- Produkt wycofany







Czujnik do pomiaru przyspieszeń, pola magnetycznego, prędkości kątowej oraz wysokości. Jest połączeniem 3-osiowego akcelerometru, magnetometru, żyroskopu i barometru. Komunikuje się poprzez magistralę I2C.
|
Uwaga! Produkt zastąpiony przez nową wersję: AltIMU-10 v4 żyroskop, akcelerometr, kompas i wysokościomierz. |
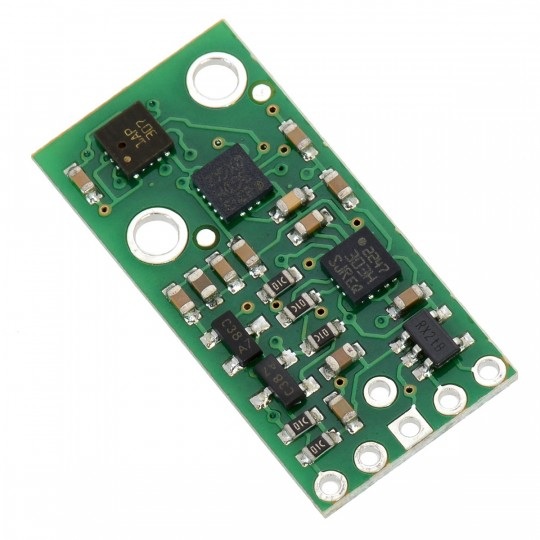
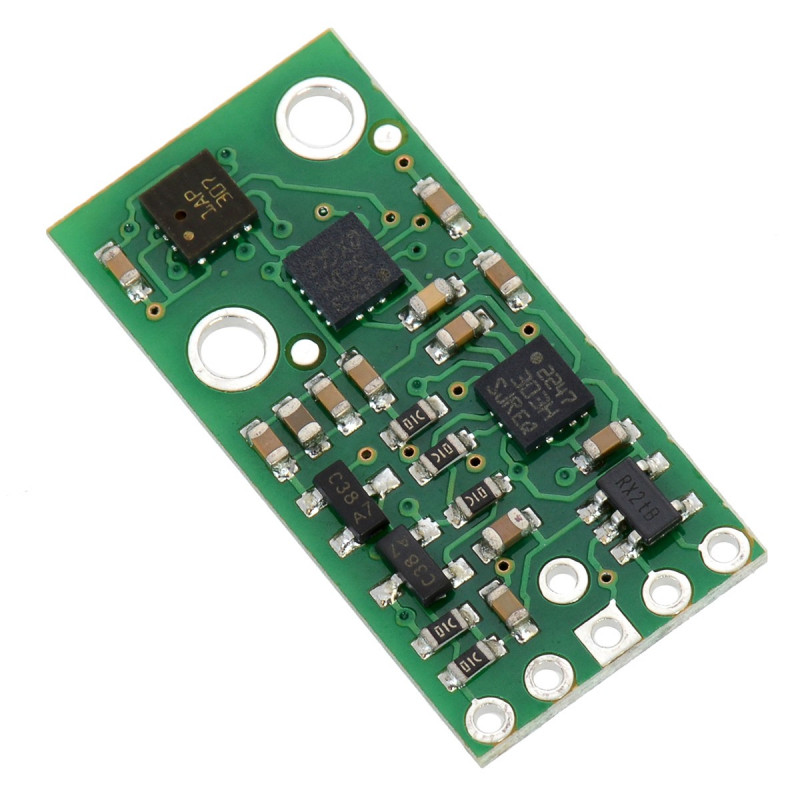
Moduł AltIMU-10 v3 to 3-osiowy akcelerometr, 3-osiowy magnetometr LSM303D, 3-osiowy żyroskop L3GD20H oraz barometr LPS331AP. Przy pomocy tych sensorów można stworzyć kompletny system AHRS (attitude and heading reference system), czyli wyznaczyć położenie obiektu w przestrzenii trójwymiarowej. Dane z barometru w prosty sposób zamieniane są na wysokość, dzięki żyroskopowi można śledzić obroty obiektu, a akcelerometr wraz z magnetometrem kompensują dryft żyroskopu oraz wyznaczają bezwzględny punkt odniesienia.
