






































































































































































































































































































































































































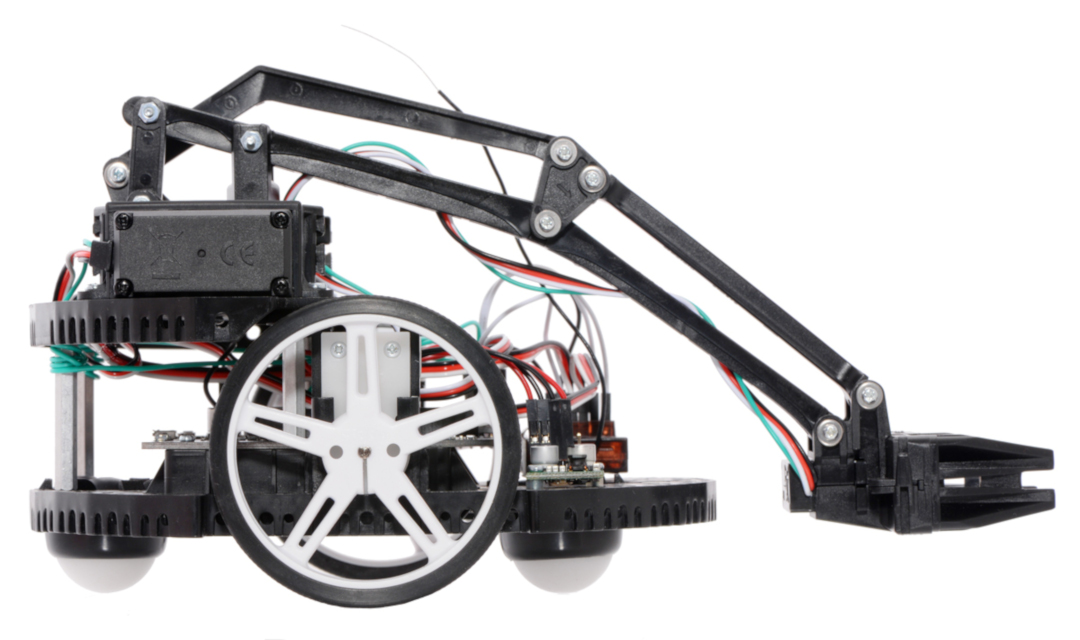
Zestaw do budowy ramienia robota dla podwozia Pololu Romi. Ramię wyposażone w 3 serwomechanizmy do regulacji wysokości ramienia, sterowania chwytakiem i łopatkami chwytaka. Wszystkie są specjalnie zmodyfikowane, zapewniając dostęp do potencjometrów sprzężenia zwrotnego, umożliwiając kontrolę we wszystkich trzech połączeniach.
Zestaw do budowy ramienia robota dla podwozia Pololu Romi. Ramię wyposażone w 3 serwomechanizmy do regulacji wysokości ramienia, sterowania chwytakiem i łopatkami chwytaka. Wszystkie są specjalnie zmodyfikowane, zapewniając dostęp do potencjometrów sprzężenia zwrotnego, umożliwiając kontrolę we wszystkich trzech połączeniach.
Ramię umożliwia podnoszenie niewielkich elementów. Zestaw zawiera chwytak umożliwiający podnoszenie przedmiotów o szerokości do 32 mm, ramiona podtrzymujące chwytak i platformę do montażu.
Przedmiotem sprzedaży jest jedynie zestaw do budowy ramienia, pozostałe elementy można nabyć osobno.
Ramię Romi jest montowane na tylnej połowie podwozia, nad silnikami przy pomocy aluminiowych dystansy. Dwa standardowe serwa umieszczone na podstawie ramienia sterują wysokością oraz kątem pochylenia chwytaka, micro serwo jest umieszczone wewnątrz chwytaka sterując jego łopatkami. Większe serwomechanizmy mogą krótko pracować z maksymalnym prądem 1,8 A, ale typowy pobór prądu powinien być poniżej każdego wzmacniacza. Prąd mikro serwa to w przybliżeniu 0,8 A przy 6 V. Wszystkie trzy serwa są zasilane napięciem od 4,8 V do 6 V, mogą być zasilane z poziomu baterii lub zewnętrznego zasilacza.
