- Produkt wycofany










Zestaw do budowy robota :Move Motor opartego na module BBC micro:bit. Robot napędzany jest dwoma silnikami z dużymi kołami, posiada ultradźwiękowy czujnik odległości oraz czujniki odbiciowe do śledzenia linii. Na płytce umieszczono również buzzer, złącza do podłączenia serwa oraz otwór na ołówek, który umożliwia rysowanie podczas ruchu robota.
|
Uwaga! Sprzedaż produktu została zakończona. Sprawdź inne w tej kategorii. |
Zestaw do budowy robota Kitronik :Move Motor opartego na module BBC micro:bit. Robot napędzany jest dwoma silnikami z dużymi kołami, posiada ultradźwiękowy czujnik odległości oraz czujniki odbiciowe do śledzenia linii. Na płytce umieszczono również buzzer, złącza do podłączenia serwa oraz otwór na ołówek, który umożliwia rysowanie podczas ruchu robota.
|
Uwaga! Zestaw nie zawiera minikomputera BBC micro:bit, ani baterii AA, te elementy można nabyć osobno. |

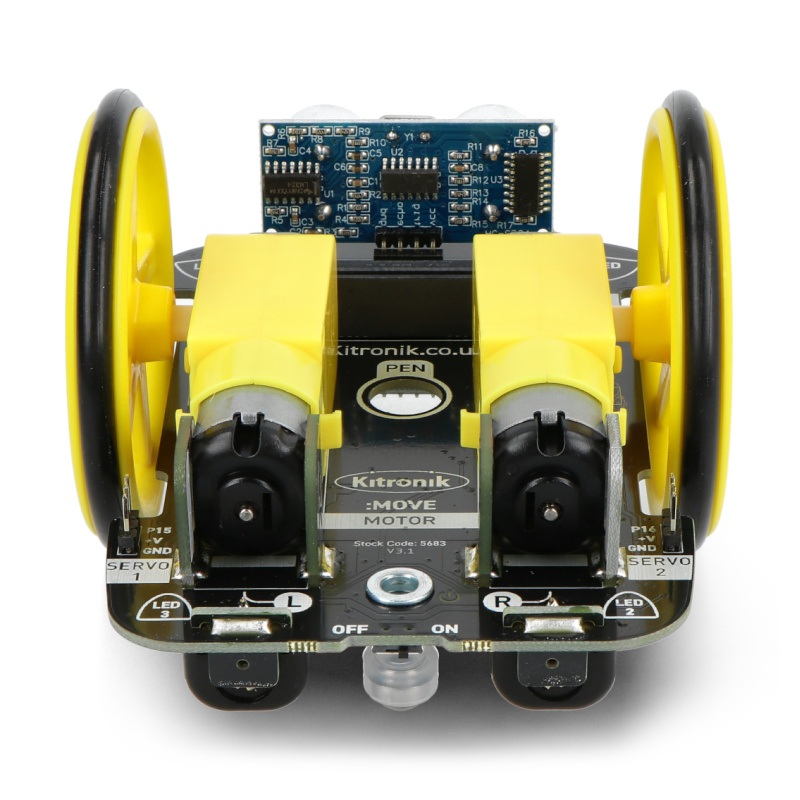
Robot Kitronik :Move Motor.
Budując robota nauczysz się podstaw ruchu, jak wykorzystać światło i dźwięk do wykrywania przeszkód i ich omijania, a także jak zaprogramować robota aby podążał za narysowaną linią. Robot został wyposażony w dwa silniki z możliwością kontrolowania prędkości oraz dwa koła z gumowymi oponami. Do sterowania robotem wykorzystywany jest moduł BBC micro:bit. Całość zasilana jest 4 bateriami AA. Robot może być programowany w środowisku graficznym - MakeCode lub tekstowym - Python.
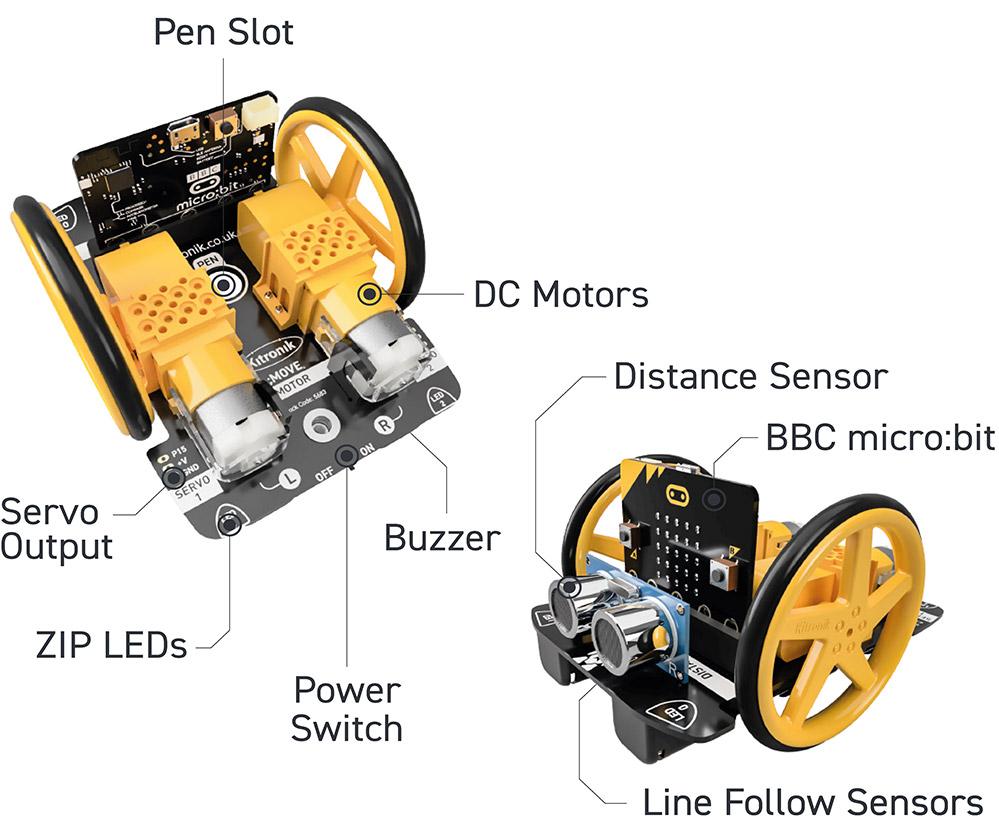 Rozkład elementów.
Rozkład elementów.
