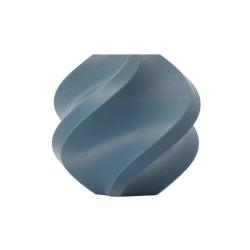
Filament AURAPOL PLA Semi-Transparent 1,75mm 1kg - Fuchsia Dream
Indeks: AUP-28494
- Nowość!
- Darmowa dostawa
Filament AURAPOL PLA Semi-Transparent 1,75mm 1kg - Fuchsia Dream



Pakiet filamentów ze szpulami Elegoo - Ekonomiczny StartPack PLA - 4szt.

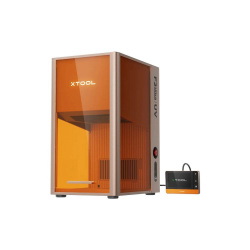
FLUX Ador - wycinarka i grawerka laserowa - 20W - zestaw podstawowy
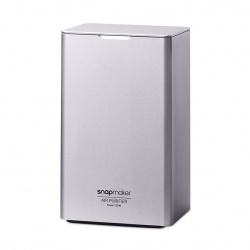
Oczyszczacz powietrza Air Purifier do Snapmaker 2.0


Siłownik elektryczny LA10 500N 13mm/s 12V - wysuw 5cm

Na pierwszy rzut oka roboty balansujące mają niewiele wspólnego z biomechaniką człowieka. To jednak tylko pozory, gdyż podstawowa zasada ich poruszania się jest wręcz żywcem skopiowana z naszej natury. Podczas poruszania się wykorzystują one tzw. równowagę dynamicznie stabilną, czyli cały czas dostosowują swoją prędkość i kierunek tak, aby utrzymać równowagę w pionowej pozycji. W naszej ofercie znajdziesz zarówno zabawne mini roboty balansujące, jak i zestawy do składania, przeznaczone dla osób zdecydowanych na dogłębne poznanie anatomii i algorytmów sterowania takich robotów.

Balboa 32u4 KIT - balansujący robot z kontrolerem A-Star - zgodny z Arduino - Pololu 3575
Balansujący robot edukacyjny do samodzielnego montażu. Platforma jest kompatybilna z Arduino, posiada możliwość programowania poprzez USB. W skład zestawu wchodzą: płytka...Zobacz również
Kołowe roboty balansujące opierają swoje sterowanie zasadniczo na odczytach z dwóch rodzajów czujników. Pierwsze – enkodery – mają za zadanie pomiar prędkości obrotowej kół napędowych. Dzięki temu kontroler robota może dokładnie ustawić żądaną prędkość i modyfikować ją na bieżąco, tak aby sprostać zadaniu utrzymywania równowagi w niezbyt wygodnej, pionowej pozycji. Drugi podstawowy typ czujnika, bez którego zbudowanie robota balansującego nie jest w ogóle możliwe, to sensor inercyjny (IMU) – akcelerometr sprzężony z żyroskopem, a obecnie najczęściej także z magnetometrem. Zadaniem algorytmu sterowania jest takie ustawienie prędkości poszczególnych kół, by w razie zbyt dużego czy szybkiego wychylenia, robot „podjechał” tak, aby powrócić do pionowej pozycji. Sensor IMU pełni w „ciele” robota dokładnie taką samą funkcję, jak błędnik u człowieka.
Do programowania algorytmów sterowania robota balansującego jest najczęściej potrzebna solidna wiedza z zakresu matematyki wyższej. Na szczęście, jeżeli wybierzesz zestaw do składania Pololu Balboa 32u4 KIT – możesz skorzystać z załączonych przez producenta przykładowych bibliotek do obsługi wszystkich niezbędnych elementów platformy. Budowa robota opiera się na kontrolerze kompatybilnym z Arduino, dzięki czemu samodzielny montaż nie nastręczy trudności związanych np. z mozolnym lutowaniem elektroniki, a Ty będziesz mógł szybko przejść do programowania swojego balansującego pojazdu. Płytka bazowa robota ma także szereg złączy, pozwalających na dołączenie dowolnych modułów, jakie sobie wymarzysz – nasz sklep oferuje wszystko, czego potrzebujesz do szybkiego rozpoczęcia pracy.
Roboty balansujące z serii Husarion Telepresence powstały z myślą o nowej formie kontaktu między ludźmi, która być może za pewien czas doprowadzi do socjologicznej rewolucji. Teleobecność – bo o niej mowa – jest możliwa dzięki przekazowi na odległość obrazu twarzy drugiej osoby i dźwięku jej mowy. Świetnie nadaje się do tego tablet, któremu dodatkowo masz możliwość poruszania się – kontroler Core2 z wydajnym mikrokontrolerem STM32F4 (ARM Cortex-M4) zapewni płynny ruch robota, a programowanie ułatwi środowisko online WebIDE, dostępne na stronie producenta. Samodzielny montaż robota jest prosty i szybki – w zestawie znajdziesz nawet śrubokręt, niezbędny do złożenia mechaniki. Ciekawe, czy za kilka lat zdalnie sterowane platformy zapewnią nam namiastkę obecności znajomych i krewnych, znajdujących się na drugim końcu świata?