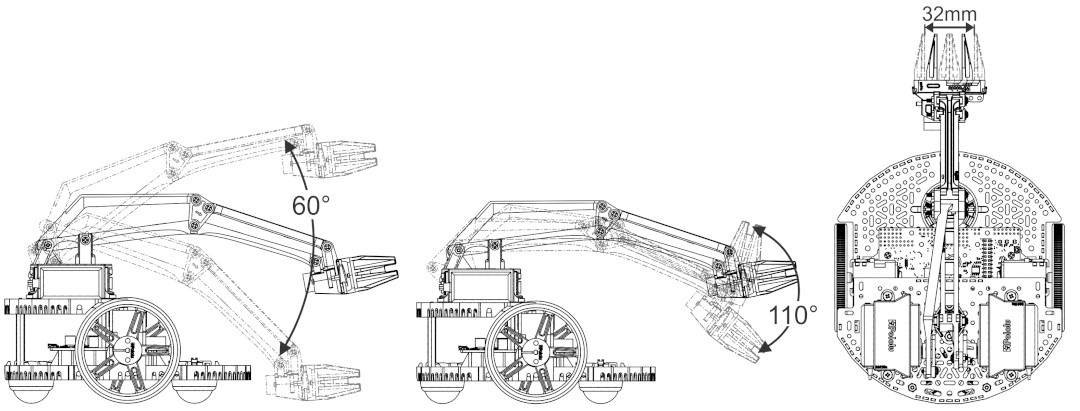
Zakresy ruchów ramienia robota.
Chwytak można zamontować na końcu ramienia w pozycji poziomej lub pionowej, wykorzystując mocowanie zębatkowe.
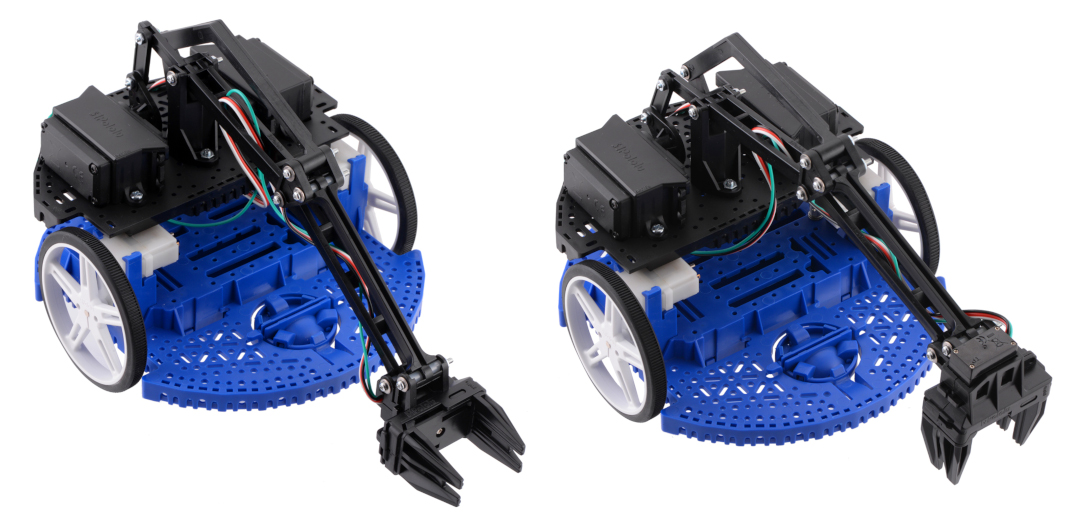
Ramię z chwytakiem zamontowanym poziomo i pionowo
Maksymalna nośność ramienia to 100 g, uchwyt posiada maksymalny rozstaw 32 mm. Całkowity zakres ruchu serwa chwytaka wymaga pulsacji pomiędzy 0,5 ms (całkowicie otwarty), a 2,4 ms (całkowicie zamknięty), co wykracza poza standardowy zakres serwomechanizmu od 1 ms do 2 ms.
Przydatne linki |
| Szerokość opakowania | 19.5 cm |
| Wysokość opakowania | 16 cm |
| Głębokość opakowania | 6 cm |
| Masa opakowania | 0.315 kg |
Jako pierwszy zadaj pytanie dotyczące tego produktu!
Kraj pochodzenia: Stany Zjednoczone
Dane kontaktowe producenta: Pololu Corporation 920 Pilot Rd. Las Vegas, NV 89119 USA [email protected]
Dane kontaktowe wprowadzającego na rynek UE: BOTLAND B. DERKACZ SP. K. Gola 25A - 63-640 Bralin




