W zestawie Kitronik 5683 robota :Move Motor, znajduje się moduł ultradźwiękowego czujnika odległości HC-SR04. Zasada działania takiego czujnika, polega na generowaniu fali ultradźwiękowej (poza pasmem słyszalnym dla ucha ludzkiego). Fala ultradźwiękowa wygenerowana przez nadajnik umieszczony w czujnika, zostaje odbita od przeszkody i powraca do czujnika. Odległość czujnika od przeszkody jest obliczana na podstawie czasu trwania stanu logicznego na pinie “ECHO” modułu czujnika HC-SR04.
Na głównej płytce PCB robota :Move Motor, zostało umieszczone 3-pinowe złącze męskie, które pozwala na podłączenie zewnętrznego serwomechanizmu i rozszerzenie podstawowych możliwości robota. Dzięki temu, robot :Move Motor może zostać dodatkowo wyposażony w dodatkowe podzespoły ruchome. Sterowanie serwomechanizmem jest podobnie jak w przypadku silników napędzających robota, realizowane za pomocą modulacji szerokości impulsów (PWM).
| Podwozie - ilość kół | 2 |
| Podwozie - typ | kołowe |
| Podwozie + napęd | Tak |
| Podwozie + sterownik | Nie |
| Klasyfikacja GPSR | Komponent |
| Szerokość opakowania | 18 cm |
| Wysokość opakowania | 12.5 cm |
| Głębokość opakowania | 5 cm |
| Masa opakowania | 0.205 kg |
Jako pierwszy zadaj pytanie dotyczące tego produktu!

Informacja o produkcie
Produkt jest komponentem przeznaczonym do dalszego montażu/prototypowania. Nie stanowi on samodzielnego wyrobu gotowego w rozumieniu przepisów o bezpieczeństwie produktów.
Dane GPSR
Kraj pochodzenia: Wielka Brytania
Dane kontaktowe producenta: Kitronik Ltd, Unit 12a, Glaisdale Point, Glaisdale Parkway, Nottingham, UK. NG8 4GP. [email protected]
Dane kontaktowe wprowadzającego na rynek UE: BOTLAND B. DERKACZ SP. K. Gola 25A - 63-640 Bralin
 alkaliczna Panasonic Alkaline Power - 4szt.")
 alkaliczna Duracell Duralock - 4szt.")