


















































































































































































































































































































































































































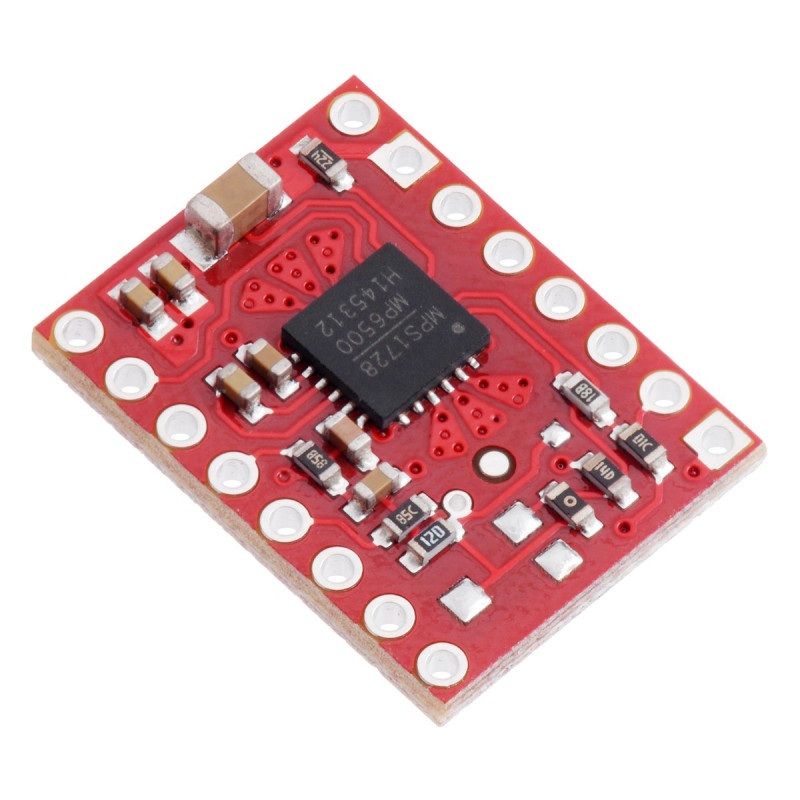







Sterownik silnika krokowego oparty o układ MP6500. Zasilany napięciem z zakresu 4,5 - 35 V, przy maksymalnym poborze prądu 2 A na cewkę. Maksymalna rozdzielczość: 1/8 kroku. Moduł pozwala na przepływ do 1,8 A prądu bez radiatora. Sterowanie prądem odbywa się cyfrowo.
