
















































































































































































































































































- Produkt wycofany
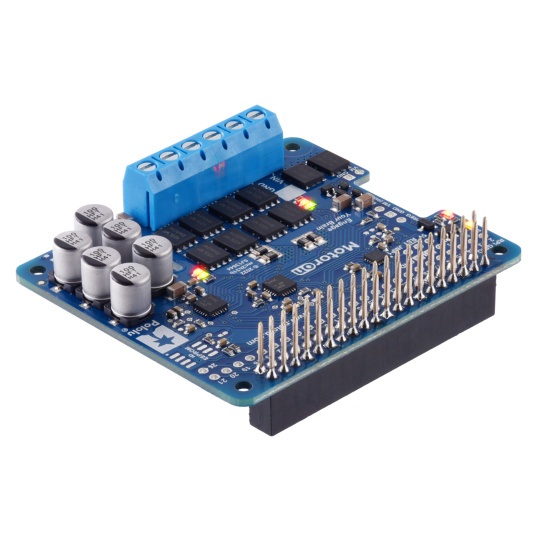
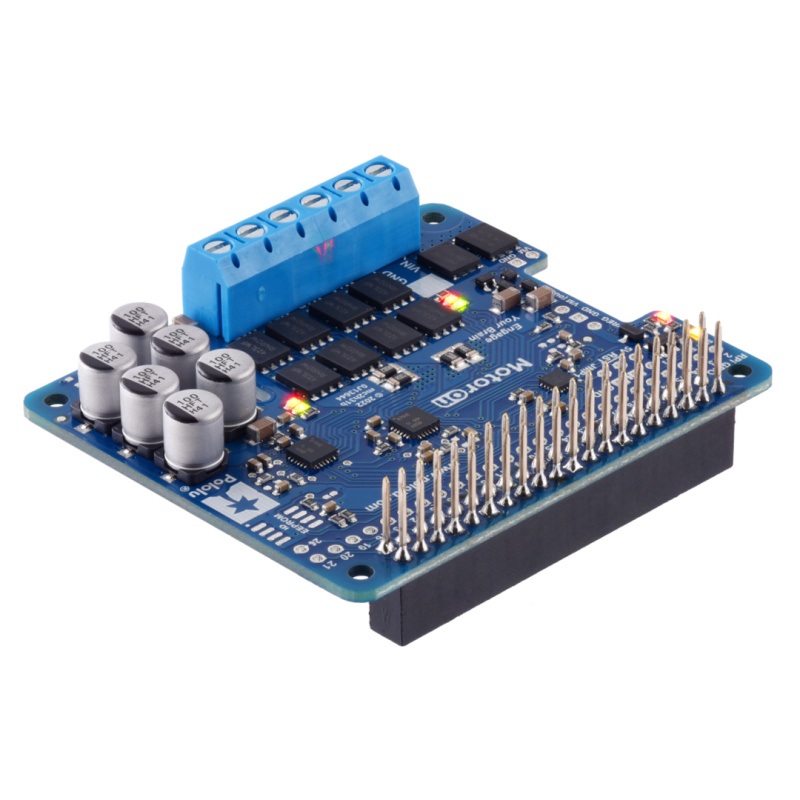












Dwukanałowy sterownik silników Motoron M2H18v18 zaprojektowany przez firmę Pololu w postaci nakładki do minikomputerów Raspberry Pi. Moduł posiada 40-pinowe złącze, do którego można podłączyć inne nakładki Raspberry Pi. Produkt komunikuje się z minikomputer przy pomocy interfejsu I2C, dzięki czemu do rozpoczęcia pracy potrzebne są tylko dwa piny GPIO. Nakładka pozwala na sterownie dwoma silnikami o napięciu zasilania od 6,5 V do 30 V i natężeniu prądu do 18 A.
Produkt kompatybilny z Raspberry Pi!
Przed rozpoczęciem pracy sprawdź także przewodnik użytkownika przygotowany przez producenta.
