
























































































































































































































































































































































































- Produkt wycofany

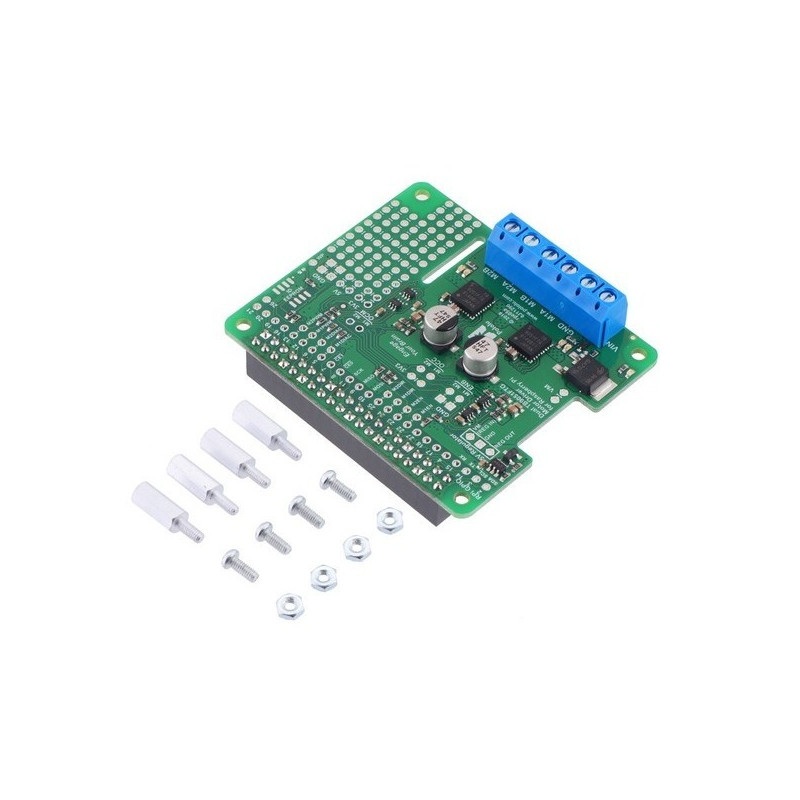












Moduł z dwukanałowym sterownikiem silników TB9051FTG pracujący z napięciami od 4,5 V do 28 V i prądem do 2,6 A na kanał (maks. 5 A). Układ można połączyć bezpośrednio ze złączami GPIO minikomputera Raspberry Pi B+, 2, 3 oraz 3+.
|
Uwaga! Sprzedaż produktu została zakończona. Sprawdź inne w tej kategorii. |
Moduł oparty na układzie Toshiba TB9051FTG pozwala kontrolować silniki o napięciu zasilania do 28 V i ciągłym poborze prądu do 2,6 A. Sterownik wytrzymuje także kilkusekundowe skoki natężenia prądu do 5 A. Prędkość obrotową można kontrolować przy pomocy sygnału PWM.

|
Ta wersja jest złożona i gotowa do pracy. W naszej ofercie dostępny jest również KIT do samodzielnego montażu. |
W połączeniu z Raspberry Pi, przy wykorzystaniu specjalnie przygotowanej biblioteki można w prosty sposób kontrolować prędkość i kierunek obrotów dwóch silników prądu stałego. Kształt i wyprowadzenia płytki pozwalają na bezpośrednie połączenie z minikomputerem, tak jak przedstawiono na rysunkach powyżej. Układ wykorzystuje 40-pinowe złącze GPIO.
|
Produkt kompatybilny z Raspberry Pi Producent udostępnia bibliotekę języka Python dla użytkowników Raspberry Pi. |

Zasilanie silników zostało oddzielone od Raspberry Pi. Napięcie z zakresu od 4,5 V do 28 V należy podłączyć do wyprowadzeń VIN i GND. Raspberry powinno być zasilane przez złącze microUSB.

