






























































































































































































































































































































































































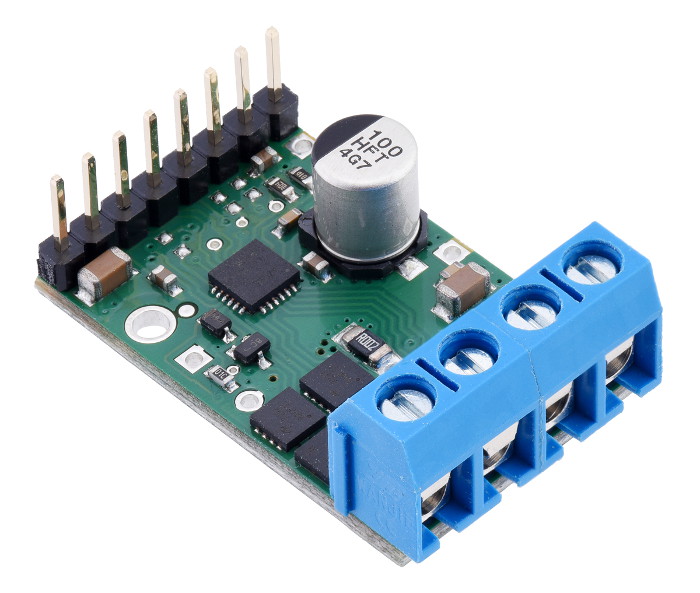
Jednokanałowy wydajny sterownik silnika prądu stałego DC. Ciągły prąd na kanał wynosi 13 A (chwilowy nawet do 100 A), napięcie zasilanie silników od 6,5 V do 40 V, napięcie części logicznej od 1,8 V do 5,5 V. Urządzenie posiada także czujnik przepływu prądu oraz możliwość ograniczenia prądu silnika.
Moduł pozwala kontrolować jeden silnik prądu stałego. Silnik może być zasilany napięciem od 6,5 V do 40 V przy ciągłym poborze prądu do 13 A, chwilowym (przez 10 ms) do 100 A. Prędkość można kontrolować poprzez sygnał PWM, kierunek za pomocą wyprowadzenia cyfrowego DIR - podając stan niski (logiczne 0) lub wysoki (logiczna 1). Urządzenie posiada także czujnik przepływu prądu oraz możliwość ograniczenia prądu silnika.

W zestawie znajduje się sterownik oraz złącza do samodzielnego lutowania.
G2 High Power 24v13 - jednokanałowy sterownik silników 40V/13A - Pololu 2992.
Podłączenie silnika oraz jego zasilania znajdują się po jednej stronie modułu. Piny do kontroli (część logiczna od 1,8 V do 5 V) są umiejscowione z drugiej strony modułu. Zasilanie silnika jest zdolne dostarczyć wysoki prąd. Do złącz silnika można przylutować złącza goldpin lub złącza śrubowe (oba w zestawie).
W celu zapewnienia wysokiej wydajności bardzo ważne jest podłączenie dużego kondensatora między zasilaniem silnika a masą jak najbliżej modułu. Zaleca się użycie kondensatora o pojemności co najmniej kilkuset μF. Wymagana pojemność zależy od wielu czynników, np. od jakości i odległości źródła zasilania (powyżej 30 cm), od parametrów silnika oraz częstotliwości sygnału PWM. Kondensator może być podłączony do otworów oznaczonych "+" i "-" (odpowiednio VM i GND). Sterownik posiada wbudowany kondensator 100 μF wystarczający do podstawowych zastosowań. Jednak dla większości układów zalecane jest użycie większego.
