






































































































































































































































































































































































- Nowość!
- Darmowa dostawa




Pakiet filamentów ze szpulami Bambu Lab - Banana Crew Pack PLA - 4szt.


Moduł głowicy laserowej do Snapmaker Artisan - 40W


Pilot zdalnego sterowania - 433,92 MHz - 4-kanałowy

Autorzy popularnonaukowych materiałów, opisujących technologie przyszłości, od wielu lat raczą nas nieprzerwanie opowieściami o mikro- i nanorobotach, które zdolne będą do realizowania precyzyjnych misji, całkowicie niewykonalnych dla większych urządzeń. Ale w robotyce amatorskiej nawet budowa kilkucentymetrowej platformy była do niedawna zupełnie poza zasięgiem entuzjasty robotyki. Postęp technologiczny wkroczył jednak także i do tej dziedziny. Oto bowiem przedstawiamy silniki DC sub-micro z przekładnią – tak małe, że trudno wyobrazić sobie jeszcze mniejsze napędy.

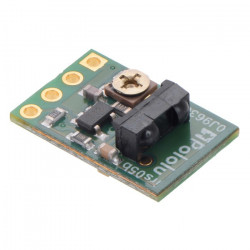
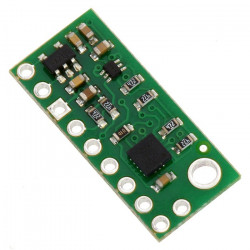
Silnik sub-micro 136:1 500 obr/min 0,6 kg*cm - Pololu 2358
Mały, cylindryczny silnik bezrdzeniowy z przekładnią planetarną 136:1 zasilany napięciem 3 - 6 V. Prędkość obrotowa wynosi 500 obr/min, moment 0,6 kg*cm. Średnica zewnętrzna to...Zobacz również
Doświadczeni elektronicy są w stanie z powodzeniem lutować elementy SMD o rozmiarach rzędu ułamka milimetra. Dostępność małych płytek, wyposażonych w mikrokontrolery – czy to AVR, czy nowoczesne ARM – także daje ogromne pole do popisu. Podobnie ma się sprawa akumulatorków litowych o rozmiarach kilkunastu milimetrów. Pozostaje więc już tylko kwestia mechaniki. Samodzielna budowa przekładni z kołami zębatymi o średnicy pojedynczych milimetrów jest niewykonalna w warunkach domowych, ale na szczęście nie jest to już konieczne – możesz kupić gotowe silniki DC sub-micro z przekładnią planetarną, które pozwolą Ci na budowę naprawdę małego robota mobilnego. W naszej ofercie znajdziesz trzy wersje tych napędów, dostosowane do różnych aplikacji.
Dostępne naszej ofercie silniki DC sub-micro z przekładnią oferują prędkości obrotowe od 90 obr/min (1,5 obr/s), poprzez 500 obr/min (8,3 obr/s), aż do 2500 obr/s (niecałe 42 obr/s). Ponieważ prędkość obrotowa wyjściowego wału przekładni rośnie wraz ze stopniem przełożenia, stąd mniejszy staje się też moment obrotowy. Dlatego najszybszy z wymienionych modeli silników DC sub-micro ma moment obrotowy 0,1 kg*cm (co jak na te wymiary jest nadal doskonałym wynikiem), średni model oferuje moment 0,6 kg*cm, a najwolniejszy – aż 0,9 kg*cm. Tak szeroki wybór pozwala na dobranie modelu silnika odpowiedniego do miniaturowego robota. W konstrukcjach wyścigowych najlepiej sprawdzi się silnik najszybszy, zaś dla zastosowań typu micro sumo warto rozważyć model średni lub najwolniejszy (ale za to oferujący najwyższy moment obrotowy).
Konstruując robota napędzanego przez silniki DC sub-micro z przekładnią warto pamiętać, że – podobnie, jak w przypadku każdego innego silnika – należy dobrać odpowiedni sterownik, który sprosta wymogom zasilania napędu. Pomimo małych wymiarów, silniki DC sub-micro mogą potrzebować natężenia prądu rzędu 400 mA – choć średni pobór prądu przy zasilaniu napięciem 6 V wynosi zaledwie 45 mA, należy liczyć się z dynamicznymi zmianami tej wartości w momentach większego obciążenia mechanicznego wału przekładni. Dlatego warto od razu przewidzieć zastosowanie akumulatora o odpowiednim prądzie rozładowania oraz postawić na wystarczająco mocny mostek H – najlepiej o prądzie maksymalnym rzędu 600 mA lub nawet 1A (na jeden kanał).