

























































































































































































































































































































































































- Nowość!
- Darmowa dostawa



Magnes neodymowy okrągły z warstwą klejącą 10x1mm - 10szt.


Pakiet 12 miesięczników - Zrozumieć Elektronikę 2024


PowerHD HD-1900MG micro - serwomechanizm analogowy

Moduł głowicy laserowej do Snapmaker Artisan - 40W

Stacja lutownicza 2w1 hotair i grotowa WEP 992D


Air Assist - pompa powietrza do plotera laserowego TOOCAA L2

STOP:bit - Światła drogowe dla BBC micro:bit - Kitronik 5642

Siłownik elektryczny LA10 500N 13mm/s 12V - wysuw 5cm

Magistrala CAN (Controller Area Network - Can Bus) to urządzenie pozwalające na dwukierunkową komunikację między mikroprocesorami. Mówiąc inaczej, jest to szeregowa magistrala komunikacyjna, która powstała przede wszystkim po to, aby wspierać takie systemy jak ABS czy sterowanie silnikiem w czasie rzeczywistym. Wysoka niezawodność, duża prędkość przesyłu danych i popularność magistrali CAN przyczyniła się jej rozwoju i szerszego zastosowania. Obecnie wykorzystywana jest w nowoczesnych samochodach osobowych, w budownictwie i w automatyce przemysłowej. Szyna CAN to rozwiązanie stosowane szeroko w bardziej rozbudowanych projektach.
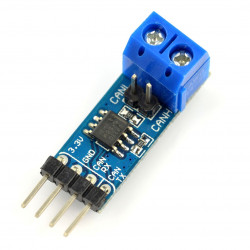
Moduł z interfejsem CAN - SN65HVD230 - Waveshare 3945
Moduł oparty na układzie SN65HVD230 pozwalający połączyć mikrokontroler do magistrali CAN. Układ jest zgodny z pinoutem układu PCA82C250. Moduł zasilany jest napięciem 3,3 V...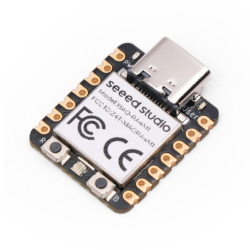
Seeed Xiao RA4M1 - ARM Cortex M4 - Seeedstudio 102010551
Xiao RA4M1 to kompaktowa płytka rozwojowa z 32-bitowym mikrokontrolerem Renesas RA4M1 (ARM Cortex M4, 48 MHz). Oferuje 256 kB pamięci Flash, 32 kB SRAM, 8 kB EEPROM . Zawiera...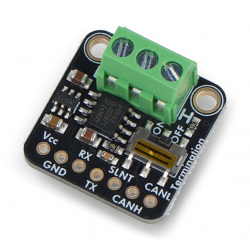
Moduł CAN Bus - TJA1051T/3 - Adafruit 5708
Moduł oparty na układzie TJA1051T/3 , umożliwiający połączenie mikrokontrolera z dowolnym rozszerzeniem komunikującym się poprzez magistralę CAN . Moduł zasilany jest...
CAN-Bus Shield v2.0 DFRobot - nakładka na Arduino
Nakładka na Arduino umożliwiająca korzystanie z magistrali szeregowej CAN. Wyposażona w układy MCP2515. Posiada złącze kart microSD. Działa z napięciem od 3,3 V do 5 V.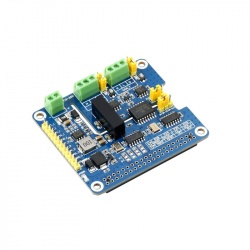
CAN FD Expansion HAT - 2-kanałowa izolowana nakładka CAN FD - do Raspberry Pi - Waveshare 17075
CAN FD Expansion HAT to wyprodukowana przez Waveshare nakładka rozszerzająca magistralę CAN . Obsługuje oryginalny protokół CAN 2.0 oraz rozszerzenie CAN FD o wyższej...
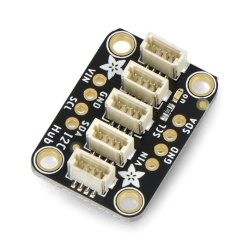
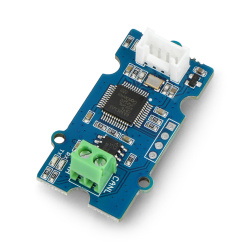
Grove - moduł CAN Bus - I2C - Seeedstudio 113020111
Moduł MCP2551 i MCP2515 I2C CAN-BUS umożliwiający wykorzystanie Arduino do komunikacji z magistralą CAN-BUS w celu np. diagnostyki pojazdu (układ współpracuje z interfejsem...
Moduł CAN Bus do Xiao i QT Py - MCP2515 - SN65HVD230 - Seeedstudio 105100001
Płytka rozszerzeniowa dla mikrokontrolerów Seeed Xiao , umożliwiająca komunikację za pomocą protokołu CAN Bus. Wykorzystuje kontroler MCP2515 i transceiver SN65HVD230 ,...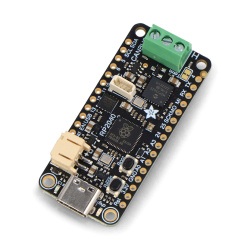
Grove - moduł CAN Bus - GD32E103 - Seeedstudio 114992978
Moduł oparty na układzie GD32E103 , który pozwala połączyć mikrokontroler z magistralą CAN . Pozwala na wykorzystanie Arduino w celu komunikacji z magistralą CAN-BUS w celu...
RS485/CAN Shield - nakładka do Arduino - Waveshare 10771
Nakładka pozwalająca podłączyć Arduino do interfejsu RS485 lub magistrali CAN. Wyposażona w sterowniki: MAX3485 oraz SN65HVD230 dla CAN, współpracuje z płytkami Uno, Leonardo,...

