



Moduł GPS z funkcją Dead Reckoning oparty na układzie NEO-M8U firmy u-blox zapewnia dokładną nawigację nawet bez dostępu do sygnału satelitarnego. Obsługuje wiele systemów GNSS, działa w technologii Qwiic i jest idealny do zastosowań mobilnych, w tym pojazdów autonomicznych i robotów.
Do prawidłowego działania modułu wymagana jest zewnętrzna antena ze złączem U.FL, która nie jest częścią zestawu i należy zakupić ją oddzielnie.
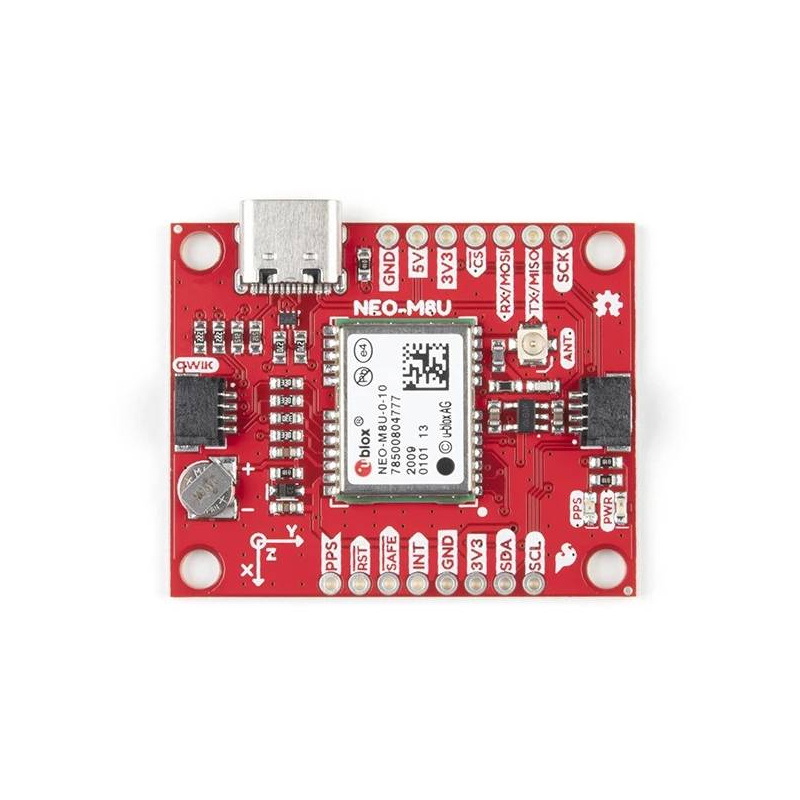
Moduł GPS z 72-kanałowym odbiornikiem GNSS NEO-M8U firmy u-blox wykorzystuje technologię Untethered Dead Reckoning (UDR), umożliwiając ciągłe określanie pozycji nawet przy całkowitej utracie sygnału GNSS - np. w krótkich tunelach czy garażach podziemnych. Odbiornik zapewnia dokładność pozycjonowania na poziomie około 2,5 m, obsługuje jednoczesny odbiór danych z trzech konstelacji GNSS (GPS, GLONASS, Galileo, BeiDou) oraz oferuje częstotliwość aktualizacji do 30 Hz. Zintegrowany akcelerometr i żyroskop umożliwiają precyzyjne śledzenie ruchu w czasie rzeczywistym. Płytka została wyposażona w interfejsy I2C (Qwiic), UART oraz SPI (po aktywacji zworki), a konfiguracja możliwa jest przez złącze USB typu C z wykorzystaniem programu u-center. Dodatkowo, SparkFun udostępnia bibliotekę Arduino, ułatwiającą integrację modułu z mikrokontrolerami. Do działania wymagana jest zewnętrzna antena GNSS z gniazdem U.FL, która nie jest dołączona do zestawu i należy ją dokupić oddzielnie.
Producent przygotował szczegółowy przewodnik użytkownika, który ułatwi rozpoczęcie pracy z modułem. Sprawdź!
