



General Driver board to wielofunkcyjny sterownik oparty na module ESP32-WROOM-32, który oferuje szeroki wachlarz możliwości i pozwala na rozbudowanie projektu o dodatkowe urządzenia peryferyjne. Przeznaczony jest przede wszystkim do budowy robotów, współpracuje z platformami takimi jak Raspberry Pi i Jetson Nano. Pozwala na sterowanie silnikami DC z enkoderami i bez, serwomechanizmami. Posiada także wyprowadzenie do podłączenia wyświetlacza OLED, anteny WiFi czy czujnika Lidar. Co więcej, producent wyposażył moduł także w czujniki IMU - 3-osiowy akcelerometr, 3-osiowy magnetometr z pomiarem temperatury oraz 3-osiowy żyroskop.
Moduł jest kompatybilny z Raspberry Pi i Jetson Nano.
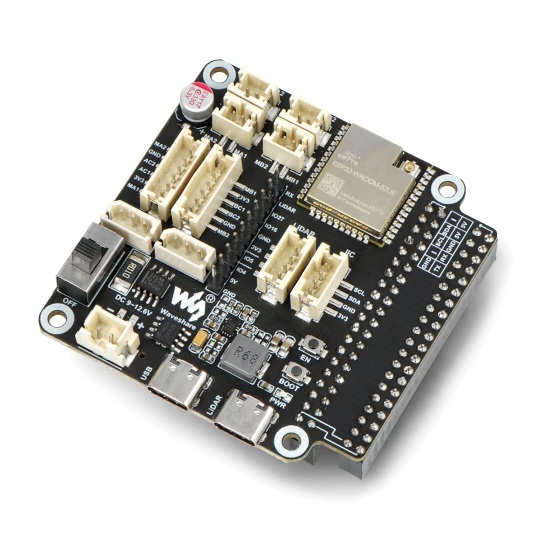
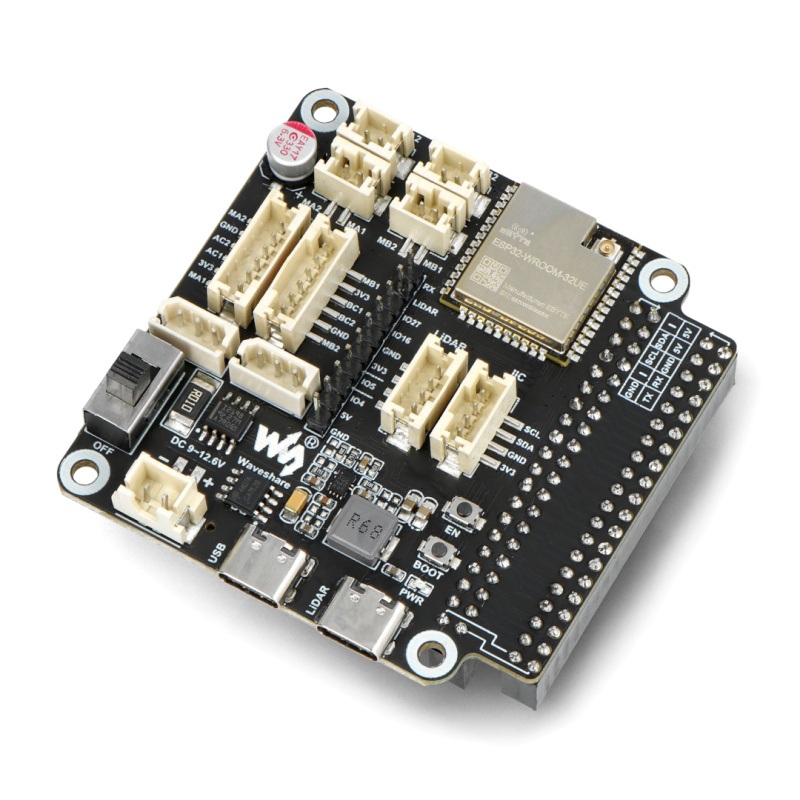
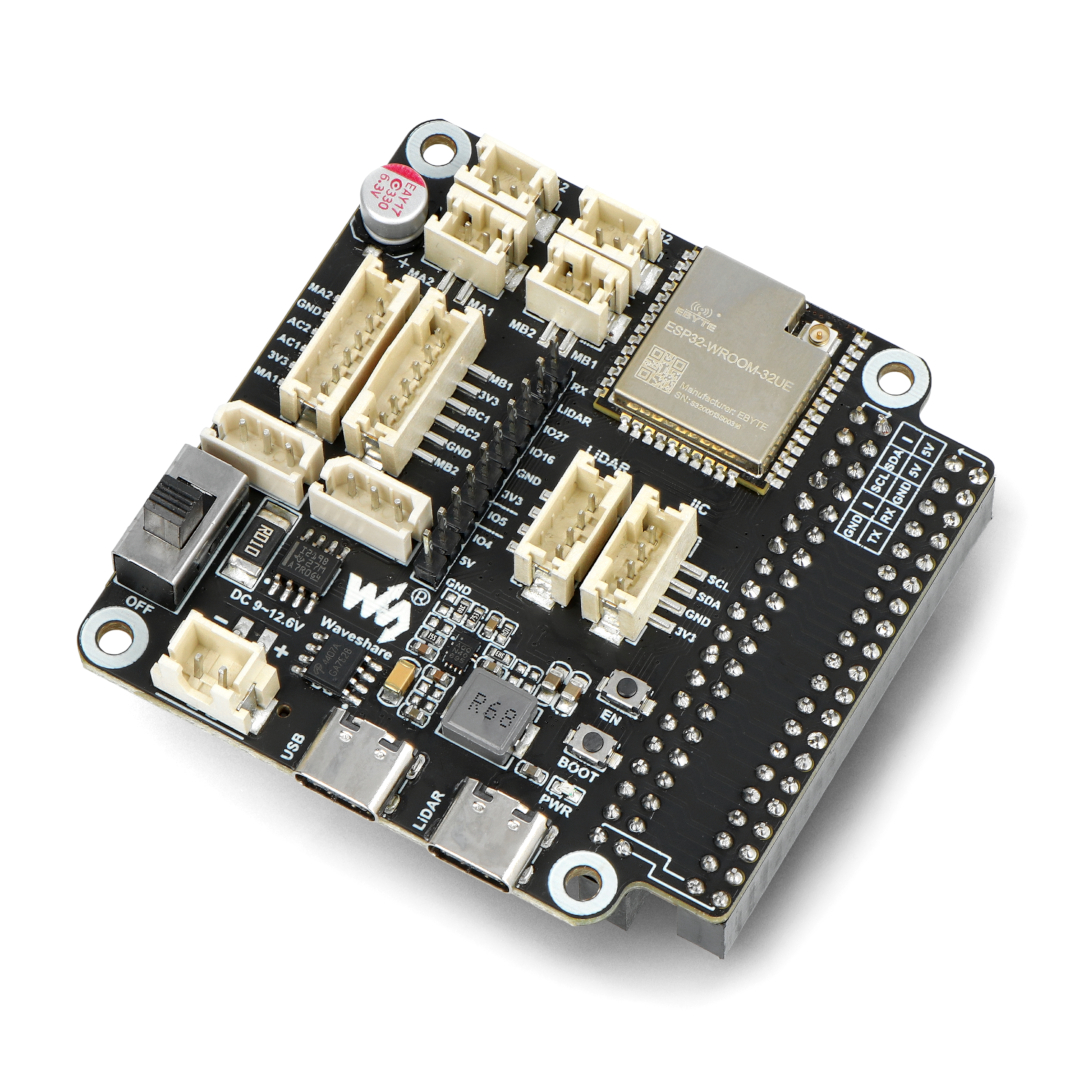 General Driver board - wielofunkcyjny sterownik do robota - ESP32 - WiFi, Bluetooth, ESP-NOW - Waveshare 23730.
General Driver board - wielofunkcyjny sterownik do robota - ESP32 - WiFi, Bluetooth, ESP-NOW - Waveshare 23730.
