






































































































































































































































































































































































































Sterownik silnika krokowego zasilany napięciem z zakresu od 6 V do 35 V, przy maksymalnym poborze prądu 3 A na cewkę. Maksymalna rozdzielczość wynosi 1/128 kroku. Moduł pozwala na ciągły przepływ do 1,8 A prądu bez radiatora. Komunikuje się w sposób cyfrowy i magistralę SPI.
Układ umożliwia sterowanie silnikiem krokowym przy pomocy urządzenia pozwalającego generować stany logiczne, np. Arduino, STM32Discovoery, Raspberry Pi lub dowolnego mikrokontrolera. Moduł AMIS-30543 charakteryzuje się bardzo prostą obsługą.
Aby obrócić silnik o krok należy podać na wyprowadzenie NXT (STEP) stan wysoki (logiczną jedynkę), kolejna sekwencja zera i jedynki przesunie silnik o kolejny krok itd. Wybór kierunku odbywa się poprzez podanie odpowiedniego stanu na wyprowadzenie DIR (np. stan wysoki- obroty zgodnie ze wskazówkami zegara, stan niski - przeciwnie). Sterownik posiada również możliwość wyboru rozdzielczości pracy silnika oraz ograniczenia prądu maksymalnego. Te ustawienia realizowane są poprzez magistralę SPI.
Układ posiada otwory raster 2,54 mm do zamontowania złącz typu goldpin lub gniazd śrubowych. Złącza znajdują się w zestawie do samodzielnego wlutowania.
| Pin | Typ | Opis |
|---|---|---|
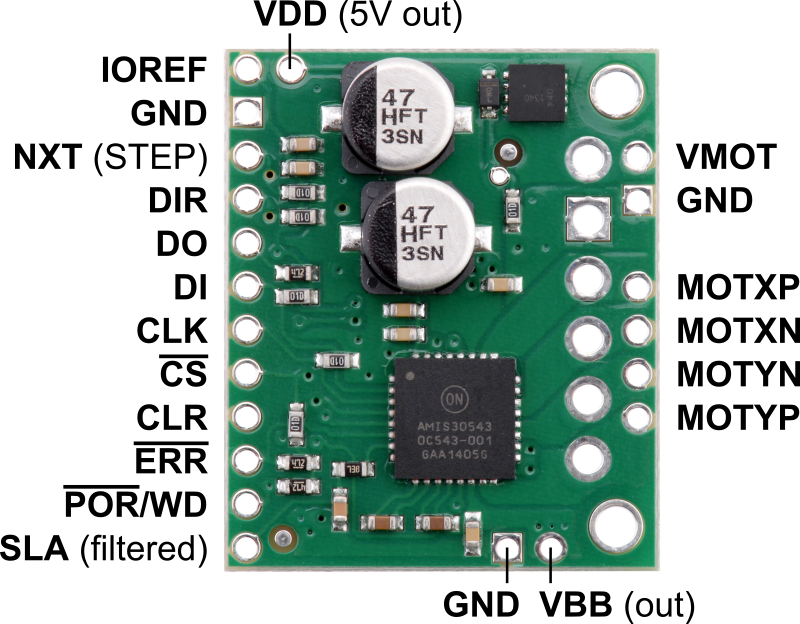
| VMOT | IN | Napięcie zasilania silnika od 6 do 30 V. Posiada ochronę przed odwrotną polaryzacją. |
| VBB | OUT | Wyjście napięcia zasilania silników za układem chroniącym przed odwrotną polaryzacją. |
| GND | Masa układu. | |
| MOTXP | OUT | Wyjście do podłączenia silnika: PLUS cewki X. |
| MOTXN | OUT | Wyjście do podłączenia silnika: MINUS cewki X. |
| MOTYP | OUT | Wyjście do podłączenia silnika: PLUS cewki Y. |
| MOTYN | OUT | Wyjście do podłączenia silnika: MINUS cewki Y. |
| VDD | OUT |
Wyjście regulatora napięcia 5 V. Może być używane do zasilania części logicznej poprzez sąsiadujący pin IOREF jeśli moduł będzie pracował z ukłądem 5 V. Wydajność prądowa jest zależna od napięcia wejściowego VMOT:
|
| IOREF | IN | Wszystkie piny wyjściowe z wyjątkiem SLA są podciągnięte do napięcia podanego na pin IOREF. Dlatego też to napięcie powinno być równe napięciu pracy ukłądu głównego, np. przy komunikacji z pracującym z 5 V Arduino Uno, na IOREF należy poddać również 5 V. |
