


































































































































































































































































































































































- Produkt wycofany




|
Uwaga! Sprzedaż produktu została zakończona. Sprawdź inne w tej kategorii. |
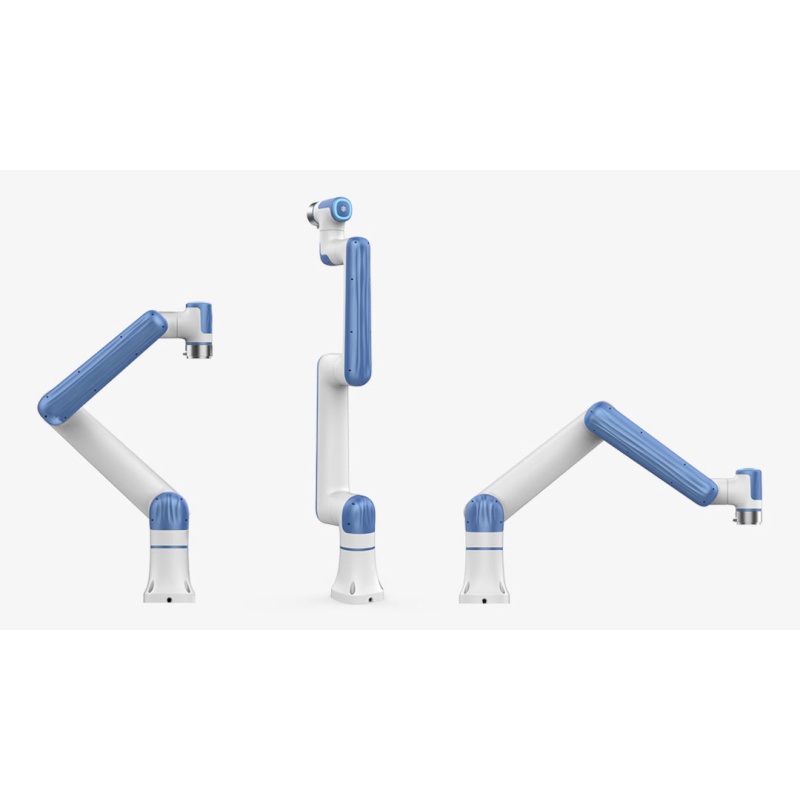
Ramię robota Dobot Nova 5, z sześcioma osiami swobody, maksymalnym zasięgiem do 850 mm i udźwigiem do 5 kg, jest zdolne do wykonywania zadań z niezwykłą precyzją, szybkością i płynnością. Dobot Nova 5 jest niewielki gabarytowo, wymaga zaledwie 1 m2 przestrzeni. Ramiona z serii Nova posiadają zakres ruchów 625 mm (Nova 2) oraz 850 mm (Nova 5). Są one o 33% - 44% lżejsze i 20% mniejsze od ramion z serii CR.
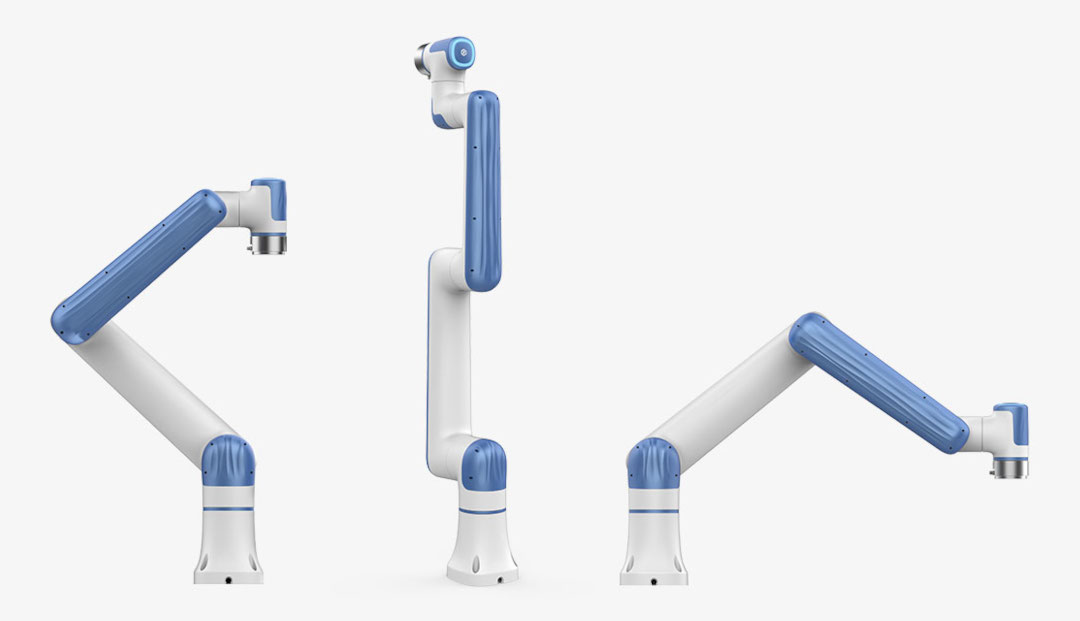
Ramię robota Dobot Nova 5.