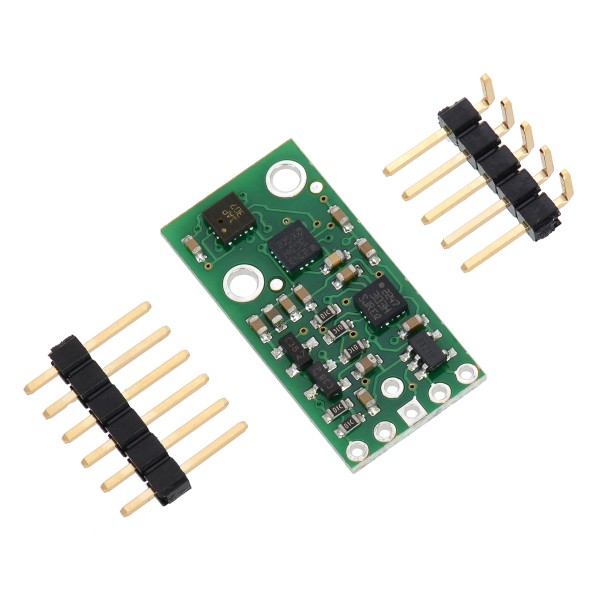
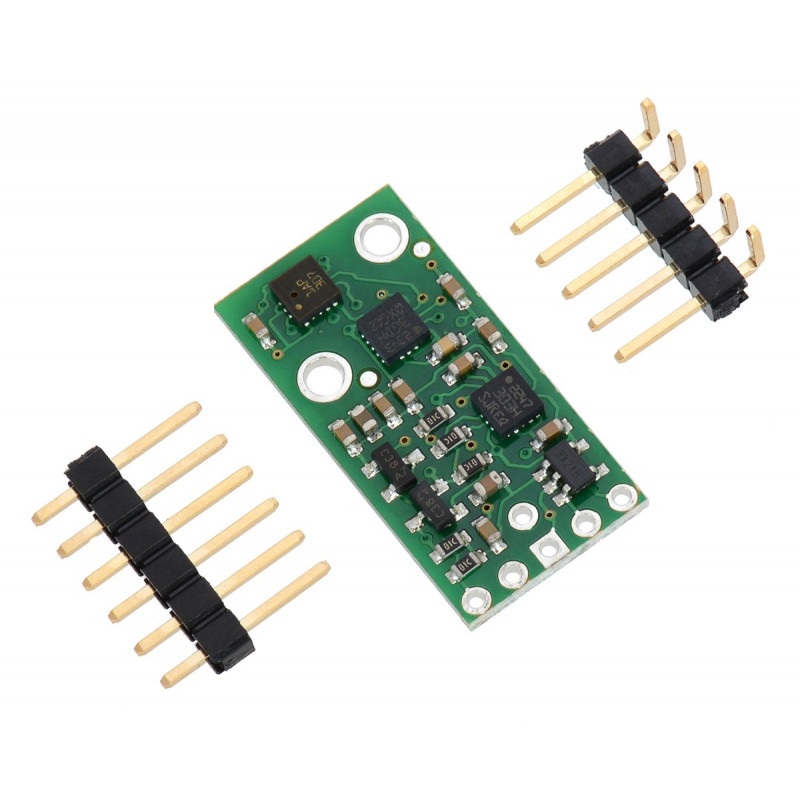
Moduł posiada regulator napięcia oraz niezbędne elementy pasywne. Wyprowadzeniami są popularne złącza goldpin, umożliwiające podłączenie czujnika za pomocą przewodów lub bezpośrednie wpięcie w płytkę stykową.
W stosunku do poprzedniej wersji, AltIMU-10 v3 posiada nowe 3-osiowe czujniki MEMS firmy ST - żyroskop L3GD20H oraz akcelerometr z magnetometrem LSM303D. Żyroskop L3GD20H posiada większą dokładność oraz zapewnia wyższą stabilność pomiarów od poprzednika. Nowy magnetometr umożliwia pomiar w szerszym zakresie - do 12 gauss. W celu możliwości podłączenia dwóch AltIMU-10 jednocześnie producent zmienił również adresację magistrali I2C. Rozkład wyprowadzeń jest w pełni zgodny z poprzednią wersją v2.
