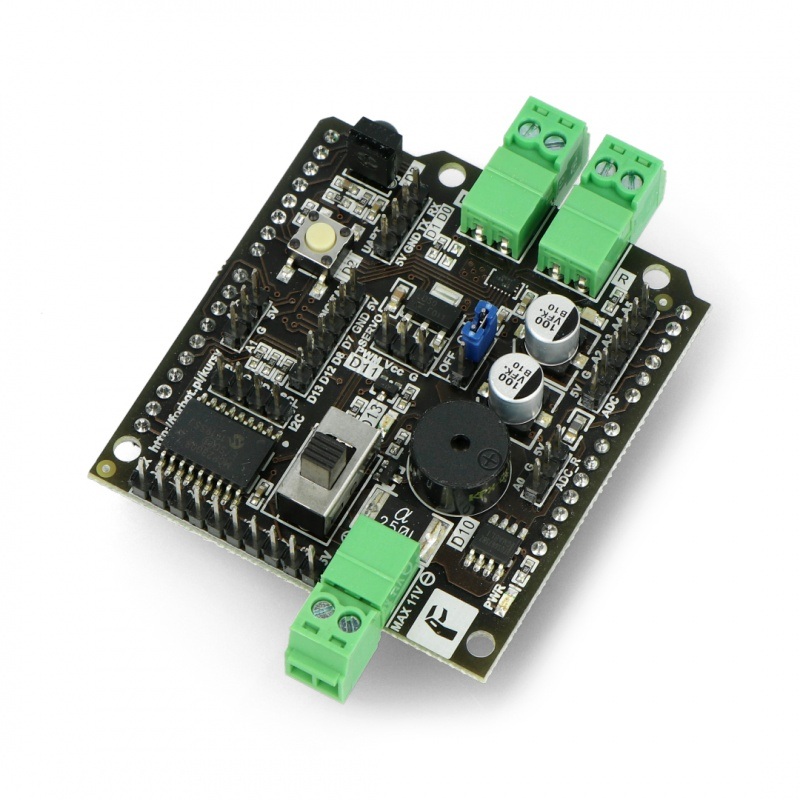









Forbot Robot Shield, to płytka rozszerzająca możliwości Arduino o to, co niezbędne do budowy robota. Na pokładzie modułu znaleźć można m.in. sterownik silników DC, złącze dla serwomechnizmu, ekspander I/O, odbiornik podczerwieni, buzzer oraz przycisk. Pozostałe sygnały Arduino zostały wyprowadzone na standardowe złącza typu goldpin.
FORBOT Robot Shield, to płytka rozszerzająca możliwości Arduino o to, co niezbędne do budowy robota. Na pokładzie modułu znaleźć można m.in. sterownik silników DC, złącze dla serwomechnizmu, ekspander I/O, odbiornik podczerwieni, buzzer oraz przycisk. Pozostałe sygnały Arduino zostały wyprowadzone na standardowe złącza typu goldpin.
