowy 50 C (7,5 A), masa 4 g, wymiary 37 x 12 x 6 mm.
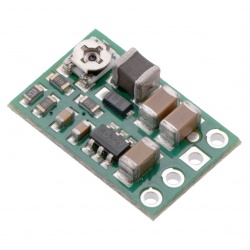
D24V3F12 - przetwornica step-down 12V 0,3A - Pololu 2100
Przetwornica typu step-down o napięciu wyjściowym 12 V. Maksymalny prąd do 300 mA. Napięcie zasilania w zakresie 14 V - 42 V.
Serwo Hitec HS-485HB Deluxe - standard
Mocne serwo typu standard posiada karbonowe tryby o podwyższonej wytrzymałości. Prędkość: 0,18 s/60 ° . Moment: 6 kg. Wymiary: 39 x 20 x 38 mm. Masa: 45 g.Zobacz również