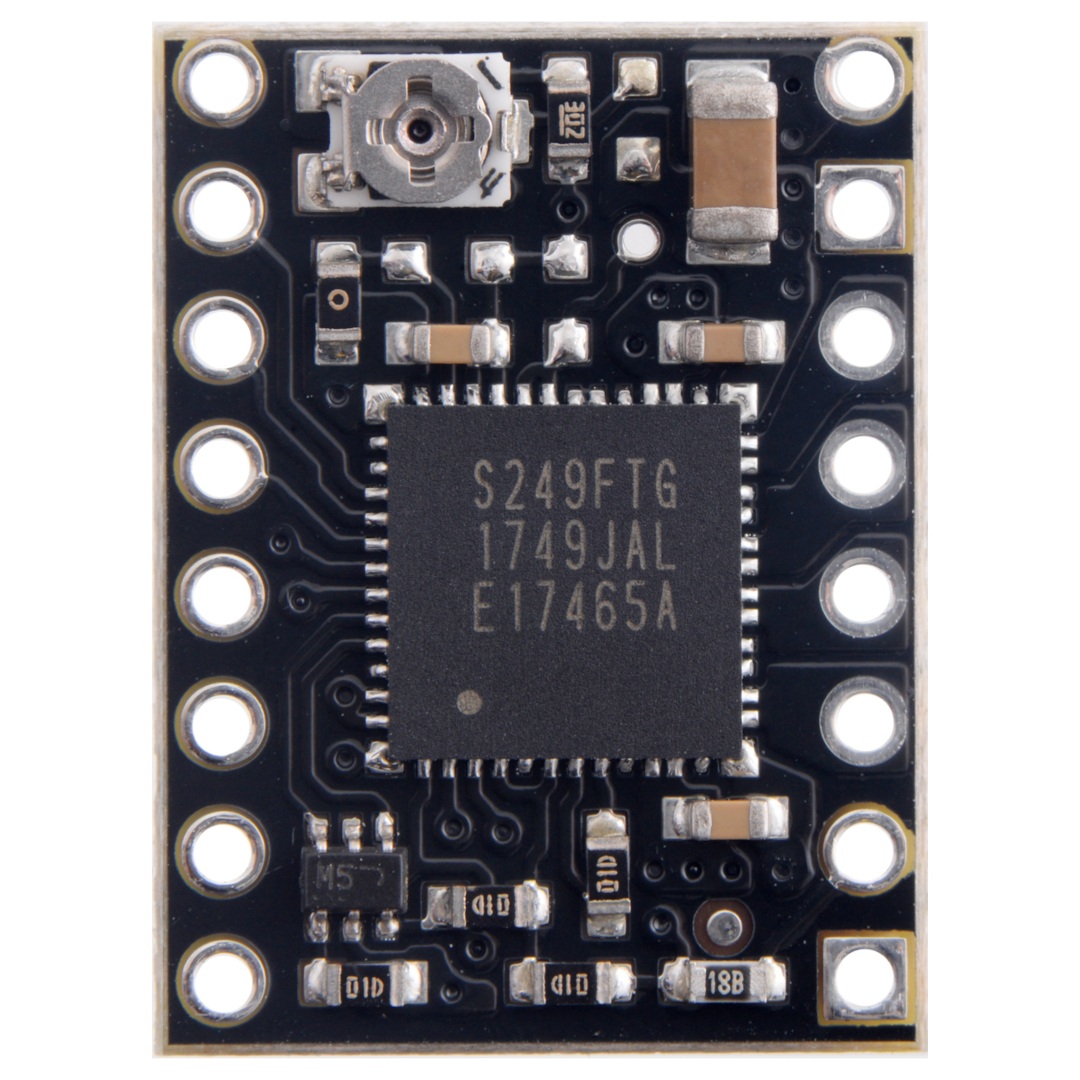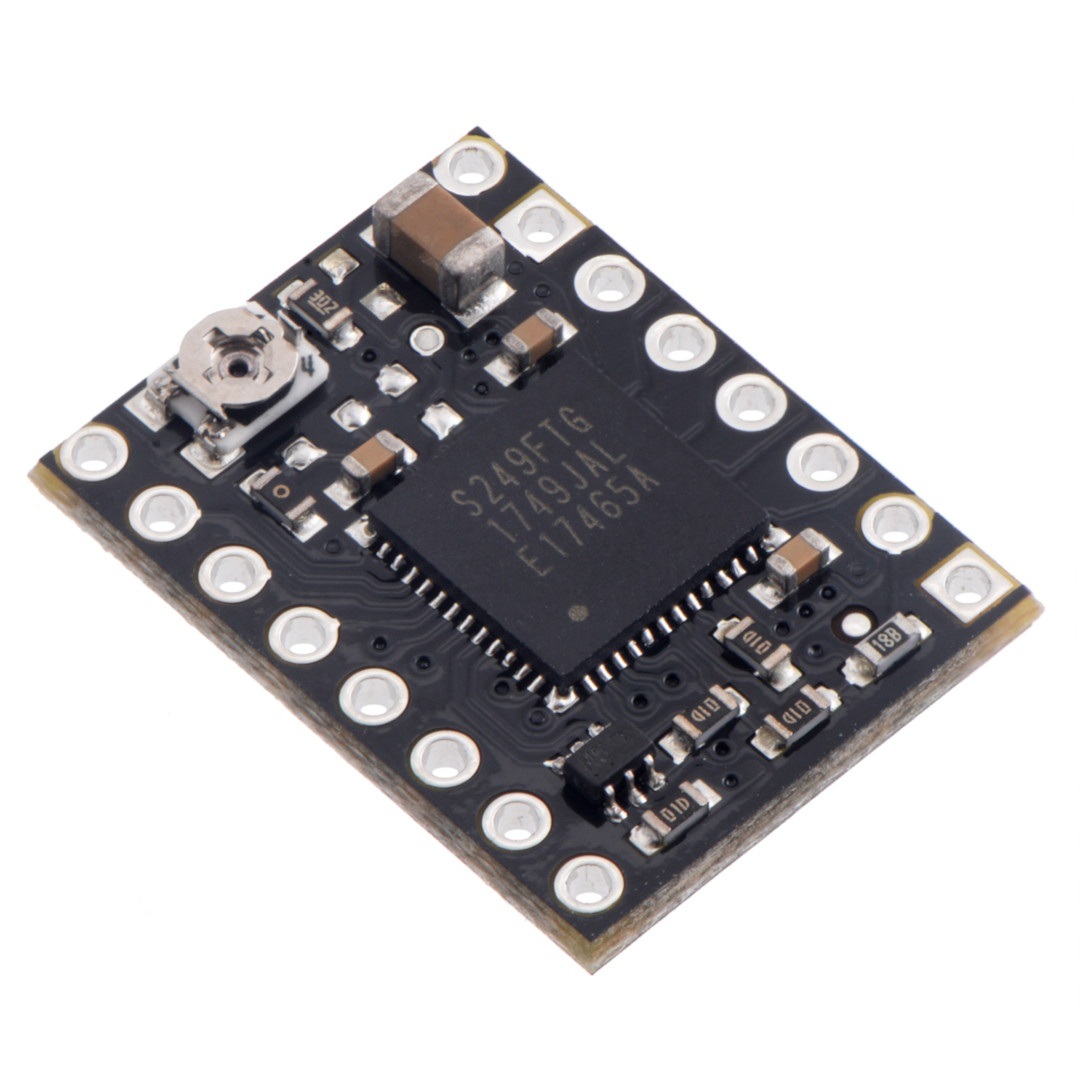










































































































































































































































































Sterownik silnika krokowego oparty o układ TB67S279FTG. Zasilany napięciem z zakresu 10 - 47 V, przy maksymalnym poborze prądu 4,5 A na cewkę. Maksymalna rozdzielczość: 1 / 32 kroku. Dzięki zastosowaniu sterownika TB67S279FTG, układ może oddać więcej ciepła co pozwala na przepływ prądu 1,6 A bez radiatora.
Układ umożliwia sterowanie silnikiem krokowym przy pomocy urządzenia pozwalającego generować stany logiczne np. Arduino, STM32Discovoery, Raspberry Pi lub dowolnego mikrokontrolera. Moduł Pololu charakteryzuje się bardzo prostą obsługą. Rosnące zbocze każdego impulsu na wyprowadzeniu CLK (STEP) odpowiada jednemu krokowi. Wybór kierunku odbywa się poprzez podanie odpowiedniego stanu na wyprowadzenie CW/CCW (DIR) (np. stan niski - obroty zgodnie ze wskazówkami zegara, stan wysoki - przeciwnie). Sterownik posiada również możliwość wyboru rozdzielczości pracy silnika.
Moduł nie posiada wlutowanych złącz goldpin.
W naszej ofercie również wersja z wlutowanymi złączami.