|
Moduł dostępny jest również w zestawie zawierającym wszystkie niezbędne elementy do wykonania konstrukcji opisanych w kursie budowy robotów! |
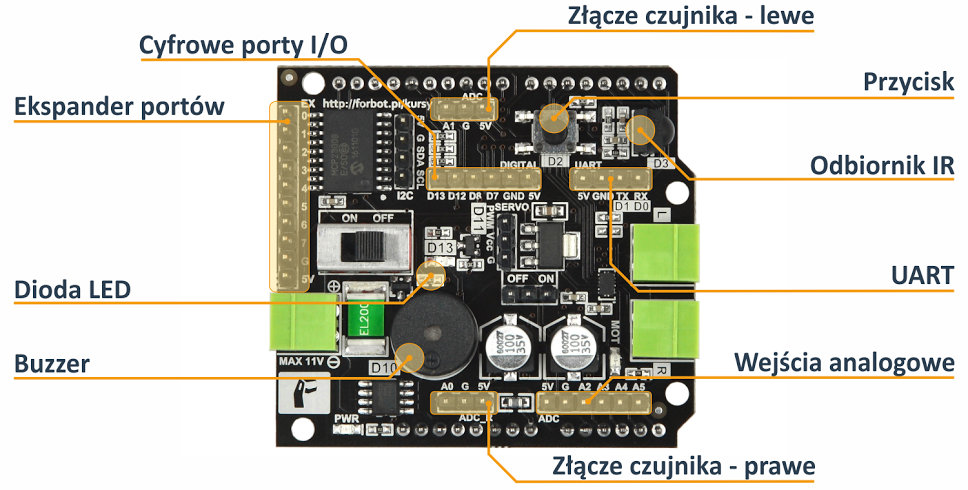
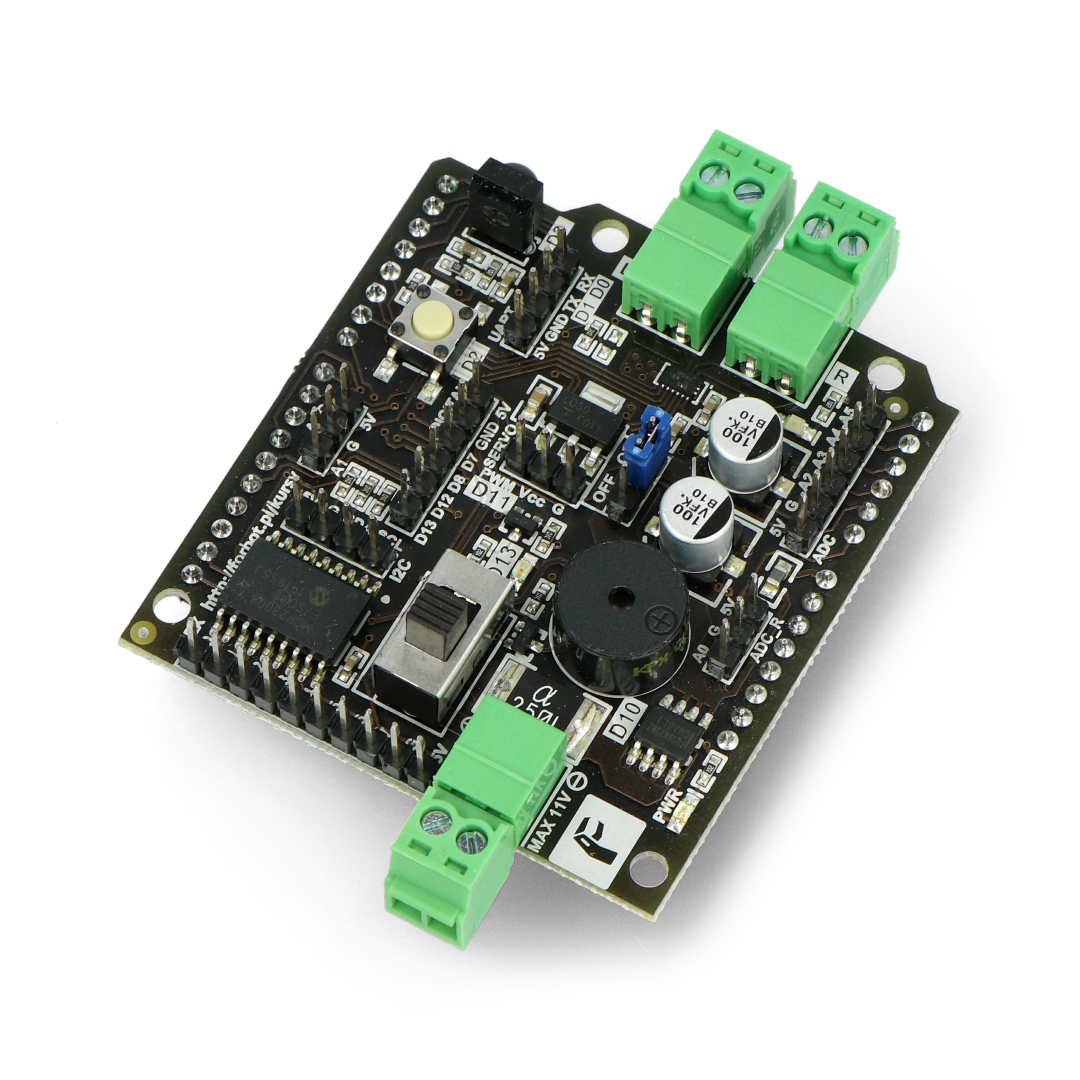
Rozkład elementów na płytce.
