




















































































































































































































































































































































































































Czujniki 9DoF IMU - Podobnie jak ludzie, także roboty „lubią” znać swoje położenie i wiedzieć, co się z nimi dzieje. Technologia MEMS przyniosła w ostatnim dziesięcioleciu szereg narzędzi, które pozwalają zbudować elektroniczny odpowiednik błędnika. Jego zadaniem jest informowanie robota o jego orientacji w przestrzeni oraz parametrach ruchu – przyspieszeniu i prędkości. Miernik IMU korzysta z danych pochodzących z trzech różnych czujników.

Czujnik siły nacisku - 20kg okrągły 7,5mm - Joy-IT SEN-Pressure20
Indeks: SEG-28592
- Nowość!
- Darmowa dostawa
- Nowość!
- Darmowa dostawa

- Nowość!
- Darmowa dostawa

eufyMake B Film - folia transferowa do drukarki UV eufyMake E1 - 30m
Indeks: ABB-28957
- Nowość!
- Darmowa dostawa
- Nowość!
- Darmowa dostawa

- Wyprzedaż
- Darmowa dostawa
- Wyprzedaż

Siłownik elektryczny CAR+ 1000N 10mm/s 12V - wysuw 30cm
Indeks: ELB-19960
- Obniżka
- Darmowa dostawa
- Wyprzedaż

LattePanda V1 - 4GB + 64GB EEMC Intel Quad-Core WiFi - Windows 10
Indeks: DFR-09376
- Wyprzedaż
- Darmowa dostawa
- Wyprzedaż

Zamel Supla ROW-07 - 7x przekaźnik 230V WiFi - aplikacja Android/iOS
Indeks: ZML-26628
- Wyprzedaż
- Darmowa dostawa
- Wyprzedaż

Pilot IR Argon do obudów Argon One V2 i M.2 - B20-008-AR-RMT
Indeks: ARG-19314
- Obniżka
- Darmowa dostawa
- Wyprzedaż

- Obniżka
- Darmowa dostawa
- Wyprzedaż

Siłownik elektryczny LA10P 500N 13mm/s 12V z potencjometrem - wysuw 5cm
Indeks: WLS-17098
- Obniżka
- Darmowa dostawa
- Wyprzedaż
Czujniki 9DoF IMU
Ilość produktów: 24
Loading...

6-osiowy czujnik ruchu - akcelerometr i żyroskop - DFRobot SEN0386
Wydajny 6-osiowy czujnik łączący w sobie akcelerometr i żyroskop. Pozwala określić położenie obiektu w przestrzeni , zmierzyć prędkość przyśpieszenia oraz prędkość kątową...
Indeks: DFR-19014
Indeks: DFR-19014
- Darmowa dostawa

Grove - 6-osiowy akcelerometr i żyroskop LSM6DS3 - Seeedstudio 105020012
Moduł wyposażony w 6-osiowy akcelerometr i żyroskop oparty o układ LSM6DS3 z wbudowanym regulatorem zasilania. Pozwala na pomiar 6 wielkości: przyspieszenia X, Y, Z oraz...
Indeks: SEE-15559
Indeks: SEE-15559
- Darmowa dostawa

Czujnik środowiskowy I2C - do Raspberry Pi Pico - Waveshare 20232
Moduł przeznaczony do Raspberry Pi Pico wyposażony w całą gamę przydatnych czujników środowiskowych . Wyprodukowany przez Waveshare, zawiera w sobie czujnik temperatury,...
Indeks: WSR-20085
Indeks: WSR-20085
- Darmowa dostawa
SparkFun 6 DoF IMU - ISM330DHCX - 3-osiowy akcelerometr i żyroskop - SparkFun SEN-19764
Płytka wyposażona w układ ISM330DHCX zawierający 3-osiowy akcelerometr oraz 3-osiowy żyroskop. Moduł pozwala na pomiar przyspieszenia liniowego w zakresie ± 2 / ± 4 / ± 8 / ±...
Indeks: SPF-21821
Indeks: SPF-21821
- Darmowa dostawa