Część logiczna modułu pracuje z napięciem od 1,8 V do 5 V (maksymalnie 5,5 V). Domyślnie sterownik znajduje się w stanie uśpienia. Aby go uruchomić należy podpiąć pin SLP do stanu wysokiego. W zastosowaniach typowych potrzebne są tylko dwa dodatkowe piny PWM oraz DIR.
| PIN | Opis |
|---|---|
|
VIN |
Napięcie zasilania silnika z zakresu od 6,5 V do 40 V z zabezpieczeniem przed odwrotnym podłączeniem. |
| VM | Pin daje dostęp do zasilania silnika po zabezpieczeniu przed odwrotnym podłączeniem. Może być wykorzystany do dostarczania energii z odwrotnego podłączenia do innych elementów. Nie powinno być używane z wysokim prądem. Pin wykorzystywany jako wyjście. |
| + i - | Piny do podłączenia kondensatora podpięte odpowiednio do VM i GND. |
| 3v3 | Regulowane wyjście 3,3 V zapewniające kilka miliamperów do zasilania małych elementów. Nie może być podłączony do innych zewnętrznych linii zasilania. Wyłączony, gdy sterownik jest w trybie uśpienia. Należy uważać przed zwarciem z pinem V+, gdyż grozi to zniszczeniem płytki. |
| GND | Masa układu. |
| OUTA | Pin wyjściowy do silnika (połączony z jednym z zacisków silnika). |
| OUTB | Pin wyjściowy do silnika (połączony z drugim z zacisków silnika). |
| PWM | Sygnał wejściowy PWM do sterowania silnikiem. Domyślnie w stanie niskim. |
| DIR |
Pin kierunku obrotów silnika. Przy stanie niskim prąd płynie z OUTA do OUTB, przy stanie wysokim OUTB do OUTA. Domyślnie w stanie niskim. |
| SLP | Pin ustawiający sterownik w stan uśpienia. Domyślnie w stanie niskim (w stanie uśpienia). |
| FLT | Wskaźnik błędów. Ustawiany w stan niski po wykryciu błędu. W celu wykorzystania należy go podpiąć do stanu wysokiego (napięcia logiki układu) |
| CS | Wyjście czułości prądu. Generuje napięcie proporcjonalne do prądu silnika: 400 mV / A + 50 mV offset. |
| VREF | Wejście napięcia referencyjnego. Należy dołączyć rezystor do masy w celu ograniczenia maksymalnego prądu wyjściowego. Bez dodatkowego rezystora wartość maksymalna wynosi 30 A. |
W tabeli zostały przedstawione zależności wyjść od sygnałów wejściowych:
H - stan wysoki
L - stan niski
X - bez znaczenia
|
PWM |
DIR |
OUTA | OUTB | Stan silnika |
|---|---|---|---|---|
|
H |
H | H | L |
Silnik kręci się zgodnie ze wskazówkami zegara z prędkością % PWM. |
|
H |
L | L | H |
Silnik kręci się odwrotnie do wskazówek zegara z prędkością % PWM. |
|
L |
X | L | L | Hamowanie. |

G2 High Power 24v13 - jednokanałowy sterownik silników 40V/13A - Pololu 2992.
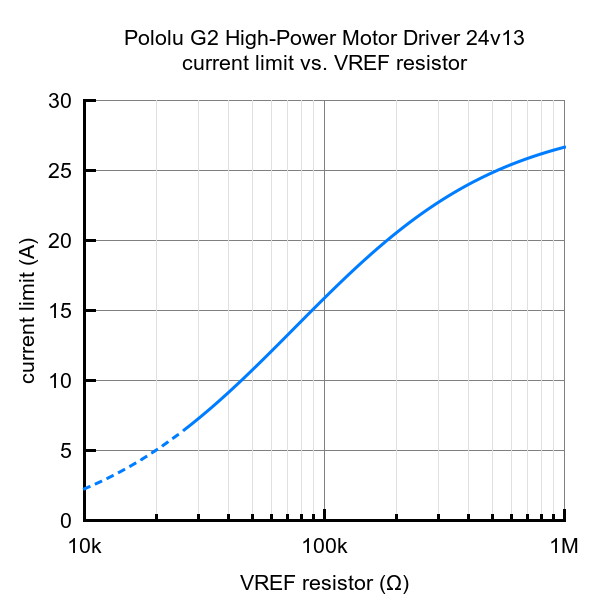
Zależność między wartością rezystora na VREF i wartością graniczną prądu.