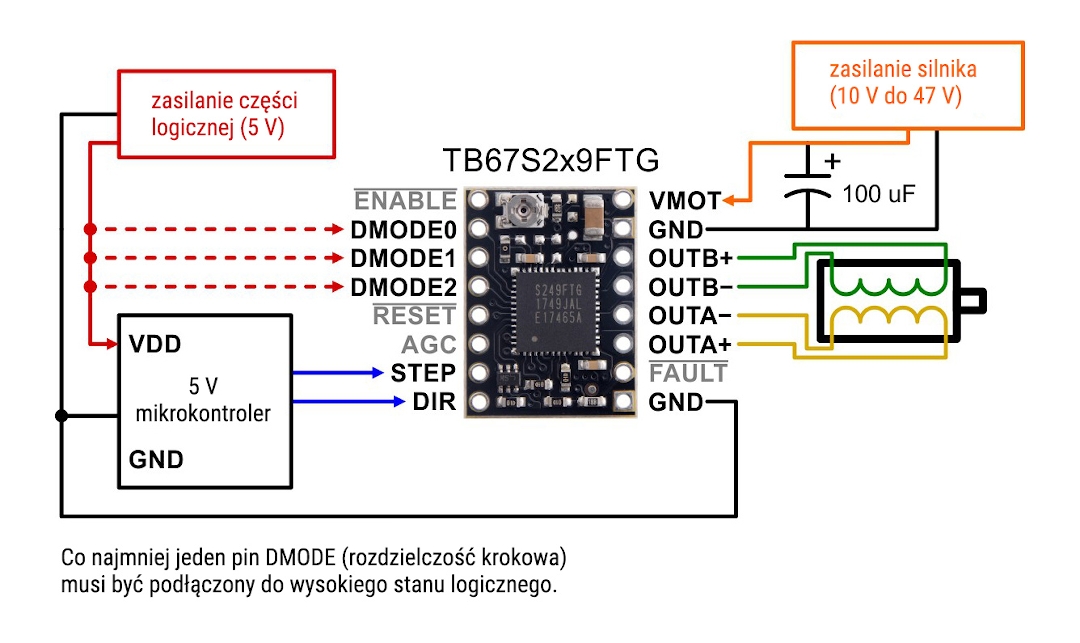
Minimalny schemat połączeń do podłączenia mikrokontrolera do TB67S2x9FTG.
Sterownik wymaga napięcia zasilania od 10 V do 47 V które będzie podłączone do wyprowadzeń VIN i GND.
Aby sterować silnikiem krokowym bipolarnym należy podłączyć układ zgodnie z poniższym rysunkiem.
Do zasilania części logicznej modułu wymagane jest napięcie 5 V, które należy doprowadzić do pinu VDD. Napięcie zasilania silnika z zakresu od 10 V do 47 V podawane jest na pin VIN.
|
Uwaga! Podłączanie i odłączanie silnika, podczas gdy sterownik jest włączony może uszkodzić układ. |

Wymiary sterownika TB67S249FTG.
Rozmiar kroku wybierany jest za pomocą wejść DMODE0, DMODE1, DMODE2. Możliwe ustawienia pokazane zostały w tabeli poniżej. Wejścia MS1, MS2 oraz MS3 mają wewnętrzny rezystor pull-down (100kΩ).
| MS1 | MS2 | MS3 | Rozdzielczość |
| niski | niski | niski | Tryb czuwania |
| niski | niski | wysoki | Pełny krok |
| niski | wysoki | niski | niekołowe pół kroku ("a") |
| niski | wysoki | wysoki | 1/4 kroku |
| wysoki | niski | niski | kołowe pół kroku ("b") |
| wysoki | niski | wysoki | 1/8 kroku |
| wysoki | wysoki | niski | 1/16 kroku |
| wysoki | wysoki | wysoki | 1/32 kroku |
Rosnące zbocze każdego impulsu na wyprowadzeniu CLK (STEP) odpowiada jednemu krokowi. Wybór kierunku odbywa się poprzez podanie odpowiedniego stanu na wyprowadzenie CW/CCW (DIR) (np. stan niski - obroty zgodnie ze wskazówkami zegara, stan wysoki - przeciwnie). Jeśli silnik ma się kręcić tylko w jednym kierunku pin DIR można na pozostawić nie wpięty.
Kiedy pin RESET przejdzie w stan wysoki sterownik resetuje swój stan w tablicy translatora, który wyprowadza do początkowej wartości 45°. Odpowiada to 100% aktualnego limitu na obu cewkach w pełnych krokach i niekołowych trybach pół etapowych. Pin RESET nie wyłącza wyjść silnika, sterownik będzie kontynuował dostarczanie prądu do silnika lecz nie będzie dawał informacji do wyjścia CLK.
TB67S2x9FTG może wykryć kilka stanów błędów, które zgłaszają, powodując niski poziom jednego lub obu styków LO. Producent zamieścił w dokumentacji tabelę kombinacji błędów na pinach LO1 i LO2.
Dokładny opis każdego pinu można znaleźć na stronie producenta.
Przydatne linki |
| Szerokość opakowania | 8 cm |
| Wysokość opakowania | 0.4 cm |
| Głębokość opakowania | 8.5 cm |
| Masa opakowania | 0.004 kg |
Jako pierwszy zadaj pytanie dotyczące tego produktu!
Kraj pochodzenia: Stany Zjednoczone
Dane kontaktowe producenta: Pololu Corporation 920 Pilot Rd. Las Vegas, NV 89119 USA [email protected]
Dane kontaktowe wprowadzającego na rynek UE: BOTLAND B. DERKACZ SP. K. Gola 25A - 63-640 Bralin