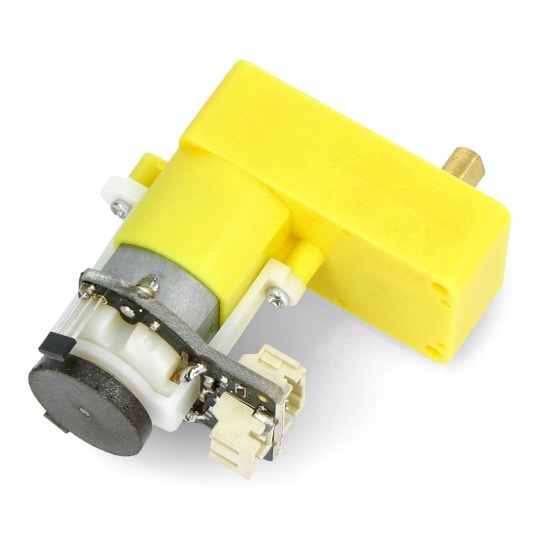







Silnik z przekładnią 120:1, 160 obr/min, moment obrotowy 0,8 kg*cm (0,07 Nm). Urządzenia posiada enkoder kwadraturowy o rozdzielczości 16 impulsów na obrót (po przełożeniu 1920 impulsów na obrót). Silnik może być sterowany przez mikrokontroler Arduino.
Mikro silnik z przekładnią 120:1, 160 obr/min, moment obrotowy 0,8 kg*cm (0,07 Nm). Urządzenia posiada enkoder kwadraturowy o rozdzielczości 16 impulsów na obrót (po przełożeniu 1920 impulsów na obrót). Silnik idealnie nadaje się do zastosowania w robotach mobilnych.
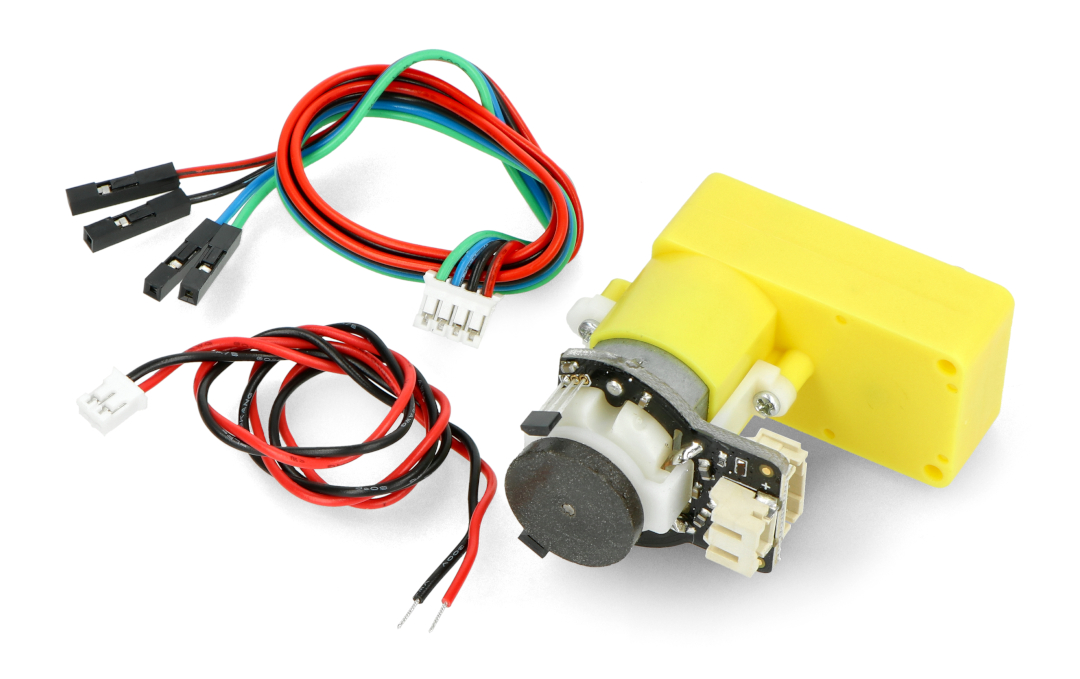
Do modułu dołączony jest przewód połączeniowy z końcówkami żeńskimi.
|
Produkt kompatybilny z Arduino Producent przygotował przewodnik użytkownika wraz z przykładowym programem dla Arduino. |
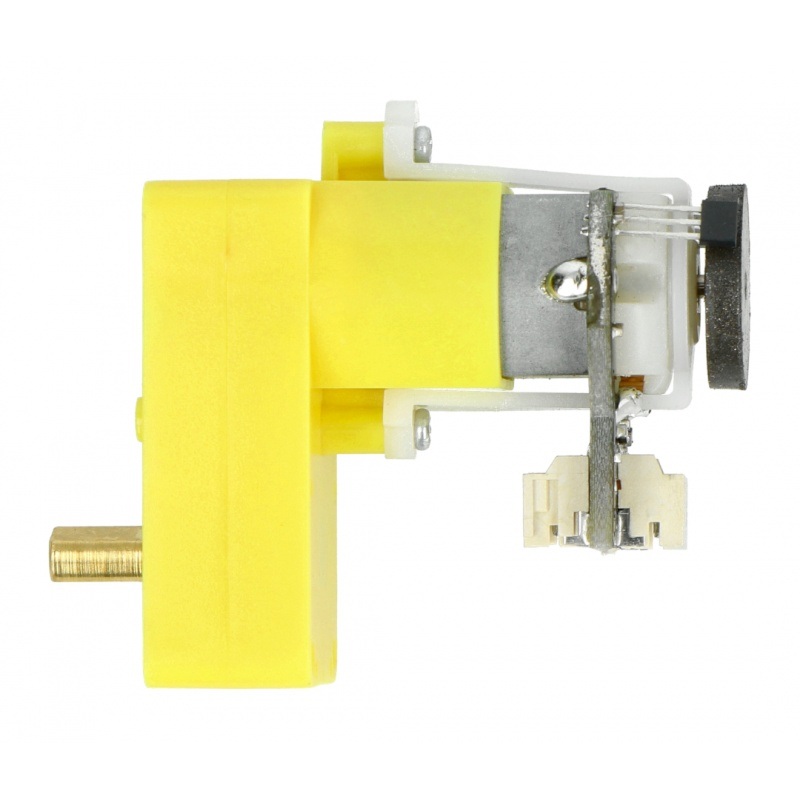
Moduł silnika posiada 6 wyprowadzeń, w zestawie znajduje się przewód z gniazdami raster 2,54 mm.