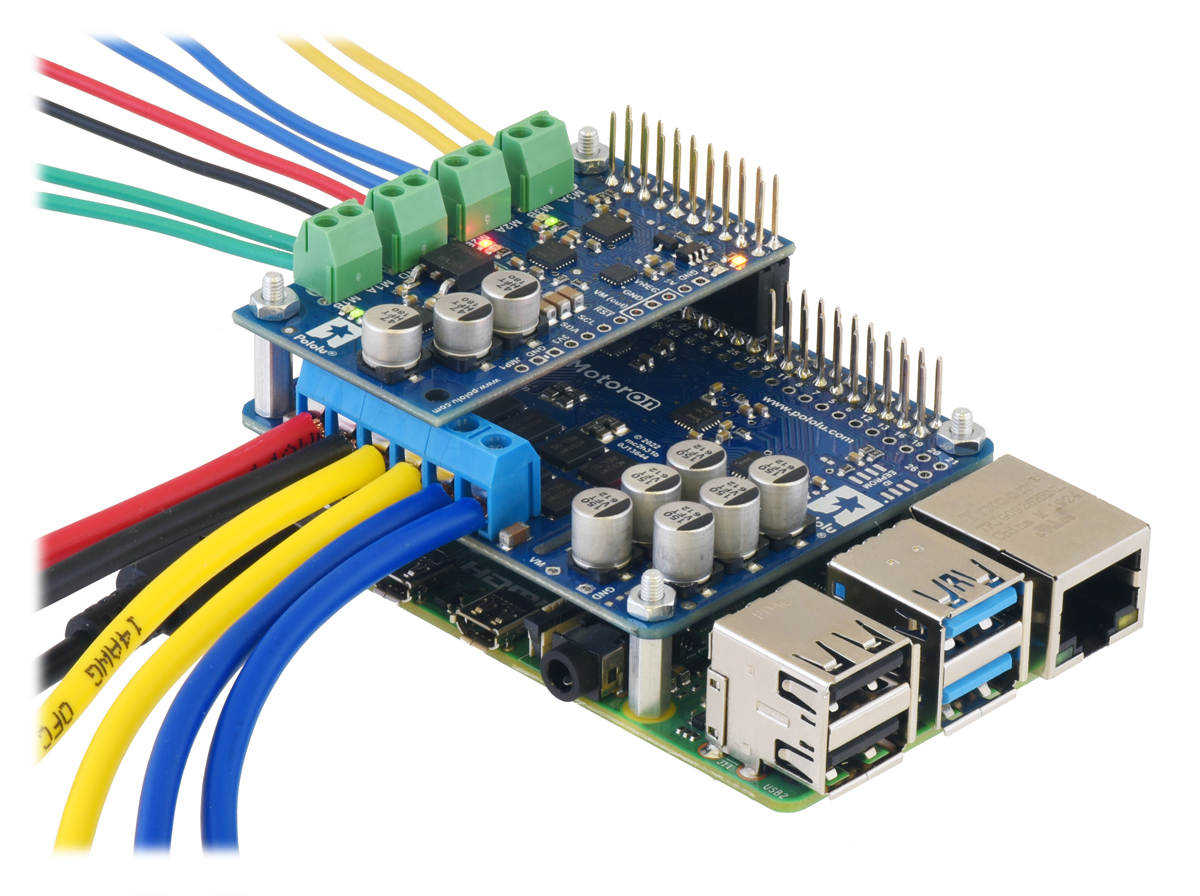
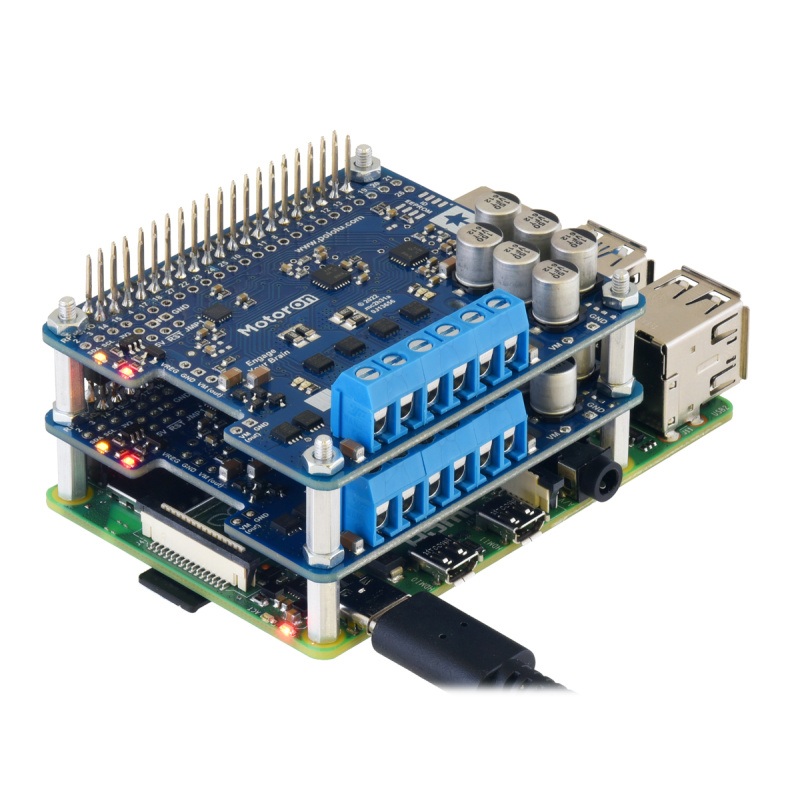
Motoron M2H18v18 dwukanałowy sterownik silników - 30 V / 18 A - nakładka do Raspberry Pi - zmontowana - Pololu 5048 - przykład połączenia z Raspberry Pi oraz dodatkową nakładką Motoron.