CAN Bus BFF Add-On - moduł CAN Bus - MCP25625 - SPI - do QT Py i Xiao - Adafruit 5877
Adafruit CAN Bus BFF Add-On to praktyczna nakładka, która umożliwia dodanie funkcjonalności komunikacji w standardzie CAN Bus do płytek QT Py oraz Xiao . Moduł wykorzystuje...
Gravity - moduł komunikacyjny CAN-TTL - z protokołem SLCAN - DFRobot TEL0150
Konwerter z CAN na UART i USB od DFRobot obsługuje napięcie od 3,3 V do 5 V . Poprzez wysyłanie prostych poleceń AT , możesz prowadzić transmisję danych CAN i konfigurować...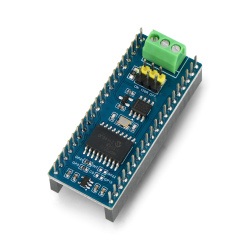
Nakładka CAN Bus do Raspberry Pi Pico - Waveshare 23775
Moduł od firmy Waveshare umożliwiający komunikację dalekiego zasięgu CAN Bus przeznaczony do Raspberry Pi Pico . Wyposażony został w sterownik CAN MCP2515 z interfejsem SPI...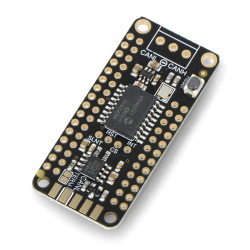
Moduł CAN Bus - MCP2515 - SPI - nakładka dla Feather - Adafruit 5709
Moduł wyprodukowany przez firmę Adafruit, umożliwiający komunikację poprzez magistralę CAN . Jest kompatybilny z płytkami z rodziny Feather. Wbudowany układ scalony MCP2515...Zobacz również
Komunikacja CAN (system CAN) stała się jednym z najpopularniejszych standardów przemysłowych sieci komunikacyjnych - w Polsce znajduje się na drugim miejscu po cenionym standarcie Profibus. Za pomocą magistrali CAN urządzenia sterujące przekazują sygnał do robotów (lub automatów).
Znakomicie sprawdza się również podczas komunikacji (transmisji danych) między sensorami, sterownikami i rejestratorami. Cechuje się stabilnością i dużą szybkością przesyłu danych, jednak należy pamiętać, że wraz z długością przewodu prędkość znacząco spada. Innymi słowy, wraz ze wzrostem odległości prędkość maleje.
Sieci CAN sprawdzają się w automatyzacji linii produkcyjnych, przy różnych systemach maszynowych, do sterowania pieców, w chłodniach czy do drukarek. Warto wiedzieć, że topologia szyna CAN to filar, na którym opiera się działanie sieci CAN.
W naszej ofercie znajdują się przede wszystkim moduły, które pozwalają w prosty sposób podłączyć Twój mikrokontroler do magistrali CAN. Do wielu zastosowań bardzo często doskonale sprawdzają się nakładki na popularne płytki (mikrokontrolery) - posiadamy szeroki wybór nakładek do Arduino.
Często komunikacja z urządzeniem odbywa się za pośrednictwem interfejsu SPI, a nakładka posiada wyprowadzone na wierzch piny mikrokontrolera. Magistrala komunikacyjna CAN nadal najczęściej wykorzystywana jest w motoryzacji - dostępna jest między innymi nakładka do Arduino, przystosowana do współpracy ze standardowym złączem samochodowym OBD-II i zawierająca instrukcję przykładowego podłączenia urządzenia. Urządzenie może być wykorzystywane m.in. do kontroli błędów i sprawdza np. czy poduszki powietrzne są aktywne.
Warto pamiętać, że podczas korzystania z magistrali CAN i płytek wykorzystującą mikroprocesory ATmega, ze względu na ich niższą wydajność, funkcjonalność magistrali będzie obniżona. Oferujemy także moduły z interfejsami CAN - komunikacja w nich odbywa się zazwyczaj za pomocą złącza USB oraz interfejsu szeregowego UART- RX, TX. W systemach Windows lub Linux pojawi się jako wirtualny port COM. W razie pytań lub wątpliwości dotyczących magistrali CAN zachęcamy do kontaktu mailowego, telefonicznego lub za pośrednictwem formularza dostępnego na stronie.
CAN jest standardem magistrali szeregowej typu multi-master do łączenia elektronicznych jednostek sterujących (ECU) zwanych również węzłami. Do komunikacji w sieci CAN wymagane są dwa lub więcej węzłów. Były stosowane między innymi w motocyklach i samochodach. Więcej informacji zamieściliśmy na Botland Blog.
CAN-BUS to oryginalna magistrala szeregowa do komunikacji pomiędzy modułami. Została stworzona przez Roberta Boscha w 1983 roku. Następnie pomysł został wdrożony m.in. przez firmy Intel i Philips, a z czasem CAN-BUS pojawił się w Mercedesach z 1991 roku.
CAN H i CAN L występują w parze. To sygnały różnicowe transceivera. Celem “testu” CANH i CAN L jest określenie fizycznej integralności magistrali CAN (Controller Area Network) przez sprawdzenie niskiego (CAN-L) i wysokiego (CAN-H) napięcia linii. Gdy transmitowany jest bit dominujący, napięcie CAN High wzrasta, natomiast CAN Low spada.