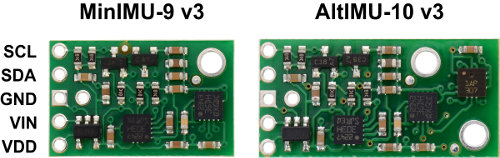
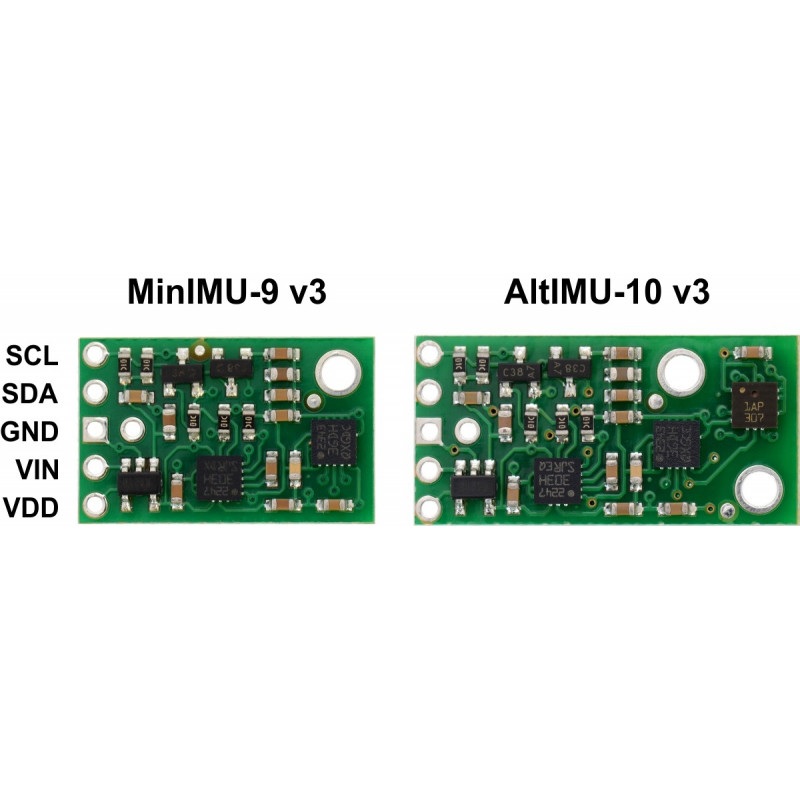
AltIMU-10 v3 jest pin-kompatybilny z modułem MinIMU-9 v3. Posiada te same funkcje z rozszerzeniem o cyfrowy barometr, który może zostać użyty jako czujnik wysokości. Poprawnie napisany kod dla MinIMU-9 v3 będzie współpracował z układem AltIMU-10 v3.
|
Produkt kompatybilny z Arduino Producent przygotował biblioteki dla żyroskopu L3G, akcelerometru LSM303 oraz barametru LPS331, które pozwalają na prostą obsługę czujników przy pomocy Arduino. |
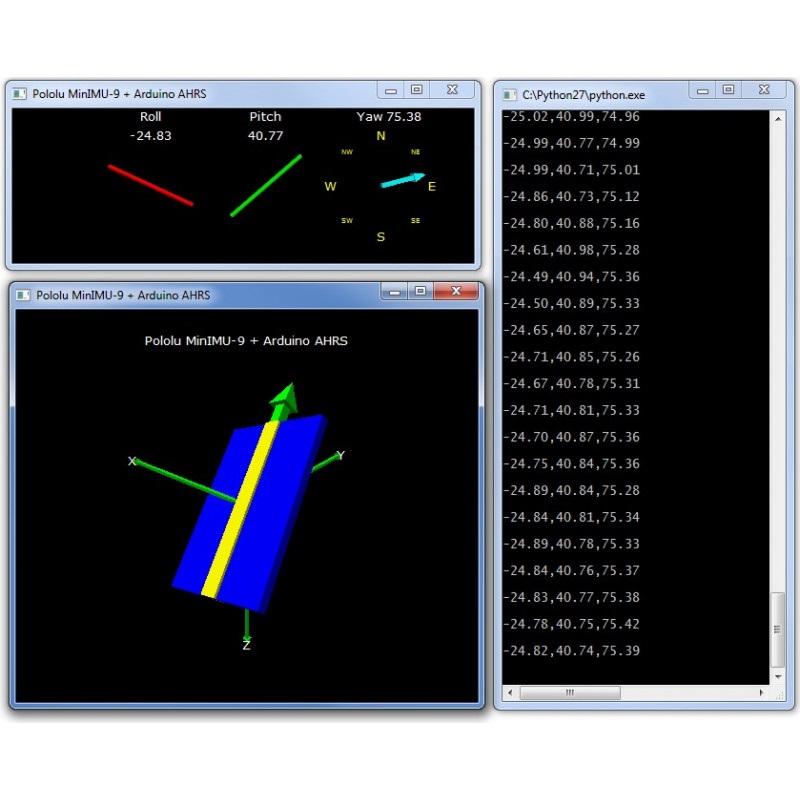
W celu pokazania możliwości modułu IMU udostępniony został przykładowy program dla Arduino. Wykorzystuje on dane z AltIMU-10 do wyznaczania współrzędnych w trzech osiach X, Y, Z, aby dokonać wizualizacji obiektu w przestrzeni 3D, tak jak pokazano na rysunki poniżej. Oprogramowanie zostało stworzone na bazie projektu Jordi Munoza, Williama Premerlani, Jose Julio i Doug Weibela.

