

















































































































































































































































































































































































































- Produkt wycofany




Dwukanałowy sterownik silników prądu stałego. Komunikuje się poprzez port microUSB, protokół UART TTL, sygnał analogowy lub interfejs radiowy RC. Napięcie zasilania wynosi od 6 V do 34 V. Prąd ciągły to 15 A, a maksymalny, chwilowy: 30 A.
|
Uwaga! Sprzedaż produktu została zakończona. Dostępna jest nowa wersja. |
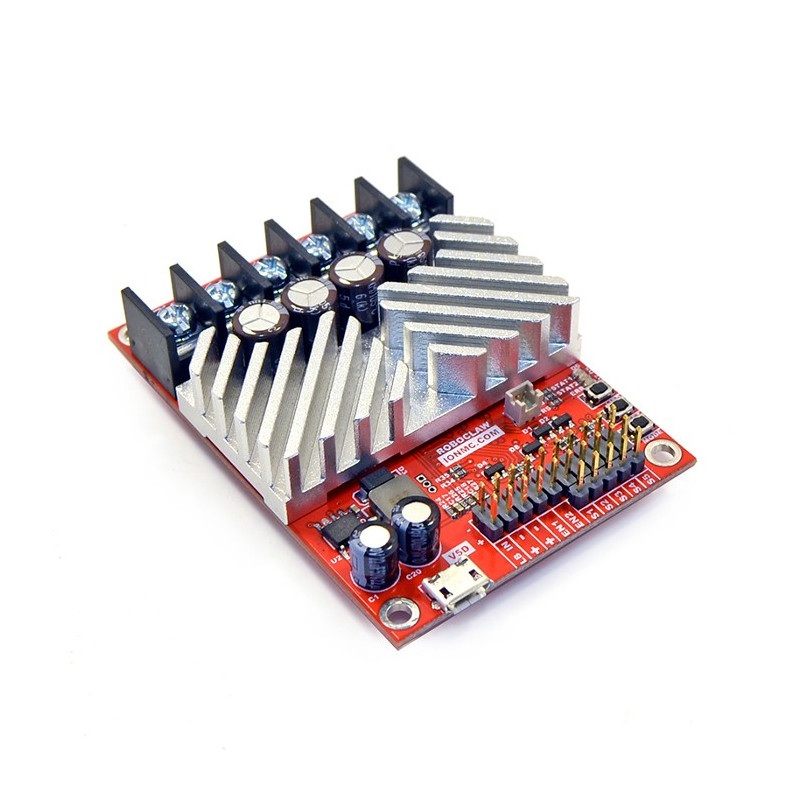
Sterownik pozwala kontrolować dwa silniki prądu stałego zasilanych napięciem od 6 V do 34 V o ciągłym poborze prądu do 15 A (chwilowym do 30 A). Układ RoboClaw komunikuje się poprzez: port USB komputera, sygnał cyfrowy UART, TTL, interfejs radiowy RC lub sygnał analogowy.

Ta wersja posiada złącza typu goldpin do podłączenia sygnałów sterujących.
|
Producent udostępnia: |
| 2x7A | 2x15A | 2x30A | 2x45A | 2x60A | |
|---|---|---|---|---|---|
| Liczba kanałów: | 2 | ||||
| Napięcie: | od 6 V do 34 V | ||||
| Prąd ciągły: | 7,5 A | 15 A | 30 A | 45 A | 60 A |
| Prąd chwilowy: | 15 A | 30 A | 60 A | 60 A | 120 A |
| Prąd BEC 5 V: | 150 mA | 3 A | 3 A | 3 A | 3 A |
| Szerokość: | 42 mm | 52 mm | 52 mm | 52 mm | 86 mm |
| Długość: | 48 mm | 74 mm | 74 mm | 74 mm | 100 mm |
| Masa: | 18 g | 60 g | 60 g | 63 g | 295 g |
Przydatne linki |
| Napięcie zasil. od | 6.0 V |
| Napięcie zasil. do | 33.0 V |
| Wydajność prąd | 15 A |
| Ilość kanałów | 2 |
| Szerokość opakowania | 0.001 cm |
| Wysokość opakowania | 0.001 cm |
| Głębokość opakowania | 0.001 cm |
| Masa opakowania | 0.001 kg |
Jako pierwszy zadaj pytanie dotyczące tego produktu!
Dane GPSR
Kraj pochodzenia: Polska
Dane kontaktowe producenta: BOTLAND B. DERKACZ SP. K. Gola 25A - 63-640 Bralin [email protected]
Dane kontaktowe wprowadzającego na rynek UE: BOTLAND B. DERKACZ SP. K. Gola 25A - 63-640 Bralin [email protected]