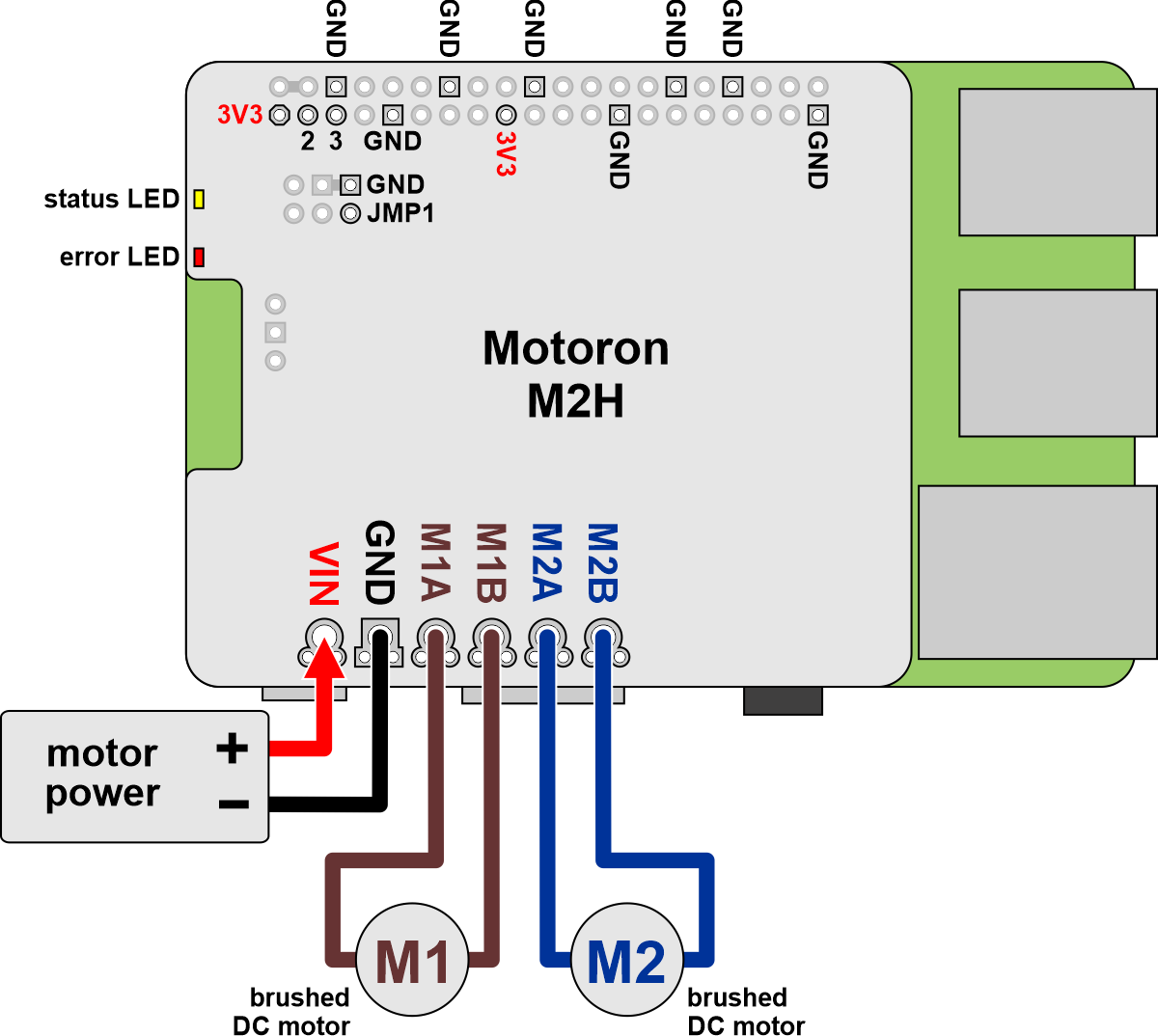
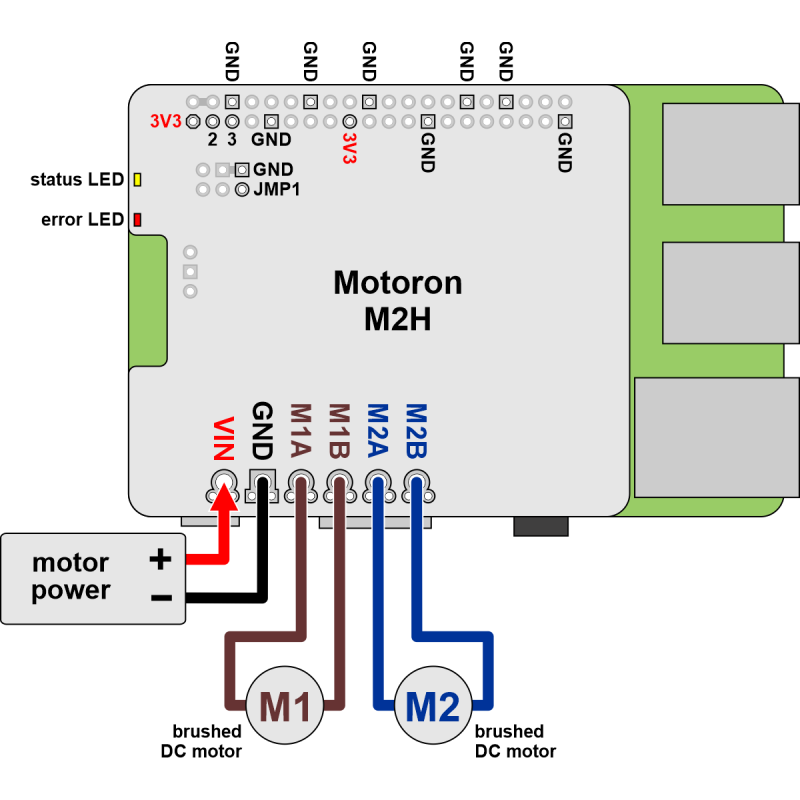
Jak połączyć