ISM330DHCX 6DoF IMU - 3-osiowy akcelerometr i żyroskop - Adafruit 4502
Czujnik DoF ISM330DHCX wyposażony w 3-osiowy akcelerometr oraz 3-osiowy żyroskop. Służy do pomiaru przyspieszenia liniowego w zakresach ± 2 / ± 4 / ± 8 / ± 16 g oraz...
Indeks: ADA-16458
Indeks: ADA-16458
- Darmowa dostawa

MinIMU-9 v6 - moduł z akcelerometrem i magnetometrem - LSM6DSO i LIS3MDL - Pololu 2862
MinIMU-9 v6 to jednostka pomiarowa (IMU), która zawiera 3-osiowy żyroskop , akcelerometr LSM6DSO oraz magnetometr LIS3MDL. Wszystkie te elementy umieszczone zostały na...
Indeks: PLL-23639
Indeks: PLL-23639
- Darmowa dostawa

Moduł z rodziny Feather . Czujnik jest połączeniem akcelerometru, żyroskopu i magnetometru . Pozwala na pomiar przyśpieszeń, prędkości kątowej oraz pola magnetycznego w...
Indeks: ADA-17767
Indeks: ADA-17767
- Darmowa dostawa
LSM6DS3TR-C + LIS3MDL 9DOF IMU - akcelerometr, żyroskop i magnetometr I2C - Adafruit 5543
Czujnik oparty na układzie ST LSM6DS3TR-C , popularnym akcelerometrze 6-DoF IMU z żyroskopem. Umożliwia pomiar przyspieszenia (3-osiwy akcelerometr) oraz orientacji...
Indeks: ADA-21824
Indeks: ADA-21824
- Darmowa dostawa
LSM9DS1 9DoF IMU - 3-osiowy akcelerometr, żyroskop i magnetometr I2C/SPI - Adafruit 3387
Czujnik jest połączeniem 3-osiowego cyfrowego żyroskopu, akcelerometru i kompasu. Pozwala na pomiar przyspieszeń, pola magnetycznego oraz prędkości kątowej w konfigurowalnych...
Indeks: ADA-08441
Indeks: ADA-08441
- Darmowa dostawa

AltIMU-10 v6 od Pololu to zaawansowana jednostka pomiarowa i wysokościomierz , łączący w sobie również żyroskop, akcelerometr LSM6DSO, magnetometr LIS3MDL oraz barometr...
Indeks: PLL-23635
Indeks: PLL-23635
- Darmowa dostawa

Czujnik składa się z 3-osiowego akcelerometru, żyroskopu i magnetometru. Może działać jako system AHRS. Wykorzystuje rozszerzony filtr Kalmana do wyliczenia parametrów lotu. Ta...
Indeks: PLL-07620
Indeks: PLL-07620
- Darmowa dostawa
Czujnik środowiskowy - nakładka do Raspberry Pi - Waveshare 20471
Czujnik środowiskowy w postaci nakładki do Raspberry Pi wyposażony w szereg przydatnych sensorów. Posiada wbudowany czujnik temperatury , wilgotności , ciśnienia...
Indeks: WSR-20550
Indeks: WSR-20550
- Darmowa dostawa

BNO085 9-DOF IMU Fusion Breakout - 3-osiowy akcelerometr, żyroskop i magnetometr - Adafruit 4754
Czujnik oparty na układzie BNO085 wyposażony w akcelerometr, magnetometr oraz żyroskop. Umożliwia pomiar przyspieszenia, orientacji przestrzennej, a także tego skąd pochodzi...
Indeks: ADA-22113
Indeks: ADA-22113
- Darmowa dostawa

SparkFun 6DoF IMU Breakout - BMI270 - 3-osiowy akcelerometr i żyroskop - Qwiic - SparkFun SEN-22397
SparkFun 6DoF IMU Breakout to moduł czujnika inercyjnego z układem BMI270 . Posiada 3-osiowy akcelerometr i żyroskop, które umożliwiają precyzyjne śledzenie ruchu i...
Indeks: SPF-23480
Indeks: SPF-23480
- Darmowa dostawa
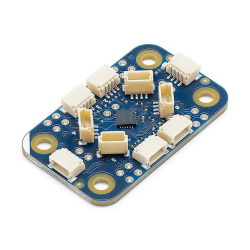
Arduino Modulino Movement - 6-osiowy IMU - akcelerometr i żyroskop - LSM6DSOXTR - Qwiic - ABX00101
Modulino Movement ABX00101 to kompaktowy moduł czujnika ruchu z żyroskopem i akcelerometrem , umożliwiający pomiar przyspieszeń oraz rotacji w trzech osiach . Dzięki...
Indeks: ARD-26942
Indeks: ARD-26942
- Darmowa dostawa