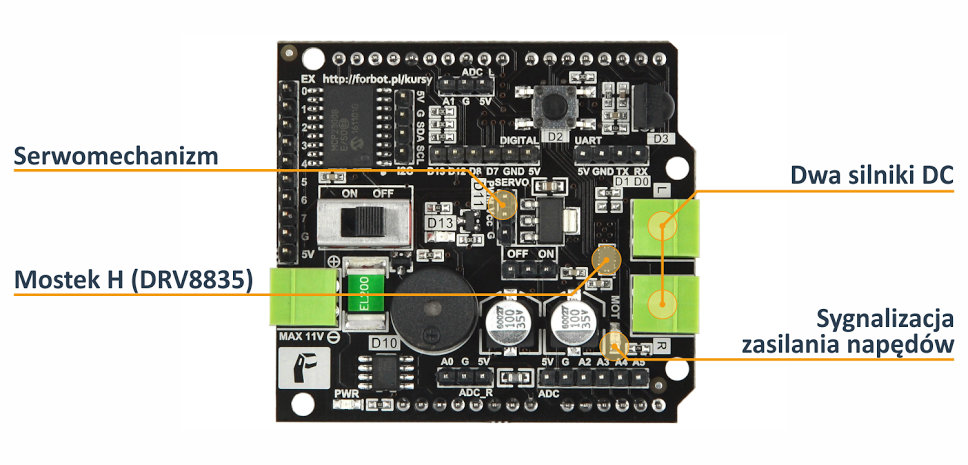
Elementy i złącza do kontroli silników prądu stałego.
Na płytce znajduje się sterownik silników DRV8835, który pozwala na podłączenie dwóch napędów DC (do 1,2A na kanał). Silniki zasilane są przez kondensatory filtrujące, które zabezpieczają elektronikę przed zakłóceniami generowanymi przez napędy. Moduł wyposażony jest również w osobne złącze dla serwomechanizmu.
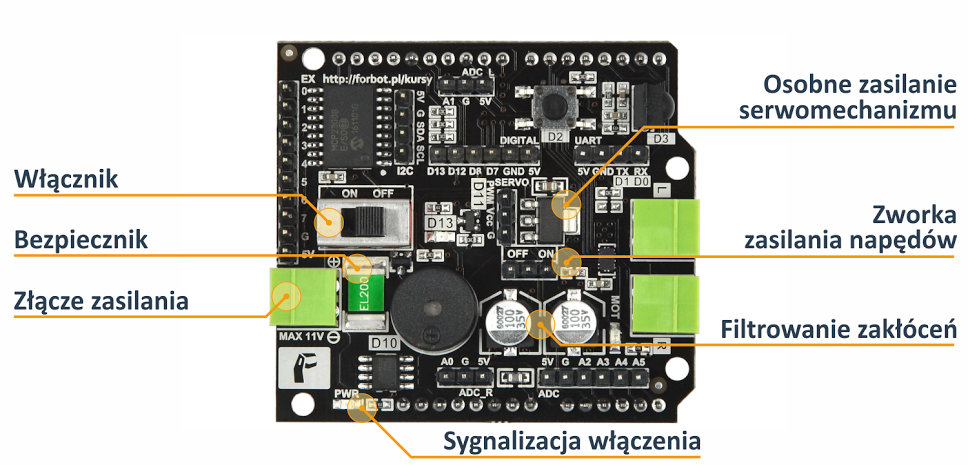
Shield należy zasilać napięciem z przedziału od 7 V do 11 V (zalecane od 8 do 10 V) za pomocą dedykowanego złącza (umieszczonego na lewej krawędzi). Płytka wyposażona jest w zabezpieczenie przed odwrotnym podłączeniem zasilania, bezpiecznik polimerowy oraz włącznik suwakowy. Napięcie podane na złącze zasilania wykorzystywane jest do zasilania dwóch silników DC oraz do serwomechanizmu (przez osobny stabilizator). Za pomocą wbudowanej zworki można odłączyć napięcie dopływające do napędów!
|
Płytka zasila również Arduino - nie ma konieczności podłączania osobnego zasilania dla elektroniki! |
Forbot Robot Shield dla Arduino.