Dobot Nova 5 jest niezwykle łatwy w obsłudze. Jego intuicyjny interfejs użytkownika, w połączeniu z zaawansowanym oprogramowaniem, sprawia, że zarówno początkujący, jak i zaawansowani użytkownicy mogą z niego korzystać z minimalnym wysiłkiem. Ramię jest w stanie odtwarzać uprzednio wykonany ruch użytkownika, a dzięki graficznemu interfejsowi, nie jest wymagana umiejętność programowania. Działania cobotów mogą być bezproblemowo monitorowane i zarządzane przez chmurę.
Bezpieczeństwo jest kluczowe dla Dobot Nova 5. Dlatego jest wyposażony w zaawansowane funkcje zabezpieczające, w tym w system awaryjnego zatrzymania, który reaguje w zaledwie 0,01 s po wykryciu kolizji. Ponadto posiada funkcję wykrywania ruchu człowieka i funkcję zatrzymania pracy po wyłączeniu zasilania. Nova 5, o maksymalnej prędkości 2 m/s, jest niezwykle adaptowalnym narzędziem. Może być stosowany w wielu dziedzinach, od hobbystycznych poprzez naukę, aż do zastosowań przemysłowych. Może służyć jako narzędzie edukacyjne do nauki programowania i robotyki, a także pełnić rolę precyzyjnej maszyny montażowej w przemyśle.
| Specyfikacja i porównanie ramion Dobot Nova | ||
|---|---|---|
| Model | Nova 2 | Nova 5 |
| Masa | 11 kg | 14 kg |
| Maksymalny udźwig | 2 kg | 5 kg |
| Zakres ruchów | 625 mm | 850 mm |
| Maksymalna prędkość TCP | 1,6 m/s | 2 m/s |
| Ilość osi swobody | ||
| J1 | ||
| J2 | ||
| J3 | ±156° | ±160° |
| J4 | ||
| J5 | ||
| J6 | ||
| J1 | 135°/s | 100°/s |
| J2 | 135°/s | 100°/s |
| J3 | 135°/s | 100°/s |
| J4 | 135°/s | 100°/s |
| J5 | 135°/s | 100°/s |
| J6 | 135°/s | 100°/s |
| Wejścia / wyjścia | ||
| Interfejs RS485 | ||
| Powtarzalność | ||
| Klasa szczelności IP | ||
| Głośność | 65 dB(A) | 70 dB(A) |
| Temperatura pracy | ||
| Typowy pobór mocy | 100 W | 230 W |
| Maksymalny pobór mocy | 250 W | 770 W |
| Orientacja instalacji | ||
| Długość przewodu od robota do kontrolera | ||
| Materiał | ||
| Kontroler | ||
| Wymiary | 200 x 120 x 55 mm | |
| Masa | 1,3 kg | |
| Napięcie wejściowe | od 30 V do 60 V DC | |
| Ilość wejść cyfrowych | 8 wejść (NPN lub PNP) | |
| Ilość wyjść cyfrowych | 8 wyjść (NPN lub PNP) | |
| Ilość wejść analogowych | 2 wejścia, napięciowe, od 0 V do 10 V | |
| Ilość wyjść analogowych | 2 wyjścia, napięciowe, od 0 V do 10 V | |
| Zdalne sterowanie zasilaniem On/Off | Tak | |
| Interfejsy sieciowy | 2, dla komunikacji TCP/IP oraz Modbus TCP | |
| Interfejs USB | 2, do podłączenia modułu bezprzewodowego USB | |
| Interfejs RS485 | 1, do komunikacji RS485 oraz Modbus RTU | |
| Temperatura pracy | od 0°C do 50°C | |
| Wilgotność pracy | do 95%, bez kondensacji | |
| Klasa szczelnośći IP | IP20 | |
| Tryb chłodzenia | Pasywne | |
| Tryb uczenia | PC, APP (Android, iOS) | |
Przydatne linki |
| Szerokość opakowania | 80.2 cm |
| Wysokość opakowania | 38 cm |
| Głębokość opakowania | 40.8 cm |
| Masa opakowania | 22.8 kg |
Jako pierwszy zadaj pytanie dotyczące tego produktu!
Kraj pochodzenia: Chiny
Dane kontaktowe producenta: SHENZHEN DOBOT CORP LTD Floor 9, 10, 14, 24, Building 2, Chongwen Park, Nanshan Zhiyuan, Liuxian Avenue, Nanshan District, Shenzhen, Guangdong China
Dane kontaktowe wprowadzającego na rynek UE: BOTLAND B. DERKACZ SP. K. Gola 25A - 63-640 Bralin [email protected]