|
Moduł nie posiada wlutowanych złącz goldpin. W naszej ofercie również wersja z wlutowanymi złączami. |
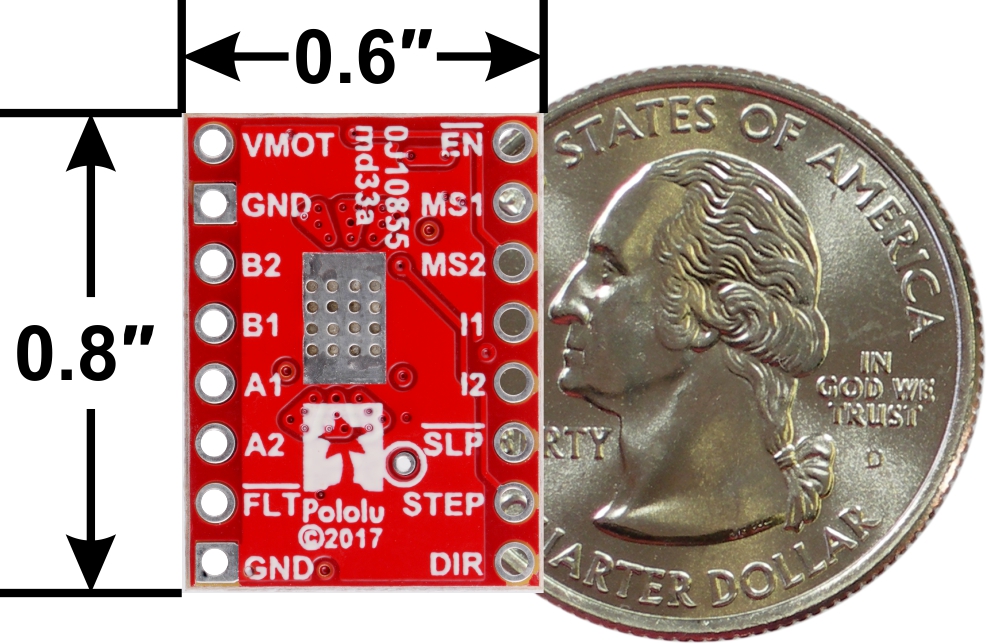
Układ umożliwia sterowanie silnikiem krokowym przy pomocy urządzenia pozwalającego generować stany logiczne np. Arduino, STM32Discovoery, Raspberry Pi lub dowolnego mikrokontrolera. Moduł Pololu charakteryzuje się bardzo prostą obsługą. Aby obrócić silnik o krok, należy podać na wyprowadzenie STEP stan wysoki (logiczną jedynkę), kolejna sekwencja zera i jedynki przesunie silnik o kolejny krok itd. Wybór kierunku odbywa się poprzez podanie odpowiedniego stanu na wyprowadzenie DIR (np. stan niski - obroty zgodnie ze wskazówkami zegara, stan wysoki - przeciwnie). Sterownik posiada również możliwość wyboru rozdzielczości pracy silnika.
Aby sterować silnikiem krokowym bipolarnym należy podłączyć układ zgodnie z poniższym rysunkiem. W przypadku sterowania silnikiem unipolarnym należy zapoznać się z instrukcją. Jeśli nominalne napięcie silnika jest niższe niż wymagane zasilanie sterownika (4,5 V) należy cyfrowo ustawić limit prądu.

Rysunek przedstawia minimalne podłączenie sterownika. Pomiędzy pinem zasilającym silnik i masą należy umieścić rezystor w wartości +/- 100 uF
Do zasilania części logicznej modułu wymagane jest napięcie z zakresu 2,5 V do 5 V, które należy doprowadzić do pinu Sleep. Napięcie zasilania silnika z zakresu od 4,5 V do 35 V podawane jest na pin VMOT. Układem można sterować silnikami o nominalnym napięciu niższym niż wymagane 4,5 V. W tym celu należy ograniczyć maksymalny pobór prądu, tak aby nie przekroczyć dopuszczalnego natężenia silnika. Np. dla silnika o rezystancji 5 Ω na cewkę i poborze prądu 1 A, nominalne napięcie zasilania to 5 V. Zasilając napięciem 12 V należy ograniczyć prąd, tak aby nie przekroczył wartości 1 A.
|
Uwaga! Podłączanie i odłączanie silnika, podczas gdy sterownik jest włączony może uszkodzić układ. |
Rozmiar kroku wybierany jest za pomocą wejść MS1, MS2. Możliwe ustawienia pokazane zostały w tabeli poniżej. Wejścia MS1 oraz MS2 mają wewnętrzny rezystor pull-down (500 kΩ).
| MS1 | MS2 | Rozdzielczość |
| niski | niski | Pełny krok |
| wysoki | niski | 1/2 kroku |
| niski | wysoki | 1/4 kroku |
| wysoki | wysoki | 1/8 kroku |
Jeden impuls podany na pin STEP powoduje jeden krok silnika w kierunku wybranym poprzez podanie odpowiedniego stanu logicznego na pin DIR. Jeżeli silnik ma się kręcić tylko w jednym kierunku można pin DIR pozostawić rozłączony.
Układ ma dwa różne wejścia do kontrolowania zasilania: SLEEP i ENBL ich opis znajduje się w dokumentacji. Należy zwrócić uwagę, że sterownik ciągnie oba te piny przez wewnętrzne rezystory obniżające 500 kΩ. Domyślnie stan SLEEP uniemożliwia działanie silnika, musi być na niego podany stan wysoki (może być podłączony bezpośrednio do zasilania logicznego od 2,5 do 5 V lub może być sterowany przez podłączenie do cyfrowego wyjścia MCU). Domyślny stanem ENBL jest włączenie sterownika, może zostać rozłączony.
