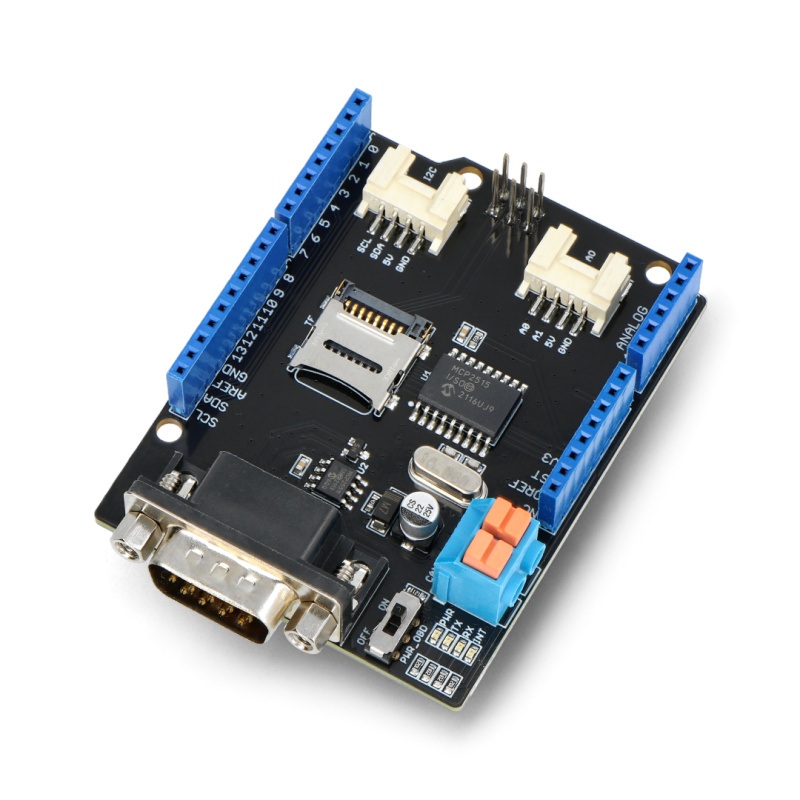






Nakładka na Arduino umożliwiająca korzystanie z magistrali szeregowej CAN. Wyposażona w układy MCP2515 oraz MCP2551. Komunikuje się przez interfejs SPI. Pracuje z napięciem 5 V.
Nakładka na Arduino umożliwiająca korzystanie z magistrali szeregowej CAN. Wyposażona w układy MCP2515 oraz MCP2551. Komunikuje się przez interfejs SPI. Pracuje z napięciem 5 V.
CAN-Bus Shield v2.0 - nakładka na Arduino.
Pełny przegląd modułu można znaleśc na stronie producenta.
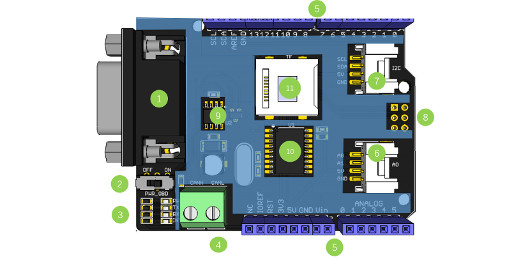
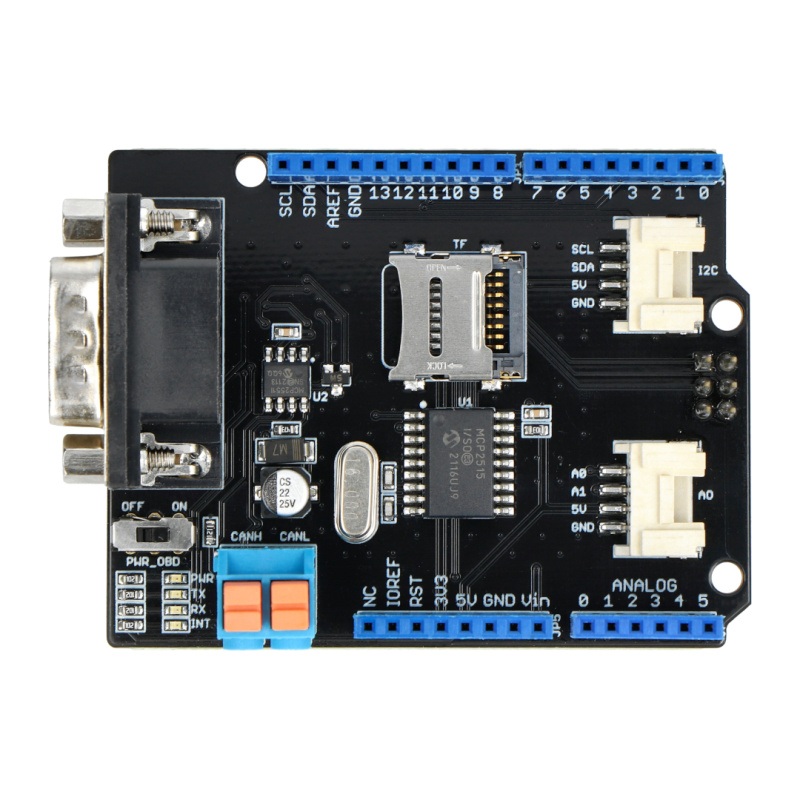
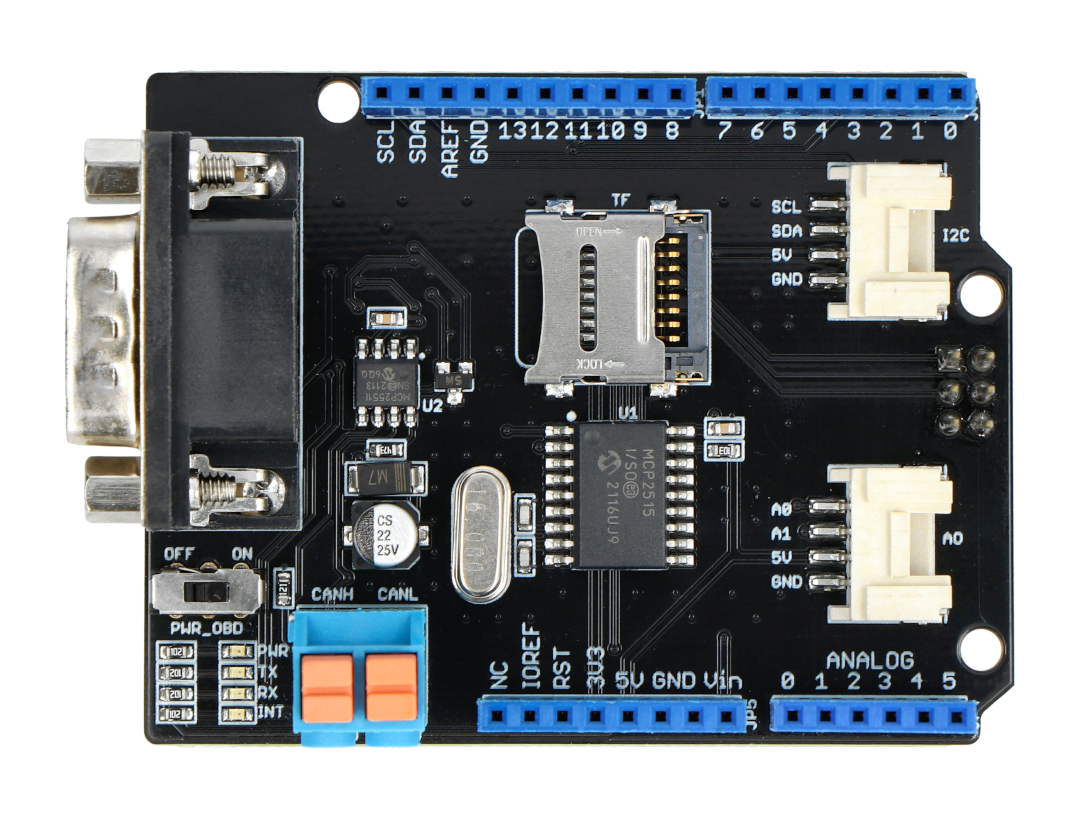
Linie magistrali CAN, czyli CANH i CANL zostały wyprowadzone na złącza śrubowe ARK oraz na gniazdo DB9. Rozkład pinów widoczny jest na rysunku poniżej.
| Nazwa | Opis |
|---|---|
|
1. Gniazdo DB-9 |
Połączenie z interfejsem OBDII przez przewód DBG - OBD. |
|
2. V_OBD |
Zasilanie z interfejsu OBDII z gniazda DB9. |
|
3. Wskaźnik LED |
|
|
4. Złącze ARK |
CAN_H i CAN_L. |
|
5. Złącza raster 2,54 mm |
Złącza do podłączenia Arduino. |
|
6. Złącze szeregowe Grove |
Złącze umożliwiające komunikacje przez port szeregowy. |
|
7. Złącze I2C Groove |
Złącze umożliwiające komunikacje przez interfejs I2C. |
| 8. Złącze ISP | Złącze umożliwiające komunikacje przez interfejs ISP. |
|
9. Układ scalony MCP2551 |
szybki nadajnik / odbiornik CAN. |
|
10. Układ scalony MCP2515 |
samodzielny kontroler CAN z interfejsem SPI. |
|
11. Slot na kartę SD |
Slot na kartę SD. |
| Klasyfikacja GPSR | Komponent |
| Szerokość opakowania | 7 cm |
| Wysokość opakowania | 3 cm |
| Głębokość opakowania | 10 cm |
| Masa opakowania | 0.048 kg |
Jako pierwszy zadaj pytanie dotyczące tego produktu!