Rozkład wyprowadzeń silnika.
| Nr | Nazwa | Opis |
|---|---|---|
| 1 | Zasilanie silnika biegun dodatni + | Napięcie z zakresu od 3 V do 7,5 V. |
| 2 | Zasilanie silnika biegun ujemny - | Masa silnika. |
| 3 | Wyjście sygnału enkodera A | Sygnał A prostokątny, częstotliwościowy - do pomiaru prędkości obrotowej. |
| 4 | Wyjście sygnału enkodera B | Sygnał B prostokątny, częstotliwościowy - do pomiaru prędkości obrotowej. |
| 5 | Masa enkodera | Masa enkodera. |
| 6 | Zasilanie enkodera | Napięcie z zakresu od 4,5 V do 7,5 V. |
Zasada działania enkoderów
Parametry dla pracy bez obciążenia przy zasilaniu 6 V
Prędkość: 160 obr/min
Prąd: 0,17 A
Prędkość: 60 obr/min
Prąd: 0,14 A
Przydatne linki |
| Napięcie zasil. od | 3.0 V |
| Napięcie zasil. do | 7.5 V |
| Silnik - pobór prądu | 170 mA |
| Silnik - przekładnia | 120:1 |
| Prędkość obrotowa | 160 obr/min |
| Moment obrotowy | 0.8 kg*cm |
| Masa | 50 g |
| Silnik - śr. wał | 5.4 mm |
| Klasyfikacja GPSR | Komponent |
| Szerokość opakowania | 7 cm |
| Wysokość opakowania | 3.6 cm |
| Głębokość opakowania | 10 cm |
| Masa opakowania | 0.048 kg |
Jako pierwszy zadaj pytanie dotyczące tego produktu!

Informacja o produkcie
Produkt jest komponentem przeznaczonym do dalszego montażu/prototypowania. Nie stanowi on samodzielnego wyrobu gotowego w rozumieniu przepisów o bezpieczeństwie produktów.
Dane GPSR
Kraj pochodzenia: Chiny
Dane kontaktowe producenta: Zhiwei Robotics Corp. Unit 01, 26/F, A1 Shanghai T & I Tower, No. 1699 Zhongke Road, Pudong District, Shanghai, P.R.China [email protected]
Dane kontaktowe wprowadzającego na rynek UE: BOTLAND B. DERKACZ SP. K. Gola 25A - 63-640 Bralin [email protected]