






























































































































































































































































































































































































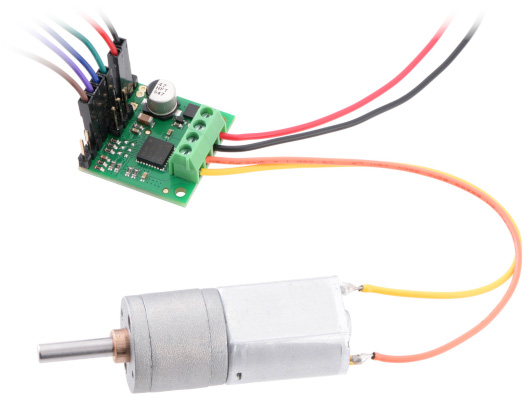
Jednokanałowy sterownik silnika DC. Ciągły prąd na kanał 2,6 A (chwilowy do 5 A). Napięcie zasilania od 4,5 V do 28 V.
Moduł oparty na układzie TB9051FTG pozwala kontrolować jeden silnik prądu stałego. Silnik może być zasilany napięciem z zakresu od 4,5 V do 28 V przy ciągłym poborze prądu do 2,6 A, chwilowym (przez kilka sekund) do 5 A. Przed użyciem zalecamy z zapoznaniem się z dokumentacją układu TB9051FTG.
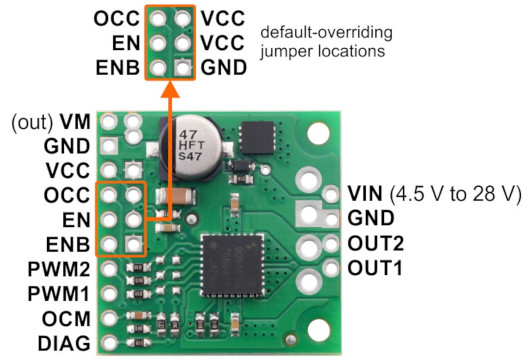
| PIN | Opis |
|---|---|
| Vin | Napięcie zasilania silnika z zakresu od 4,5 V do 28 V. Posiada zabezpieczenie przed zmianą polaryzacji napięcia zasilającego. |
| GND | Potencjał masy układu. |
| VM | Wyjście zapewniające dostęp do zasilania silnika po zabezpieczeniu przed odwrotną polaryzacją. Mogą zostać użyte do zasilania innych komponentów systemu. |
| OUT1 | Wyjścia - do podłączenia wyprowadzeń silnika. |
| OUT2 |
Wyjścia - do podłączenia wyprowadzeń silnika. |
| VCC | Napięcie logiczne - 5 V. |
| OCC | W razie prądu przetężeniowego sterownik zostaje wyłączony. Domyślnie w stanie niskim. Jeśli jest w stanie wysokim automatycznie próbuję wznowić pracę po krótkim odstępie czasu. |
| EN | Gdy jest w stanie niskim wyjścia OUT1 i OUT2 są ustawione w stan wysokiej impedencji. Odwrócone Do tego pinu można zastosować odwrócony PWM(Gdy EN jest w stanie wysokim i PWM1 lub PWM2 w wysokim).Domyślnie w stanie niskim. |
| ENB | Gdy jest w stanie wysokim wyjścia OUT1 i OUT2 są ustawione w stan wysokiej impedencji. PWM może być stosowany do tego pinu(Gdy ENB jest w stanie niskim i PWM1 lub PWM2 w wysokim).Domyślnie w stanie wysokim. |
| PWM1 | Wejście sterujące dla OUT1. Domyślnie niski. |
| PWM2 | Wejście sterujące dla OUT2. Domyślnie niski. |
| OCM | Wyjście monitorujące prąd, pin zapewnia analogowe napiecie sprzężenia zwrotnego o wartości około 500 mV na każdy wzmacniacz. |
| DIAG | Wyjście diagnostyki błędów. przechodzi w stan niski gdy wystąpią błędy bądź sterownik jest wyłączony przez EN lub ENB. |
|
Tabela dla trybu PWM1 + PWM2 |
||||||
| Wejście | Wyjście | Tryb pracy | ||||
| EN | ENB | PWM1 | PWM2 | OUT1 | OUT2 | |
| 1 | 0 | PWM | 0 | PWM(H/L) | L |
Obroty do przodu/hamowanie przy prędkości określonej: PWM % |
| 1 | 0 | 0 | PWM | L | PWM(H/L) |
Obroty do tyłu/hamowanie przy prędkości określonej: PWM % |
| 1 | 0 | 0 | 0 | L | L | Stop, wyjścia podłączone do masy |
| 1 | 0 | 1 | 1 | L | L | |
| 0 | X | X | X | Z | Z | Swobodny bieg wyjścia odłączone |
| X | 1 | X | X | Z | Z | |
|
Tabela dla trybu PWM1 + PWM2 + EN |
||||||
| Wejście | Wyjście | Tryb pracy | ||||
| EN | ENB | PWM1 | PWM2 | OUT1 | OUT2 | |
| PWM | 0 | 1 | 0 | PWM(H/Z) | PWM(L/Z) |
Obroty do przodu/swobodny bieg przy prędkości określonej: PWM % |
| 0 | 1 | PWM(L/Z) | PWM(H/Z) |
Obroty do tyłu/swobodny bieg przy prędkości określonej: PWM % |
||
| 0 | X | X | X | Z | Z | Swobodny bieg wyjścia odłączone |
| X | 1 | X | X | Z | Z | |
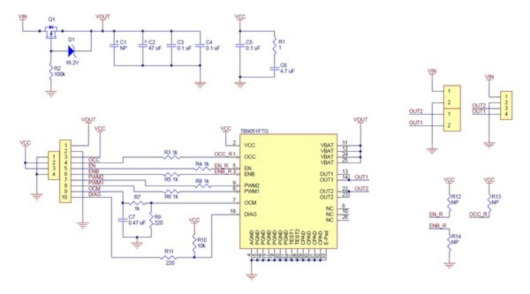
Układ zawiera sterownik oraz niezbędne elementy pasywne do jego poprawnej pracy. Schemat elektroniczny dostępny jest na rysunku poniżej.
Przydatne linki |
| Napięcie zasil. od | 4.5 V |
| Napięcie zasil. do | 28.0 V |
| Wydajność prąd | 2.5 A |
| Ilość kanałów | 1 |
| Szerokość opakowania | 8.5 cm |
| Wysokość opakowania | 0.6 cm |
| Głębokość opakowania | 11 cm |
| Masa opakowania | 0.007 kg |
Jako pierwszy zadaj pytanie dotyczące tego produktu!
Kraj pochodzenia: Stany Zjednoczone
Dane kontaktowe producenta: Pololu Corporation 920 Pilot Rd. Las Vegas, NV 89119 USA [email protected]
Dane kontaktowe wprowadzającego na rynek UE: BOTLAND B. DERKACZ SP. K. Gola 25A - 63-640 Bralin