Fermion - akcelerometr i żyroskop ICG-20660L - I2C/SPI - DFRobot SEN0443
Moduł wyposażony w 6-osiowy układ IMU ICG-20660L o wysokiej precyzji, który integruje w sobie 3-osiowy akcelerometr (± 2 / 4 / 8 / 16 g) oraz 3-osiowy żyroskop (± 125 /...
Indeks: DFR-20680
Indeks: DFR-20680
- Darmowa dostawa
SparkFun Micro 6DoF IMU Breakout to kompaktowy moduł rozwojowy oparty na chipie LSM6DSV16X . Jest to urządzenie o małych wymiarach, które oferuje funkcje akcelerometru i...
Indeks: SPF-23324
Indeks: SPF-23324
- Darmowa dostawa

LSM6DSO - 3-osiowy akcelerometr i żyroskop I2C/SPI - SparkFun SEN-18020
Płytka z układem 6DoF LSM6DSO zawierającym akcelerometr oraz żyroskop wraz z buforem FIFO 9 kB i funkcjami przerwania przetwarzania wbudowanego. Urządzenie pozwala wykryć...
Indeks: SPF-19708
Indeks: SPF-19708
- Darmowa dostawa

SparkFun Micro 6DoF IMU - BMI270 - 3-osiowy akcelerometr i żyroskop - Qwiic - SparkFun SEN-22398
SparkFun Micro 6DoF IMU Breakout to kompaktowa płytka, wyposażona w akcelerometr i żyroskop , które służą do precyzyjnego śledzenia ruchu i orientacji. Moduł zawiera...
Indeks: SPF-23481
Indeks: SPF-23481
- Darmowa dostawa

MinIMU-9 v5 9DOF - akcelerometr, żyroskop i magnetometr I2C - Pololu 2738
Czujnik pozwala na pomiar 9 wielkości: przyspieszenia X, Y, Z, pola magnetycznego X, Y, Z oraz prędkości kątowej X, Y, Z. Jest połączeniem 3-osiowego akcelerometru i żyroskopu...
Indeks: PLL-05528
Indeks: PLL-05528
- Darmowa dostawa

ICM-20948 9DoF - 3 osiowy akcelerometr, żyroskop i magnetometr SPI/I2C Qwiic - Adafruit 4554
Moduł firmy Adafruit jest połączeniem 3-osiowego żyroskopu, akcelerometru i kompasu. Umożliwia pomiar przyspieszeń, pola magnetycznego oraz prędkości kątowej. Zakresy...
Indeks: ADA-17709
Indeks: ADA-17709
- Darmowa dostawa
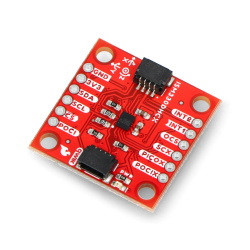
Czujnik 9DoF IMU Breakout - ISM330DHCX, MMC5983MA - Qwiic - SparkFun SEN-19895
SparkFun czujnik Qwiic 9DoF IMU Breakout łączy w sobie wysokowydajny cyfrowy akcelerometr ISM330DHCX , żyroskop oraz bardzo czuły magnetometr trójosiowy MMC5983MA ....
Indeks: SPF-21961
Indeks: SPF-21961
- Darmowa dostawa

SparkFun 6DoF IMU Breakout LSM6DSV16X Qwiic to zaawansowany moduł czujnika inercyjnego, który posiada wbudowany akcelerometr i żyroskop i oferuje precyzyjne wykrywanie ruchu...
Indeks: SPF-23323
Indeks: SPF-23323
- Darmowa dostawa