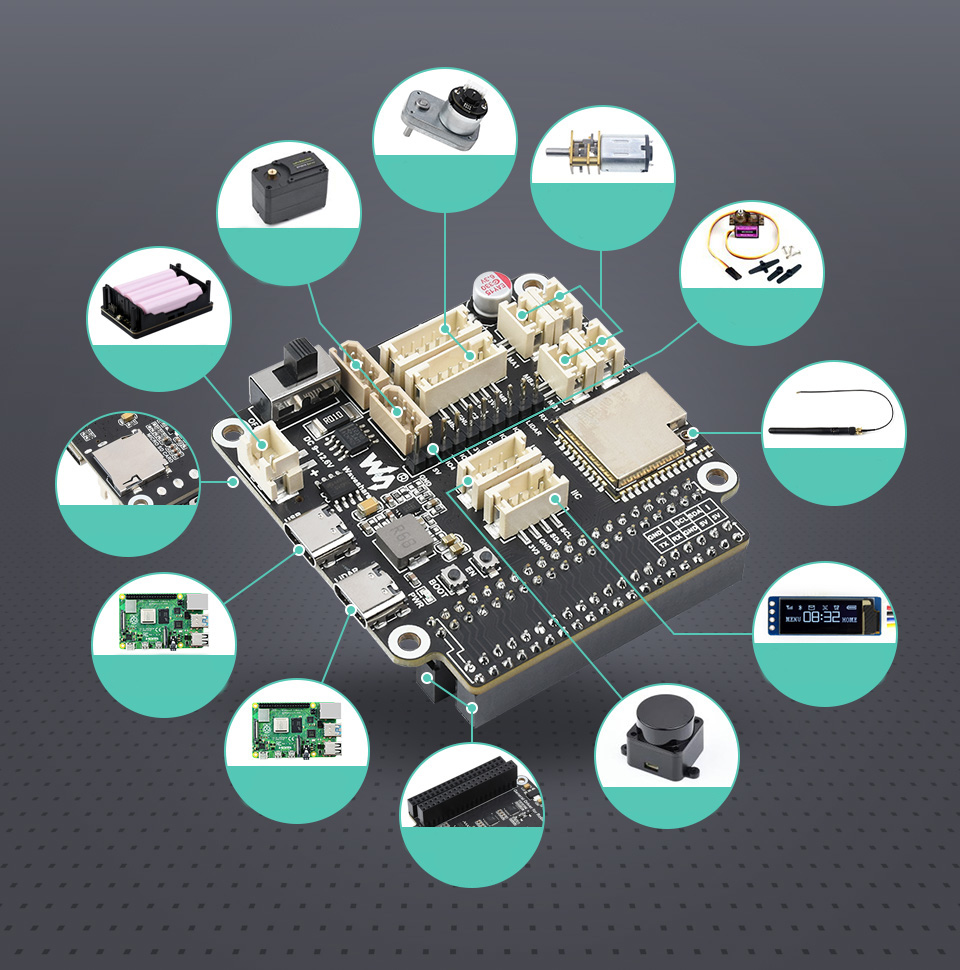
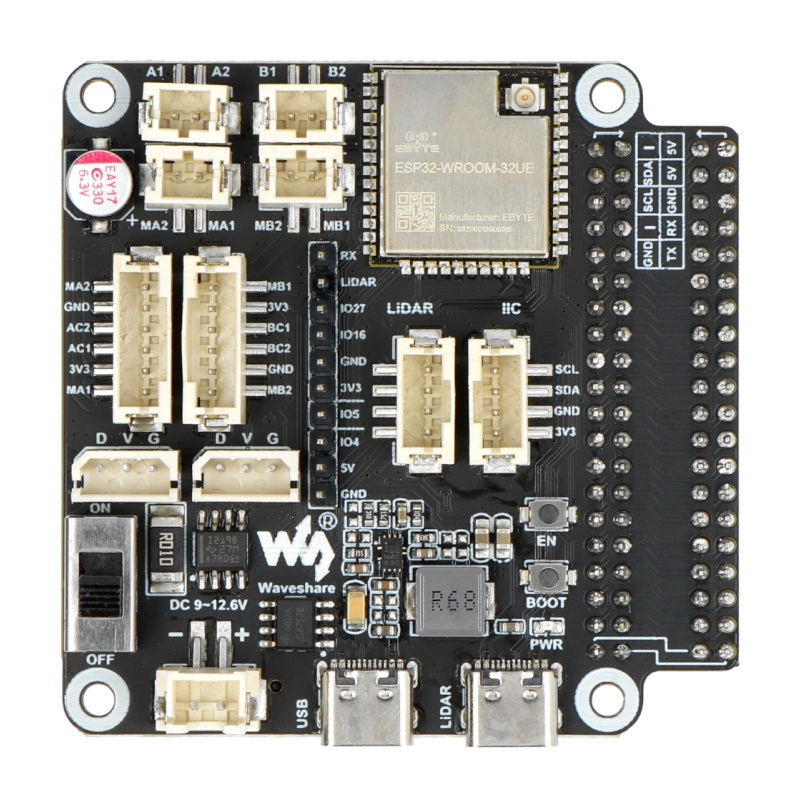
Szeroki wachlarz możliwości.