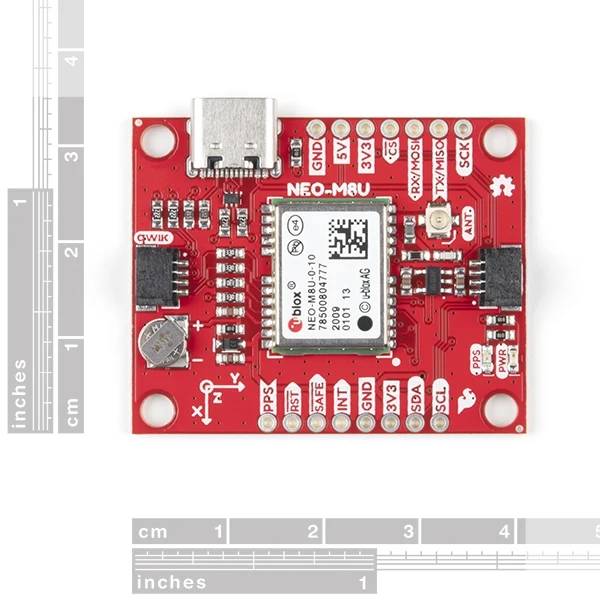
Moduł GPS NEO-M8U - Dead Reckoning - Qwiic - SparkFun GPS‑16329.
NEO-M8U wykorzystuje technologię Untethered Dead Reckoning (UDR), która zapewnia bardzo dokładną i ciągłą pozycję.
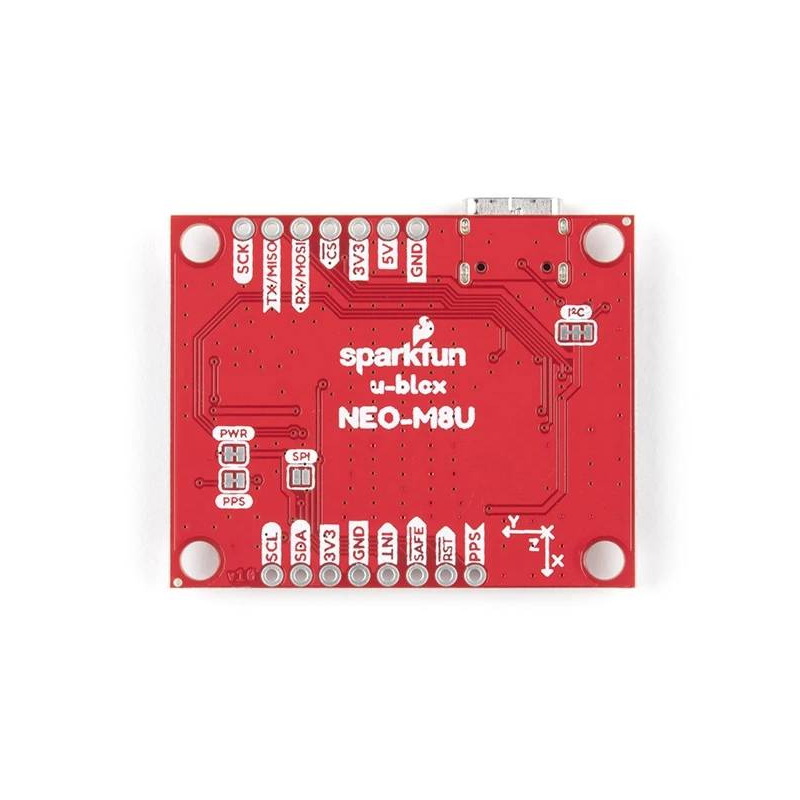
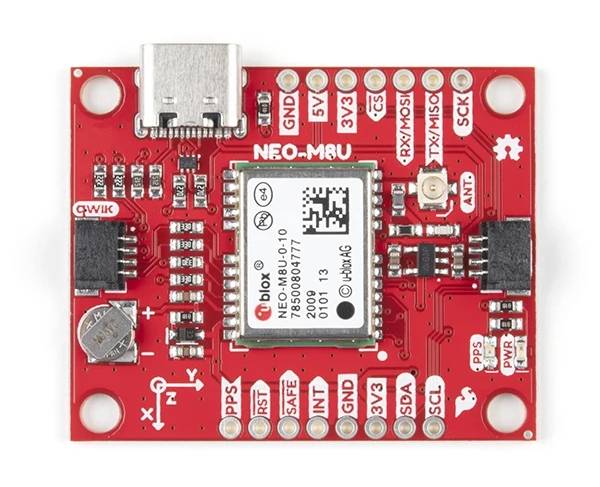
Moduł zasilany jest napięciem 3,3 V i udostępnia szeroki zestaw wyprowadzeń: złącze U.FL do podłączenia anteny, dwa złącza Qwiic, interfejsy I2C, SPI i UART, a także piny funkcjonalne: PPS, RESET, SAFEBOOT oraz INT. Na płytce znajdują się także diody LED sygnalizujące zasilanie i puls czasu (PPS), jak również zworki konfiguracyjne umożliwiające modyfikację funkcji interfejsów. Wbudowany czujnik IMU (akcelerometr i żyroskop) zapewnia dodatkowe dane ruchu i orientacji przestrzennej.
