

















































































































































































































































































































































































































- Produkt wycofany






Moduł SparkX Qwiic IMU MPU-9250 to 9-osiowa jednostka nawigacji inercyjnej (IMU). Posiada on funkcje żyroskopu, akcelerometru i magnetometru. Wykorzystać go można do budowy samobalansującego robota lub nawet autopilota do samolotu/drona. Jest w pełni kompatybilny z Arduino.
|
Uwaga! Sprzedaż produktu została zakończona. Sprawdź inne w tej kategorii. |
Moduł SparkX Qwiic IMU MPU-9250 to 9-osiowa jednostka nawigacji inercyjnej (IMU). Posiada on funkcje żyroskopu, akcelerometru i magnetometru. Wykorzystać go można do budowy samobalansującego robota lub nawet autopilota do samolotu/drona. Układ MPU-9250 pełni rolę 3-osiowego żyroskopu i 3-osiowego akcelerometru a układ AK8963 3-osiowego magnetometru. Względem poprzedniej wersji modułu (EOL MPU-9150) ma on o 44% mniejszy pobór energii, a względem większości konkurencyjnych modułów aż 3 razy dokładniejszy żyroskop i 4 razy większą skalę magnetometru. Udało się to osiągnąć głównie dzięki 16-bitowemu analogowo-cyfrowemu przetwornikowi.
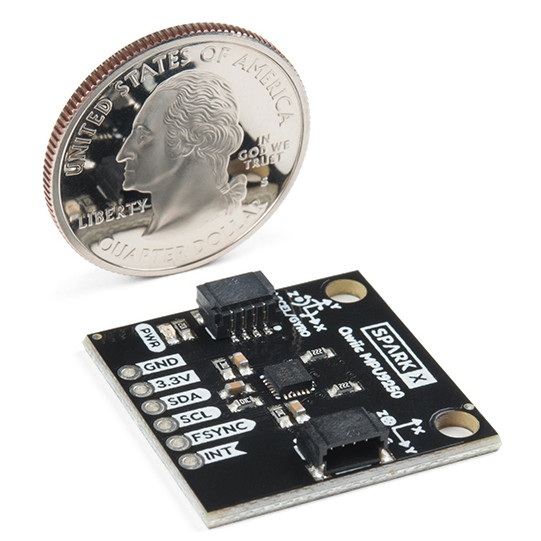
SparkX Qwiic IMU MPU-9250 do komunikacji wykorzystuje interfejs I2C z domyślnymi adresami 0x69 lub 0x68. Dodatkowo dostępny jest też pin FSYNC pozwalający na synchronizację klatek oraz INT dający możliwość programowego sterowania przerwaniami. Producent udostępnia dwie biblioteki Arduino i przykładowe kody źródłowe.
Przydatne linki |
| Szerokość opakowania | 0.001 cm |
| Wysokość opakowania | 0.001 cm |
| Głębokość opakowania | 0.001 cm |
| Masa opakowania | 0.001 kg |
Jako pierwszy zadaj pytanie dotyczące tego produktu!
Dane GPSR
Kraj pochodzenia: Polska
Dane kontaktowe producenta: BOTLAND B. DERKACZ SP. K. Gola 25A - 63-640 Bralin [email protected]
Dane kontaktowe wprowadzającego na rynek UE: BOTLAND B. DERKACZ SP. K. Gola 25A - 63-640 Bralin [email protected]