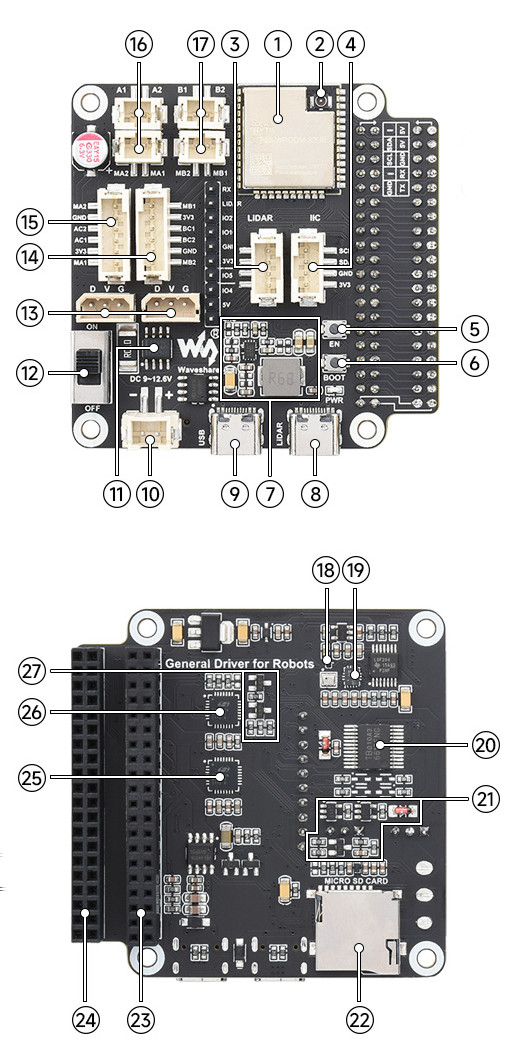
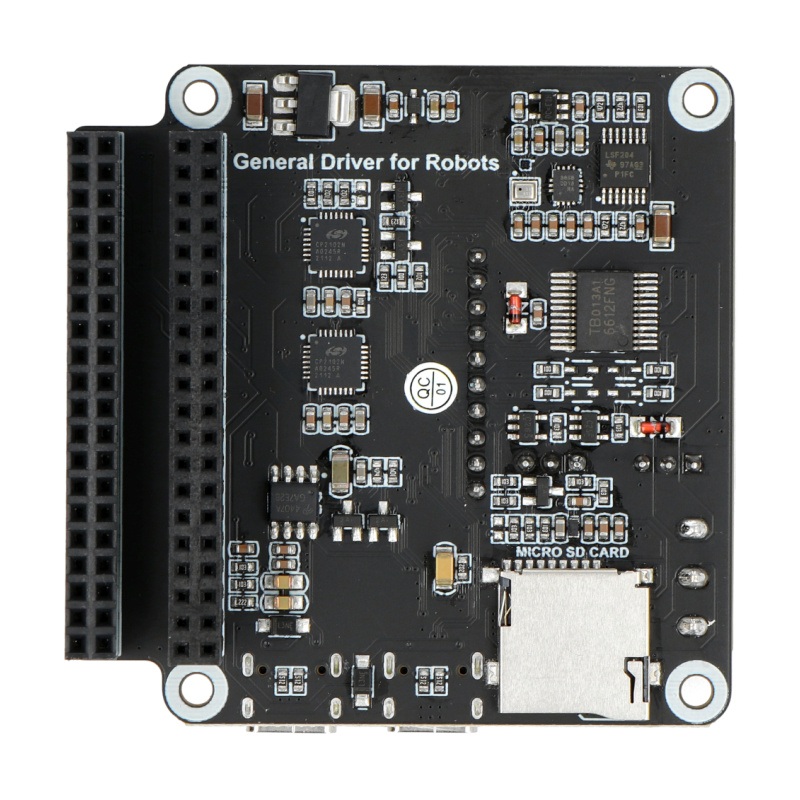
Rozmieszczenie elementów na płytce.

Elementy wchodzące w skład zestawu.
| Klasyfikacja GPSR | Komponent |
| Szerokość opakowania | 7 cm |
| Wysokość opakowania | 8 cm |
| Głębokość opakowania | 2.7 cm |
| Masa opakowania | 0.06 kg |
Jako pierwszy zadaj pytanie dotyczące tego produktu!

Informacja o produkcie
Produkt jest komponentem przeznaczonym do dalszego montażu/prototypowania. Nie stanowi on samodzielnego wyrobu gotowego w rozumieniu przepisów o bezpieczeństwie produktów.
Dane GPSR
Kraj pochodzenia: Chiny
Dane kontaktowe producenta: Seednew Limited 3/F, Building 6, Shanglilang Zhichuangyuan, Pingji Avenue, Nanwan Street, Longgang District, Shenzhen, 518115, China
Dane kontaktowe wprowadzającego na rynek UE: BOTLAND B. DERKACZ SP. K. Gola 25A - 63-640 Bralin