Wyjście FAULT wyłącza się gdy mostki F i H są wyłączone w wyniku zabezpieczenia prądowego, przed przepięciem, wyłączenia termicznego lub zabezpieczeniami przed obniżeniem napięcia. Łączy się z pinem SLEEP za pomocą rezystora 10 kΩ, który działa podobnie jak FAULT. Gdy SLEEP posiada stan wysoki, nie jest potrzebne podłączenie FAULT.
|
Uwaga! W wyniku podłączenia SLEEP i FAULT i wystąpieniu usterki, napięcie na pinie SLEEP może spaść poniżej 2,1 V jeśli nie jest on wystarczająco wzmocniony. Zalecane jest użycie rezystora min. 4,7 kΩ z tym wyprowadzeniem lub podłączyć SLEEP bezpośrednio do VCC. |
Aby osiągnąć wysokie prędkości, zasilanie silnika zwykle musi być wyższe, niż byłoby to możliwe bez ograniczenia prądowego. Np. silnik krokowy może mieć maksymalną wartość prądową 1 A z rezystancją cewki 5 Ω, co wskazywało by na maksymalne zasilanie silnika napięciem 5 V. Używanie tego silnika z napięciem 9 V umożliwiłoby większe prędkości, ale prąd musi być ograniczony do wartości poniżej 1 A, aby zapobiec jego uszkodzeniu.
Sterownik wykorzystuje wyjścia I1 oraz I2 do ustawienia limitu prądu. Jeśli oba I1 i I2 są rozłączone, bieżący limit domyślnie wynosi 0,5 A.
| I1 | I2 | Limit prądu |
| Z | Z | 0,5 A |
| niski | Z | 1 A |
| Z | niski | 1,5 A |
| niski | niski | 2 A |
Płytka została zaprojektowana tak, aby mogła odprowadzić ciepło przy poborze prądu około 1,8 A na cewkę. Jeśli prąd będzie znacznie wyższy należy zastosować zewnętrzny radiator do którego montażu można użyć kleju termoprzewodzącego.
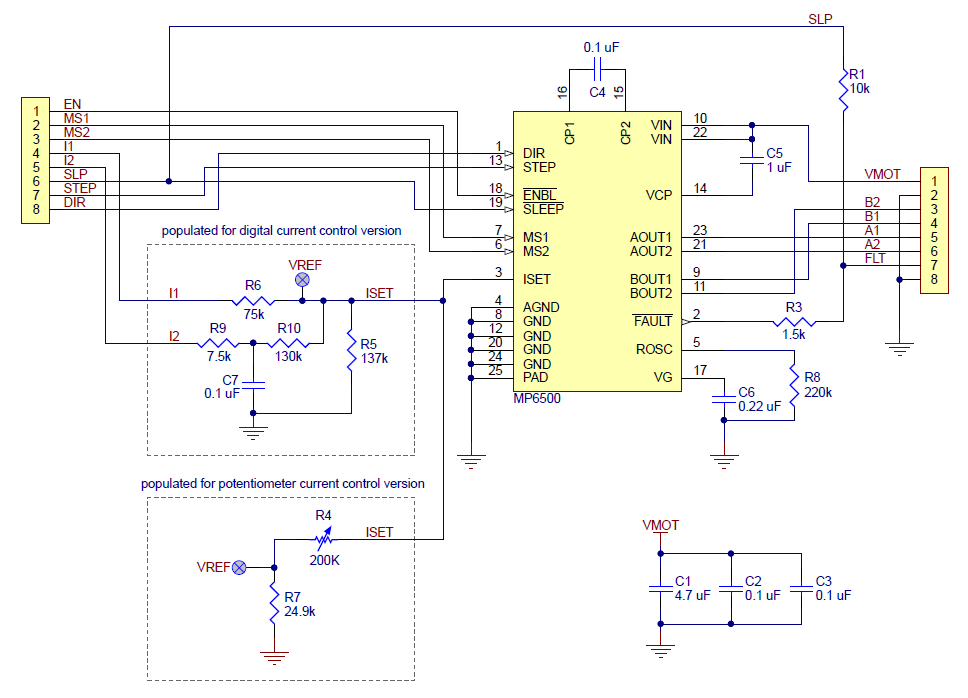
Układ zawiera niezbędne komponenty pasywne do poprawnego działania sterownika. Schemat połączeń przedstawiony został na rysunki poniżej.
Przydatne linki |
| Napięcie zasil. od | 4.5 V |
| Napięcie zasil. do | 35.0 V |
| Wydajność prąd | 2 A |
| Ilość kanałów | 1 |
| Klasyfikacja GPSR | Komponent |
| Szerokość opakowania | 7.5 cm |
| Wysokość opakowania | 0.3 cm |
| Głębokość opakowania | 8.5 cm |
| Masa opakowania | 0.003 kg |
Jako pierwszy zadaj pytanie dotyczące tego produktu!

Informacja o produkcie
Produkt jest komponentem przeznaczonym do dalszego montażu/prototypowania. Nie stanowi on samodzielnego wyrobu gotowego w rozumieniu przepisów o bezpieczeństwie produktów.
Dane GPSR
Kraj pochodzenia: Stany Zjednoczone
Dane kontaktowe producenta: Pololu Corporation 920 Pilot Rd. Las Vegas, NV 89119 USA [email protected]
Dane kontaktowe wprowadzającego na rynek UE: BOTLAND B. DERKACZ SP. K. Gola 25A - 63-640 Bralin