Wyjście CS jest aktywne tylko wtedy, gdy mostek H jest w trybie sterownika. Jest nieaktywny (stan niski), gdy sterownik jest w trybie hamowania, co dzieje się gdy PWM jest niski lub jest aktywny limit prądu. Prąd nadal będzie krążyć przez silnik gdy sterownik rozpocznie hamowanie, lecz prąd na pinie CS nie będzie odzwierciedlać prądu silnika w trybie hamowania. Napięcie CS jest używane wewnętrznie przez sterownik, aby uniknąć zakłóceniom nie należy obciążenia pojemnościowego (kondensatora) do tego pin ani podłączać go do obciążenia powyżej kilku mA.
Moduł sterownika posiada zdolność ograniczenia prądu silnika przez cięcie. Gdy prąd osiągnie wartość progową, sterownik ustawi się w tryb hamowania na krótki okres przed ponownym zasileniem silnika. Bardziej praktyczne jest wykorzystywanie sterownika z silnikiem, który potrzebuje kilku amperów podczas pracy, ale dużo więcej przy rozruchu.
Domyślnie graniczna wartość prądu jest równa 30 A. Można ją obniżyć przez zamontowanie rezystora między piny VREF i GND. Poniższy wykres przedstawia zależność między wartością rezystora na VREF i wartością graniczną prądu. Na przykład, dla 100 kΩ między VREF a GND, prąd zostaje obniżony do około 16 A. Ograniczenie prądu jest mniej dokładne w szczególnie niskich ustawieniach (przerywana linia).
Sterownik może wykryć różne błędy sygnalizowane przez ustawienie pinu FLT w stan niski. W celu wykorzystania należy go podpiąć do stanu wysokiego (napięcia logiki układu). Wykryte może zostać zwarcie na wyjściach, zbyt niskie napięcie oraz przegrzanie. Wszystkie błędy wyłączają wyjścia silnika, lecz nie blokują ich, to oznacza, że sterownik będzie próbował wznowić działanie po ustąpieniu błędu.
Sterownik potrafi obsłużyć duże skoki prądu przez krótki czas (100 A przez kilka milisekund). Przy ciągłej pracy wytrzymuje 13 A, lecz jest to uzależnione od warunków zewnętrznych, takich jak temperatura otoczenia i chłodzenia silnika. Do płytki można dołożyć radiator w celu polepszenia wydajności.
Sterownik nie posiada automatycznego wyłączenia w przypadku przegrzania. Należy zachować ostrożność w celu uniknięcia uszkodzenia układu.
| Nazwa |
Napięcie zasilania |
Prąd ciągły |
|---|---|---|
| G2 High-Power 18v25 | 30 V | 25 A |
| G2 High-Power 18v17 | 30 V | 17 A |
| G2 High-Power 24v21 | 40 V | 21 A |
| G2 High-Power 24v13 | 40 V | 13 A |
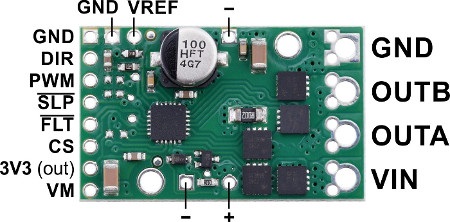
Opis pinów sterownika.
Przydatne linki |
| Napięcie zasil. od | 6.5 V |
| Napięcie zasil. do | 40.0 V |
| Wydajność prąd | 1.0 A |
| Ilość kanałów | 1 |
| Szerokość opakowania | 8 cm |
| Wysokość opakowania | 1 cm |
| Głębokość opakowania | 10.5 cm |
| Masa opakowania | 0.009 kg |
Jako pierwszy zadaj pytanie dotyczące tego produktu!
Kraj pochodzenia: Stany Zjednoczone
Dane kontaktowe producenta: Pololu Corporation 920 Pilot Rd. Las Vegas, NV 89119 USA [email protected]
Dane kontaktowe wprowadzającego na rynek UE: BOTLAND B. DERKACZ SP. K. Gola 25A - 63-640 Bralin




