





























































































































































































































































































































































































Moduł łączący sterownik silnika PPM z pompą perystaltyczną. Sygnał sterujący jest kompatybilny z sygnałem sterującym serwomechanizmami przez co może być używany z różnymi płytkami takimi jak naprzykład Arduino, Raspberry, micro:bit by móc dowolnie konfigurować prędkość oraz kierunek przepływu. Pompa zasilana jest napięciem 6 V.


Moduł łączący sterownik silnika PPM z pompą perystaltyczną. Sygnał sterujący jest kompatybilny z sygnałem sterującym serwomechanizmami przez co może być używany z różnymi płytkami takimi jak naprzykład Arduino, Raspberry, micro:bit by móc dowolnie konfigurować prędkość oraz kierunek przepływu. Pompa zasilana jest napięciem 6 V.
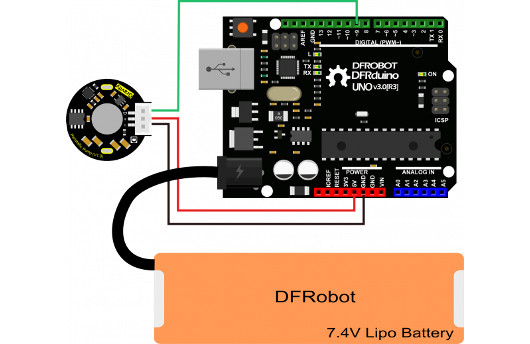
Pobór mocy silnika wynosi 5 W dlatego zaleca się użycie osobnego źródła zasilania. Port USB może zapewnić tylko 2,5 W.
Pompa perystaltyczna charakteryzuje się tym że ciecz jest przepychana przez elastyczny przewód za pomocą karbowanego paska, karbowanego wałka, toczących się rolek lub wirnika przesuwającego się po przewodzie przez co przepompowywana ciecz nie ma kontaktu z elementami pompy i jest ona w pełni szczelna, z tego powodu wykorzystuje się je w sprzęcie medycznym lub do pompowania agresywnych cieczy.

Pompę przewodową jako rodzaj pompy dozującej można wykorzystywać do dostarczania ilościowego.
 DFRobot Gravity - pompa przewodowa - perystaltyczna.
DFRobot Gravity - pompa przewodowa - perystaltyczna.
Przydatne linki |
| Klasyfikacja GPSR | Komponent |
| Szerokość opakowania | 17.5 cm |
| Wysokość opakowania | 5 cm |
| Głębokość opakowania | 13.5 cm |
| Masa opakowania | 0.19 kg |
Jako pierwszy zadaj pytanie dotyczące tego produktu!

Kraj pochodzenia: Chiny
Dane kontaktowe producenta: Zhiwei Robotics Corp. Unit 01, 26/F, A1 Shanghai T & I Tower, No. 1699 Zhongke Road, Pudong District, Shanghai, P.R.China [email protected]
Dane kontaktowe wprowadzającego na rynek UE: BOTLAND B. DERKACZ SP. K. Gola 25A - 63-640 Bralin [email protected]
Informacja o produkcie
Produkt jest komponentem przeznaczonym do dalszego montażu/prototypowania. Nie stanowi on samodzielnego wyrobu gotowego w rozumieniu przepisów o bezpieczeństwie produktów.