Wizualizacja obiektu w przestrzeni 3D.
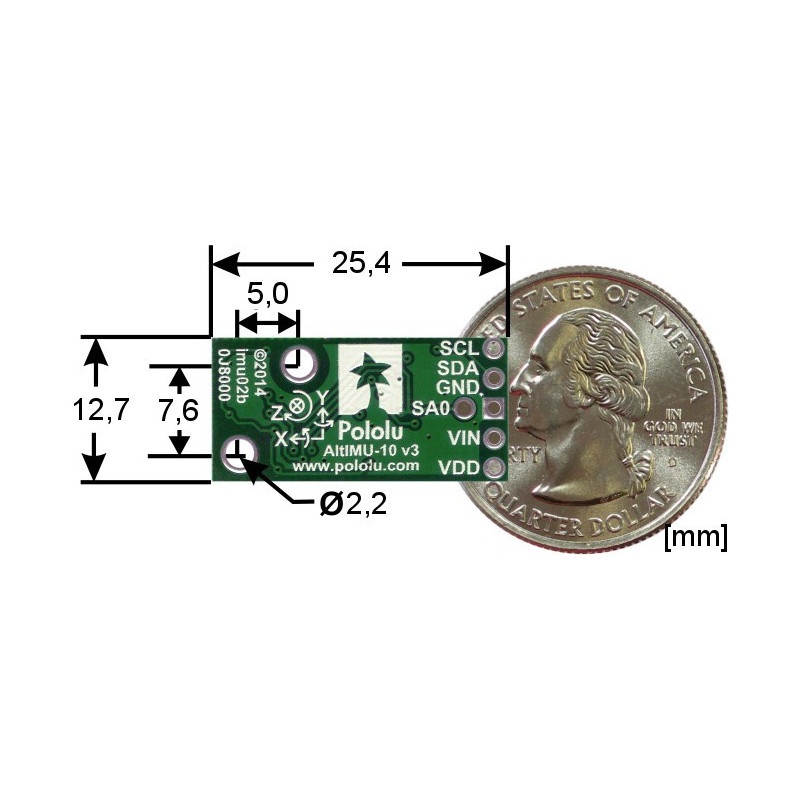
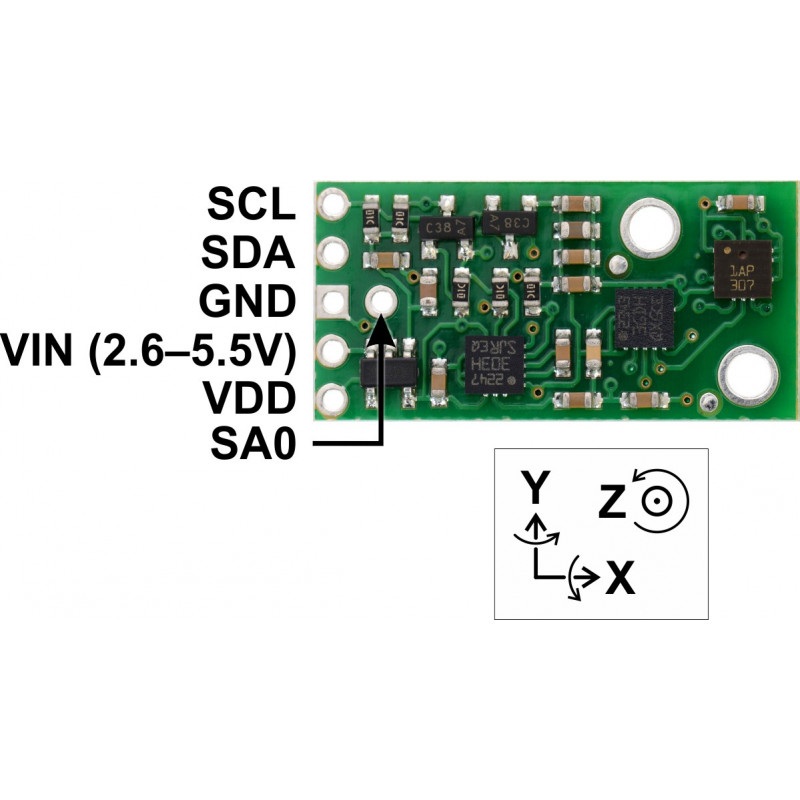
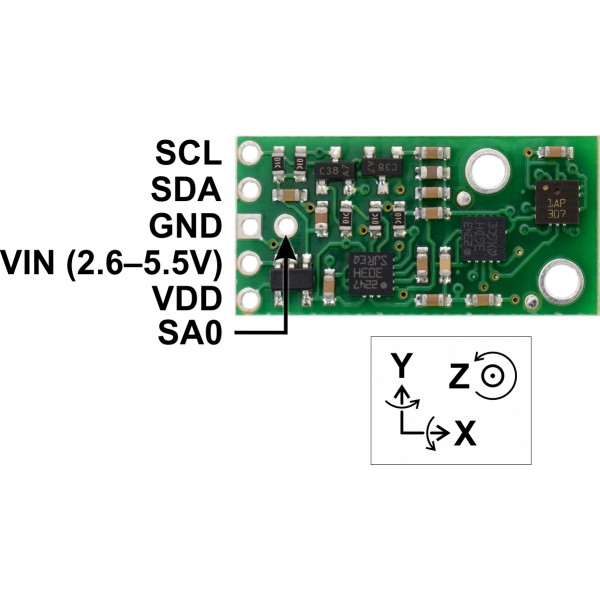
Czujnik posiada pięć wyprowadzeń do montażu złącz typu goldpin - raster 2,54 mm (w zestawie).

| PIN | Opis |
|---|---|
| SCL | Linia zegarowa magistrali I2C. Stan wysoki równy jest równy napięciu VIN. Niski GND. |
| SDA | Linia danych magistrali I2C. Stan wysoki równy jest równy napięciu VIN. Niski GND. |
| GND | Potencjał masy układu |
| VIN | Napięcie zasilania od 2,5 V do 5,5 V |
| VDD | W przypadku, gdy napięcie zasilania jest wyższe niż 3,3 V, wyprowadzenie może służyć jako wyjście napięciowe 3,3 V o wydajności prądowej do 150 mA. Gdy napięcie zasilania mieści sie w zakresie 2,5 V - 3,3 V należy podłączyć je do wyprowadzenia VDD. |
| SA0 |
Wejście umożliwiające zmianę adresacji I2C zgodnie z tabelą poniżej. Pin współpracuje z napięciem 3,3 V, podłączenie 5 V może trwale uszkodzić układ. |
Akcelerometr, magnetometr, żyroskop i barometr, znajdujące się w module, posiadają adresy 7-bitowe. Ustawione sa odpowiednio na:
