
























































































































































































































































































































































































- Produkt wycofany






Serwomechanizm Kitronik bazujący na modelu Feetech FS90MG-CL z metalową przekładnią. Zasilane napięciem od 4,8 V do 6 V, moment obrotowy wynosi od 1,8 kg*cm do 2,2 kg*cm, zakres ruchu do 180°. Przewody zostały zakończone złączami krokodylkowymi.
Serwomechanizm Kitronik bazujący na modelu Feetech FS90MG-CL z metalową przekładnią. Zasilane napięciem od 4,8 V do 6 V, moment obrotowy wynosi od 1,8 kg*cm do 2,2 kg*cm, zakres ruchu do 180°. Przewody zostały zakończone złączami krokodylkowymi. Jeżeli serwo będzie wykorzystywane w projektach z płytką micro:bit, do jego zasilania należy wykorzystać osobne źródło zasilania lub sterownik Kitronik Klip Motor Driver, w którym zasilanie może być doprowadzone bezpośrednio z niego.
Serwomechanizm może być programowany z wykorzystaniem MakeCode lub Python, które są idealnym rozwiązaniem dla nowicjuszy oraz profesjonalistów micro:bit. Do zestawu dołączono także komplet czterech orczyków.
Serwomechanizm posiada przewód 3-pin ze złączami krokodylkowymi. Zasilany jest napięciem od 4,8 V do 6 V.

Kolorowe złącza krokodylkowe.
| Kolor przewodu | Kolor złącza | Opis |
|---|---|---|
| Brązowy | Czarny | Masa - GND |
| Czerwony | Czerwony | Zasilanie |
| Pomarańczowy | Żółty | Sygnał |
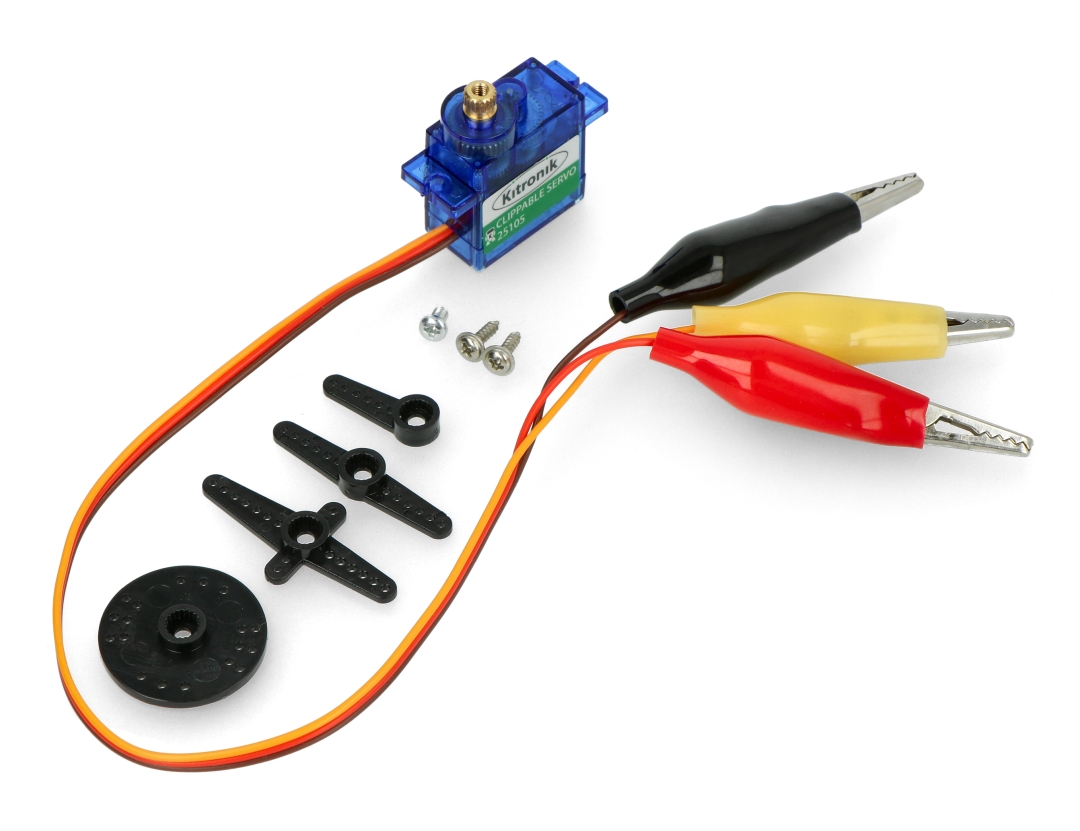 Zawartość zestawu.
Zawartość zestawu.
Przydatne linki |
| Długość | 32 mm |
| Szerokość | 12 mm |
| Wysokość | 31 mm |
| Napięcie zasil. od | 4.8 V |
| Napięcie zasil. do | 6.0 V |
| Moment obrotowy | 2.2 kg*cm |
| Masa | 12.0 g |
| Serwo - Zakres | 180 ° |
| Serwo - Rozmiar | micro |
| Serwo - prędkość | 0,09 s/60° |
| Serwo - Rodzaj | cyfrowe |
| Szerokość opakowania | 7 cm |
| Wysokość opakowania | 1.5 cm |
| Głębokość opakowania | 7 cm |
| Masa opakowania | 0.022 kg |
Jako pierwszy zadaj pytanie dotyczące tego produktu!

Kraj pochodzenia: Wielka Brytania
Dane kontaktowe producenta: Kitronik Ltd, Unit 12a, Glaisdale Point, Glaisdale Parkway, Nottingham, UK. NG8 4GP. [email protected]
Dane kontaktowe wprowadzającego na rynek UE: BOTLAND B. DERKACZ SP. K. Gola 25A - 63-640 Bralin