Moduł można programować za pomocą środowiska Arduino IDE oraz oficjalnej biblioteki SparkFun u-blox GNSS. Zyskujesz również możliwość konfiguracji parametrów działania poprzez protokół UBX lub przy użyciu narzędzia u-center dostarczanego przez firmę u-blox. Konfigurowalne funkcje obejmują m.in. częstotliwość odświeżania, geofencing, tryb energooszczędny, wykrywanie spoofingu i inne.
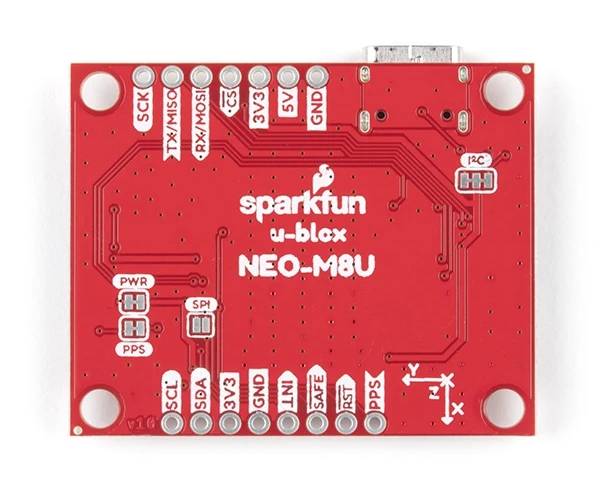
Płytka posiada wbudowany akumulator, który zasila zegar czasu rzeczywistego (RTC).
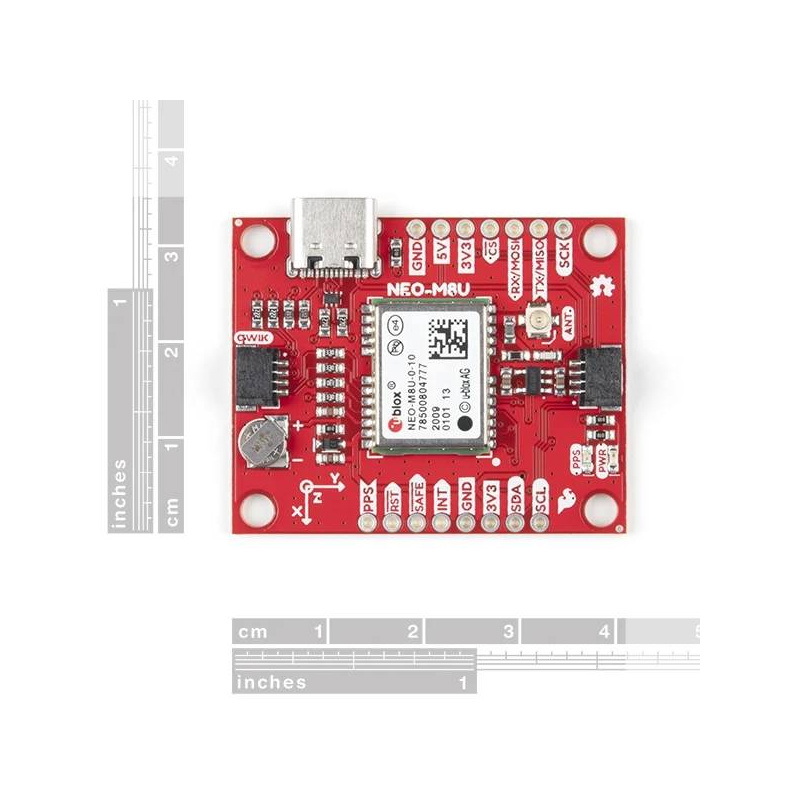
Kompaktowe wymiary sprawdzą się w wielu projektach.
| Klasyfikacja GPSR | Komponent |
| Szerokość opakowania | 5 cm |
| Wysokość opakowania | 9.4 cm |
| Głębokość opakowania | 0.5 cm |
| Masa opakowania | 0.007 kg |
Jako pierwszy zadaj pytanie dotyczące tego produktu!
Informacja o produkcie
Produkt jest komponentem przeznaczonym do dalszego montażu/prototypowania. Nie stanowi on samodzielnego wyrobu gotowego w rozumieniu przepisów o bezpieczeństwie produktów.
Dane GPSR
Kraj pochodzenia: Stany Zjednoczone
Dane kontaktowe producenta: SparkFun Electronics 6333 Dry Creek Pkwy, Niwot, CO 80503, Stany Zjednoczone
Dane kontaktowe wprowadzającego na rynek UE: BOTLAND B. DERKACZ SP. K. Gola 25A - 63-640 Bralin