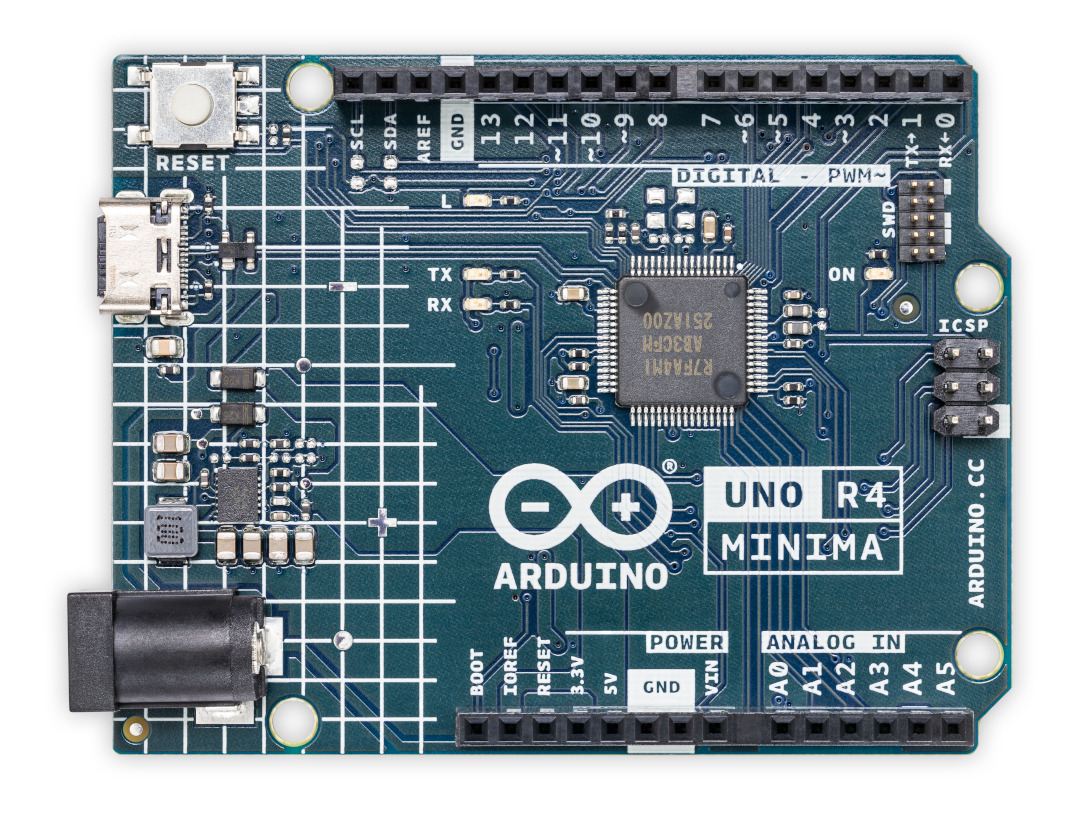
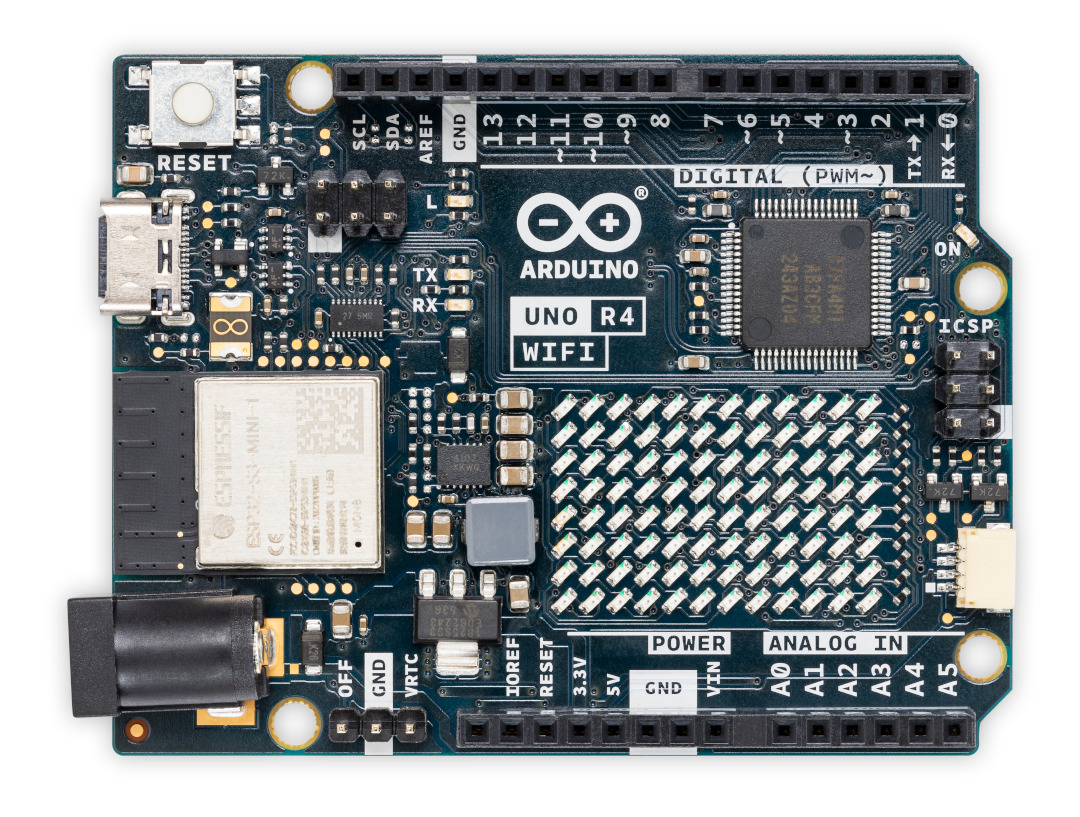
| Model |
Mikro kontroler |
Piny |
Pamięć Flash RAM EEPROM |
Zasilanie |
Interfejs |
|---|---|---|---|---|---|
|
|
Renesas RA4M1 48 MHz |
14 I/O 6 PWM 6 analog |
256 kB 32 kB - |
DC: 6-24V USB: 5V |
UART I2C SPI CAN DAC |
|
|
Renesas / ESP RA4M1 / 32-S3-Mini 48 MHz / 240 Mhz |
14 I/O 6 PWM 6 analog |
256 kB 32 kB - |
DC: 6-24V USB: 5V |
UART I2C SPI CAN DAC |
|
|
ATmega 328 16 MHz |
14 I/O 6 PWM 6 analog |
32 kB 2 kB 1 kB |
DC: 7-12V USB: 5V |
UART I2C SPI |
|
|
ATmega 4809 20 MHz |
14 I/O 5 PWM 6 analog |
48 kB 6 kB 256 B |
DC: 5-12V USB: 5V |
UART I2C SPI |
|
|
ATmega 32u4 16 MHz |
20 I/O 7 PWM 12 analog |
32 kB 2,5 kB 1 kB |
DC: 7-12V USB: 5V |
UART I2C SPI USB |
| Mega 2560
|
ATmega 2560 16 MHz |
54 I/O 16 analog |
256 kB 8 kB 4 kB |
DC: 7-12V |
UART I2C SPI |
|
|
AT91SAM 3X8E 84 MHz |
54 I/O 12 analog |
512 kB 96 kB - |
DC: 7-12V USB: 5V |
UART I2C SPI USB CAN |
|
|
STM 32H747XI 480 MHz + 240 MHz |