Producentem płytki, która jest częścią zestawu do budowy robotów, jest polska firma MSX. Programy testowe wykorzystujące wszystkie peryferia oraz dokładny opis modułu znaleźć można w serii artykułów opublikowanej na Forbocie: http://kurs.forbot.pl/robot

Zestaw do budowy robota wraz z kursem on-line można nabyć osobno w naszym sklepie.
Przydatne linki |
| Klasyfikacja GPSR | Komponent |
| Szerokość opakowania | 9 cm |
| Wysokość opakowania | 2.5 cm |
| Głębokość opakowania | 14 cm |
| Masa opakowania | 0.027 kg |
Jako pierwszy zadaj pytanie dotyczące tego produktu!
| Model |
Mikro kontroler |
Piny |
Pamięć Flash RAM EEPROM |
Zasilanie |
Interfejs |
|---|---|---|---|---|---|
|
|
Renesas RA4M1 48 MHz |
14 I/O 6 PWM 6 analog |
256 kB 32 kB - |
DC: 6-24V USB: 5V |
UART I2C SPI CAN DAC |
|
|
Renesas / ESP RA4M1 / 32-S3-Mini 48 MHz / 240 Mhz |
14 I/O 6 PWM 6 analog |
256 kB 32 kB - |
DC: 6-24V USB: 5V |
UART I2C SPI CAN DAC |
|
|
ATmega 328 16 MHz |
14 I/O 6 PWM 6 analog |
32 kB 2 kB 1 kB |
DC: 7-12V USB: 5V |
UART I2C SPI |
|
|
ATmega 4809 20 MHz |
14 I/O 5 PWM 6 analog |
48 kB 6 kB 256 B |
DC: 5-12V USB: 5V |
UART I2C SPI |
|
|
ATmega 32u4 16 MHz |
20 I/O 7 PWM 12 analog |
32 kB 2,5 kB 1 kB |
DC: 7-12V USB: 5V |
UART I2C SPI USB |
| Mega 2560
|
ATmega 2560 16 MHz |
54 I/O 16 analog |
256 kB 8 kB 4 kB |
DC: 7-12V |
UART I2C SPI |
|
|
AT91SAM 3X8E 84 MHz |
54 I/O 12 analog |
512 kB 96 kB - |
DC: 7-12V USB: 5V |
UART I2C SPI USB CAN |
|
|
STM 32H747XI 480 MHz + 240 MHz |
75 I/O 12 PWM 12 analog |
2 MB 1 MB - |
DC: 6-24V USB: 5V |
UART I2C SPI CAN |
|
|
ARM ATSAMD21G18 48 MHz |
20 I/O 10 PWM 6 analog |
256 kB 32 kB - |
DC: 7-12V USB: 5V |
UART I2C SPI |
|
|
ATmega 32u4 16 MHz |
20 I/O 12 analog |
32 kB 2,5 kB 1 kB |
DC: 7-12V USB: 5V |
UART I2C SPI |
|
|
ATmega 328 16 MHz |
22 I/O 8 analog |
32 kB 2 kB 1 kB |
DC: 7-12V USB: 5V |
UART I2C SPI |
|
|
ATmega 328 16 MHz |
14 I/O
6 PWM 6 analog |
32 kB 2 kB 1 kB |
DC: 7-12V USB: 5V |
UART I2C SPI |

Informacja o produkcie
Produkt jest komponentem przeznaczonym do dalszego montażu/prototypowania. Nie stanowi on samodzielnego wyrobu gotowego w rozumieniu przepisów o bezpieczeństwie produktów.
Dane GPSR
Kraj pochodzenia: Polska
Dane kontaktowe producenta: MSX Elektronika Sp. z o.o. Słowackiego 37 05-820 Piastów, Poland [email protected]
Dane kontaktowe wprowadzającego na rynek UE: MSX Elektronika Sp. z o.o. Słowackiego 37 05-820 Piastów, Poland [email protected]

")