Poniższa tabela przedstawia, które piny Raspberry Pi są wykorzystywane przez sterownik silników:
|
Pin RPi GPIO |
Pin sterownika |
Opis |
|---|---|---|
| 5 | Motor 1 DIAG |
Pin statusowy. Domyślnie w stanie wysokim. Gdy zostanie wykryty błąd sterownika, przechodzi w stan niski. |
| 6 | Motor 2 DIAG |
Pin statusowy. Domyślnie w stanie wysokim. Gdy zostanie wykryty błąd sterownika, przechodzi w stan niski. |
| 12 | Motor 1 PWM |
Wejście PWM do sterowania prędkością obrotową silnika. Maksymalna częstotliwość PWM wynosi 20 kHz. |
| 13 | Motor 2 PWM |
Wejście PWM do sterowania prędkością obrotową silnika. Maksymalna częstotliwość PWM wynosi 20 kHz. |
| 22 | Motor 1 EN |
Domyślnie w stanie niskim, oznacza odłączone wyjścia silników. W celu uruchomienia sterownika, należy podać stan wysoki. |
| 23 | Motor 2 EN | Domyślnie w stanie niskim, oznacza odłączone wyjścia silników. W celu uruchomienia sterownika, należy podać stan wysoki. |
| 24 | Motor 1 DIR |
Pin wyboru kierunku obrotów. W stanie niskim prąd płynie z wyjścia A do B. W stanie wysokim - z B do A. |
| 25 | Motor 2 DIR | Pin wyboru kierunku obrotów. W stanie niskim prąd płynie z wyjścia A do B. W stanie wysokim - z B do A. |
| EN | DIR | PWM | MxA | MxB | Tryb pracy |
|---|---|---|---|---|---|
| 1 | 0 | PWM | PWM (H/L) | L | Obroty w przód przy prędkości określonej PWM %. |
| 1 | 1 | PWM | L | PWM (H/L) | Obroty w tył przy prędkości określonej PWM %. |
| 1 | x | 0 | L |
L |
Hamowanie (wyjścia podłączone do masy). |
| 0 | x | x | Z | Z | Wyłączone wyjścia. |
Pozostałe wejścia i wyjścia nie są podłączone do Raspberry Pi, jednak są dostępne bezpośrednio z modułu. Płytka ustawia niektóre z wyjść w stan wysoki lub niski przez ścieżki, które należy przerwać przed podłączeniem ich do czegokolwiek innego. Poniższa tabela przedstawia domyślną konfigurację tych pinów.
|
Pin sterownika |
Opis | Domyślna konfiguracja |
|---|---|---|
| ENB |
Odwrócone wejście enable |
Domyślnie w stanie niskim (włączony) przez usuwalną ścieżkę. |
| OCC |
Wyjście zbyt dużego prądu |
Domyślnie w stanie niskim. Powiadamai o zbyt wysokim prądzie. |
| OCM |
Wyjście do monitorowania prądu |
Pozwala monitorować prąd. W przybliżeniu 500 mV / A. |
Urządzenie umożliwia zasilanie samego minikomputera z napięcia wejściowego modułu (VIN). W celu stabilizowania napięcia do wymaganego przez Raspberry Pi 5 V można wlutować przetwornicę D24V10F5 w specjalnie przygotowane otwory 5 V (napięcie wyjściowe) GND (masa) VOUT (napięcie zasilania silników). 
Oferujemy dwukanałowy sterownik silników 28V/2,6A. TB9051FTG Hat to nakładka dedykowana dla popularnego minikomputera Raspberry Pi.
Urządzenie zostało wykonane przez firmę Pololu, która specjalizuje się w produkcji elementów elektronicznych i mechanicznych do niewielkich robotów mobilnych. Dzięki takiemu sprzętowi z łatwością będziesz w stanie sprawnie sterować dwoma silnikami lub serwami (nie muszą być takie same).
Korzystając z oferowanego sterownika silników, możesz na przykład zbudować robota, w którym każde z dwóch kół będzie sterowane osobno. Kontrolując sygnały PWM dla każdego z nich jesteś w stanie sterować prędkością oraz kierunkiem obrotów wałów silników.
W naszej ofercie znajdziesz znacznie więcej akcesoriów przydatnych do budowy różnorodnych robotów. Posiadamy szeroki wybór akcesoriów do samodzielnej budowy robotów lub innych urządzeń elektronicznych, gotowe zestawy, zestawy edukacyjne, same materiały dydaktyczne, elementy elektroniczne, nawet gotowy sprzęt i wiele innych produktów z szeroko rozumianej kategorii elektroniki, robotyki i automatyki.
Przydatne linki |
| Napięcie zasil. od | 4.5 V |
| Napięcie zasil. do | 28.0 V |
| Wydajność prąd | 2.6 A |
| Ilość kanałów | 2 |
| Szerokość opakowania | 10 cm |
| Wysokość opakowania | 1.5 cm |
| Głębokość opakowania | 13 cm |
| Masa opakowania | 0.029 kg |
Jako pierwszy zadaj pytanie dotyczące tego produktu!
Kraj pochodzenia: Stany Zjednoczone
Dane kontaktowe producenta: Pololu Corporation 920 Pilot Rd. Las Vegas, NV 89119 USA [email protected]
Dane kontaktowe wprowadzającego na rynek UE: BOTLAND B. DERKACZ SP. K. Gola 25A - 63-640 Bralin






