75 I/O 12 PWM 12 analog |
2 MB 1 MB - |
DC: 6-24V USB: 5V |
UART I2C SPI CAN |
|
|
ARM ATSAMD21G18 48 MHz |
20 I/O 10 PWM 6 analog |
256 kB 32 kB - |
DC: 7-12V USB: 5V |
UART I2C SPI |
|
|
ATmega 32u4 16 MHz |
20 I/O 12 analog |
32 kB 2,5 kB 1 kB |
DC: 7-12V USB: 5V |
UART I2C SPI |
|
|
ATmega 328 16 MHz |
22 I/O 8 analog |
32 kB 2 kB 1 kB |
DC: 7-12V USB: 5V |
UART I2C SPI |
|
|
ATmega 328 16 MHz |
14 I/O
6 PWM 6 analog |
32 kB 2 kB 1 kB |
DC: 7-12V USB: 5V |
UART I2C SPI |

Informacja o produkcie
Produkt jest komponentem przeznaczonym do dalszego montażu/prototypowania. Nie stanowi on samodzielnego wyrobu gotowego w rozumieniu przepisów o bezpieczeństwie produktów.
Dane GPSR
Kraj pochodzenia: Chiny
Dane kontaktowe producenta: Seeed Technology Co.,Ltd. Tower B 1/F, Shanshui Building, NanshanYungu Innovation Industry Park, Liuxian Ave. No. 1183 CN 518055 Shenzhen [email protected]
Dane kontaktowe wprowadzającego na rynek UE: BOTLAND B. DERKACZ SP. K. Gola 25A - 63-640 Bralin