

















































































































































































































































































































































































































- Produkt wycofany










ROSbot to autonomiczna platforma robota z otwartym środowiskiem open source, bazująca na kontrolerze Core2-ROS. Robot może być wykorzystywany jako platforma edukacyjna, a także jako baza dla różnych zrobotyzowanych aplikacji, takich jak roboty inspekcyjne lub roboty serwisowe itp. Zestaw składa się z podstawowych elementów oraz czujnika Lidar.
|
Uwaga! Sprzedaż produktu została zakończona. Sprawdź inne w tej kategorii. |
ROSbot to autonomiczna platforma robota z otwartym środowiskiem open source, bazująca na kontrolerze Core2-ROS z Asus Tinker Board. Robot może być wykorzystywany jako platforma edukacyjna, a także jako baza dla różnych zrobotyzowanych aplikacji, takich jak roboty inspekcyjne lub roboty serwisowe itp. Zestaw składa się z podstawowych elementów oraz czujnika Lidar.
Robotem można sterować offline, lecz rekomendowane jest połączenie robota z chmurą Husarion Cloud, która zapewnia dostęp do wielu dodatkowych funkcji takich jak zdalne zarządzanie czy aktualizacja oprogramowania.
|
Szczegółowy opis można znaleźć w dokumentacji producenta. |
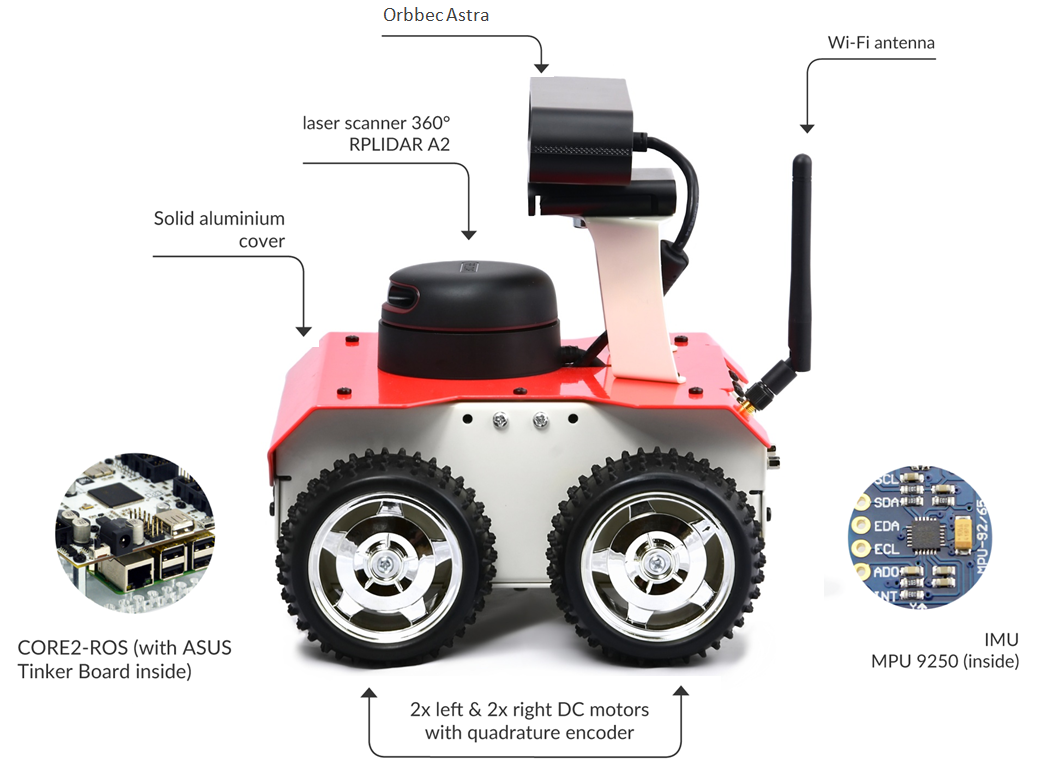
Rozkład elementów robota
Przydatne linki
|
| Podwozie - ilość kół | 4 |
| Podwozie - typ | kołowe |
| Podwozie + napęd | Tak |
| Podwozie + sterownik | Tak |
| Szerokość opakowania | 0.001 cm |
| Wysokość opakowania | 0.001 cm |
| Głębokość opakowania | 0.001 cm |
| Masa opakowania | 0.001 kg |
Jako pierwszy zadaj pytanie dotyczące tego produktu!
Dane GPSR
Kraj pochodzenia: Polska
Dane kontaktowe producenta: BOTLAND B. DERKACZ SP. K. Gola 25A - 63-640 Bralin [email protected]
Dane kontaktowe wprowadzającego na rynek UE: BOTLAND B. DERKACZ SP. K. Gola 25A - 63-640 Bralin [email protected]