| Czujnik |
Adres domyślny |
Adres SA0 w stanie niskim |
|---|---|---|
|
L3GD20H żyroskop |
1101011b | 1101010b |
|
LSM303D akcelerometer i magnetometr |
0011101b | 0011110b |
|
LPS331AP barometer |
1011101b | 1011100b |
Magistrala pracuje poprawnie z częstotliwością do 400 MHz (fast mode).
Wszystkie niezbędne informacje dotyczące komunikacji i obsługi czujników modułu AltIMU-10 znajdują się w dokumentacjach poszczególnych sensorów. Poniżej przedstawiamy kilka najważniejszych faktów:
Wizualizacja orientacji w przestrzeni na podstawie odczytów z modułu IMU.
| Szerokość opakowania | 0.001 cm |
| Wysokość opakowania | 0.001 cm |
| Głębokość opakowania | 0.001 cm |
| Masa opakowania | 0.001 kg |
Jako pierwszy zadaj pytanie dotyczące tego produktu!
Dane GPSR
Kraj pochodzenia: Polska
Dane kontaktowe producenta: BOTLAND B. DERKACZ SP. K. Gola 25A - 63-640 Bralin [email protected]
Dane kontaktowe wprowadzającego na rynek UE: BOTLAND B. DERKACZ SP. K. Gola 25A - 63-640 Bralin [email protected]