VR IMU Breakout - moduł VR z czujnikiem IMU - BNO086 - Qwiic - SparkFun SEN-22857
VR IMU Breakout od SparkFun to moduł z czujnikiem IMU przeznaczony do zastosowania w obszarze wirtualnej rzeczywistości (VR). Został wyposażony w wydajny układ BNO086...
Indeks: SPF-23839
Indeks: SPF-23839
- Darmowa dostawa
Zobacz również
- PRZYSPIESZENIOMIERZE
- Czujniki alarmowe
- CZUJNIK CIŚNIENIA ARDUINO
- Czujniki czystości powietrza
- Czujniki dźwięku
- Czujniki gestów
- WYŁĄCZNIKI KRAŃCOWE
- Czujniki gazów
- System Grove
- System Gravity
- CZUJNIK OŚWIETLENIA
- SENSORY MAGNETYCZNE
- Czujniki medyczne
- TENSOMETRY
- Czujniki odbiciowe
- SENSORY ODLEGŁOŚCI
- CZUJNIKI INDUKCYJNE
- Czujniki pogodowe
- Czujniki poziomu cieczy
- MIERNIKI NATĘŻENIA PRĄDU
- CZUJNIKI PRZEPŁYWU CIECZY
- DETEKTORY RUCHU
- sensory temperatury
- PT100
- Czujniki wilgotności
- Czytniki linii papilarnych
- Enkodery
- Fotorezystory
- Fototranzystory
- CZUJNIKI PODCZERWIENI
- Magnetometry
- ŻYROSKOPY ELEKTRONICZNE ARDUINO
- Zestawy czujników
- Czujniki drzwiowe
- Czujniki hallotronowe
- Czujniki obrotów
- Czujniki optyczne
- Czujniki przechyłu
- Czujniki rezystancyjne
- Czujniki indukcyjne
- Czujniki piezoelektryczne
- Czujniki tlenu
- Czujniki zmierzchu
Czujniki 9DoF IMU
Pomiar za pomocą jednostki nawigacji inercyjnej IMU (ang. Intertial Measurement Unit) odbywa się poprzez połączenie danych:
- akcelerometru - czujnika przyspieszenia,
- żyroskopu – czujnika prędkości obrotowych i położenia względem ziemi,
- magnetometru – czujnika pola magnetycznego.
O ile pojedynczy czujnik nie byłby w stanie zapewnić wystarczającej informacji o położeniu obiektu, połączenie (tzw. fuzja) danych różnego rodzaju pozwala na niezawodne i precyzyjne wyznaczenie orientacji i parametrów ruchu w przestrzeni trójwymiarowej.
Zastosowania czujników IMU
W jakiego rodzaju urządzeniach niezbędne są opisywane czujniki? Każdy moduł IMU może pracować jako prosty inklinometr, czyli urządzenie mierzące kąt wychylenia względem wektora grawitacji. Czujnik IMU jest elementem koniecznym w konstrukcji każdego drona, ponieważ odczyty z modułu nawigacji inercyjnej stanowią podstawowe źródło informacji wejściowych dla kontrolerów lotu. Także inne rodzaje pojazdów, m.in. roboty balansujące, są całkowicie uzależnione od odczytów płynących z mierników IMU.
Mały – wielki nawigator
Pomimo zaawansowania technicznego, moduły pomiarowe 9DoF są stosunkowo małe i lekkie, co umożliwia stosowanie ich nawet w najmniejszych dronach oraz urządzeniach przenośnych. Atrakcyjna jest także cena mierników IMU, gdyż moduły można kupić już za kilkadziesiąt złotych. Komunikację z mikrokontrolerem lub pokładowym kontrolerem lotu zapewnia szeregowy interfejs I2C lub SPI, w niektórych modelach dostępny jest także UART. Popularność wszystkich tych standardów komunikacyjnych sprawia, że moduły czujników IMU dostępne w naszym sklepie są w stanie „dogadać się” z dowolnym, nawet najprostszym mikrokontrolerem (w tym arduino). Co bardzo istotne, parametry nawigacyjne są wyliczane automatycznie. Takie rozwiązanie zwalnia nas z obowiązku implementacji złożonych obliczeń matematycznych, bazujących na filtracji Kalmana i złożonej algebrze macierzowej.