| NXT | IN | Jeden impuls podany na pin STEP powoduje jeden krok silnika w kierunku wybranym poprzez podanie odpowiedniego stanu logicznego na pin DIR. Zbocze, na które reaguje sterownik można wybrać poprzez magistralę SPI, domyślnie jest to zbocze narastające. |
| DIR | IN | Wybór kierunku obrotów silnika poprzez stan niski i wyoski. Kierunek może być również regulowany poprzez magistralę SPI. |
| DO | OUT | Dane wyjściowe (MISO) w magistrali SPI. |
| DI | IN | Dane wejściowe (MOSI) magistrali SPI. |
| CLK | IN | Linia zegarowa magistrali SPI. |
| CS | IN | Wybór urządzenia (chip select) w trybie SPI. W celu obsługi modułu, należy podać stan niski. |
| CLR | IN | Reset układu. Podanie stanu wysokiego powoduje reset rejestrów wewnętrznych. |
| ERR | OUT | Wyjście sygnalizujące pojawienie się błędu poprzez wystąpienie stanu niskiego. Szczegóły błędu można odczytać poprzez magistralę SPI. |
| POR/WD | OUT | Wyprowadzenie generuje sygnał w stanie niskim, który może być wykorzystany jako reset dla innego układu. |
| SLA | OUT | Wyjście analogowe od 0 do 5V, którego sygnał jest proporcjonalny do poziomu napięcia back-EMF silnika. Posiada filtr dolnoprzepustowy. |
|
Uwaga! Podłączanie i odłączanie silnika, podczas gdy sterownik jest włączony może uszkodzić układ. |
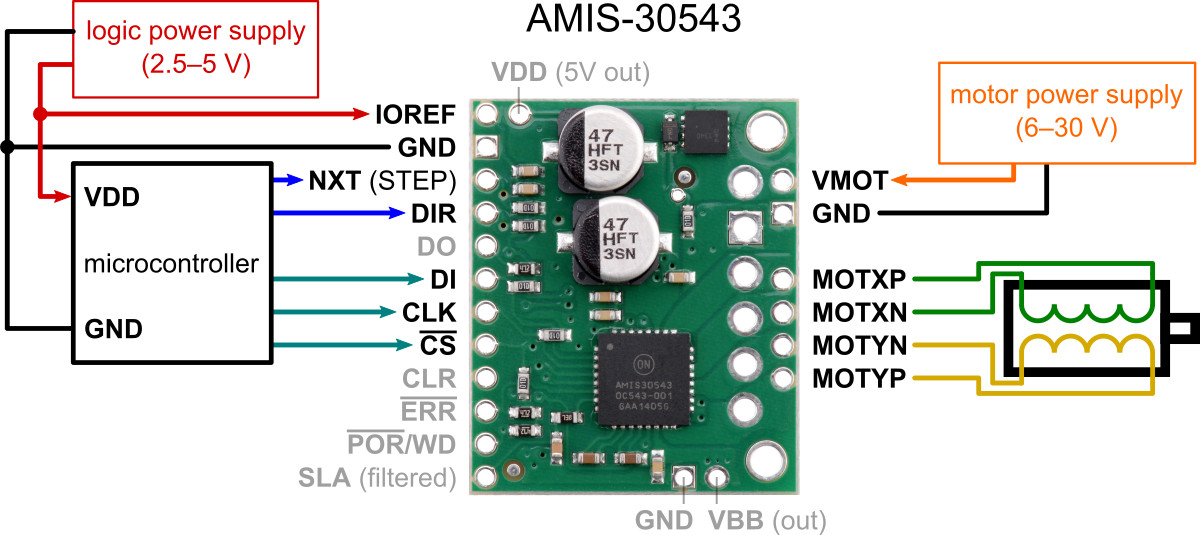
Do wyprowadzenia IOREF należy doprowadzić napięcie z jakim będą pracowały cyfrowe wyjścia i wejścia. Aby obrócić silnik o krok należy podać na wyprowadzenie NEXT stan wysoki (logiczną jedynkę), kolejna sekwencja zera i jedynki przesunie silnik o kolejny krok itd. Wybór kierunku odbywa się poprzez podanie odpowiedniego stanu na wyprowadzenie DIR (np. stan wysoki- obroty zgodnie ze wskazówkami zegara, stan niski - przeciwnie). Pozostałe funkcje, takie jak prąd maksymalny czy rozdzielczość ustawiane są przy pomocy magistrali SPI.

W tym wypadku wyprowadzeni IOREF można podłączyć z sąsiadującym pinem VDD. Dalsza cześć jest analogiczna do poprzedniego punktu.
|
Produkt kompatybilny z Arduino Producent przygotował bibliotekę dla użytkowników Arduino. |
Płytka została zaprojektowana tak, aby mogła odprowadzić ciepło przy ciągłym poborze prądu około 1,8 A na cewkę. Jeśli prąd będzie znacznie wyższy należy zastosować zewnętrzny radiator, do którego montażu można użyć kleju termoprzewodzącego.
Przydatne linki |
| Szerokość opakowania | 8 cm |
| Wysokość opakowania | 10.5 cm |
| Głębokość opakowania | 1 cm |
| Masa opakowania | 0.009 kg |
Jako pierwszy zadaj pytanie dotyczące tego produktu!
Kraj pochodzenia: Stany Zjednoczone
Dane kontaktowe producenta: Pololu Corporation 920 Pilot Rd. Las Vegas, NV 89119 USA [email protected]
Dane kontaktowe wprowadzającego na rynek UE: BOTLAND B. DERKACZ SP. K. Gola 25A - 63-640 Bralin




