sterownik z silnikiem? - Schemat połączenia sterownika Motoron.
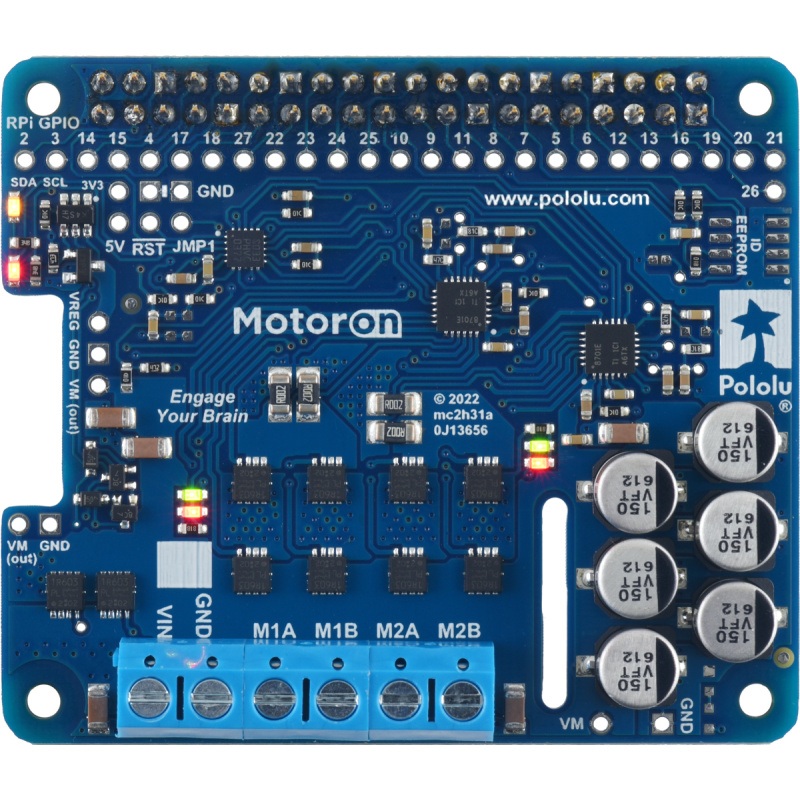
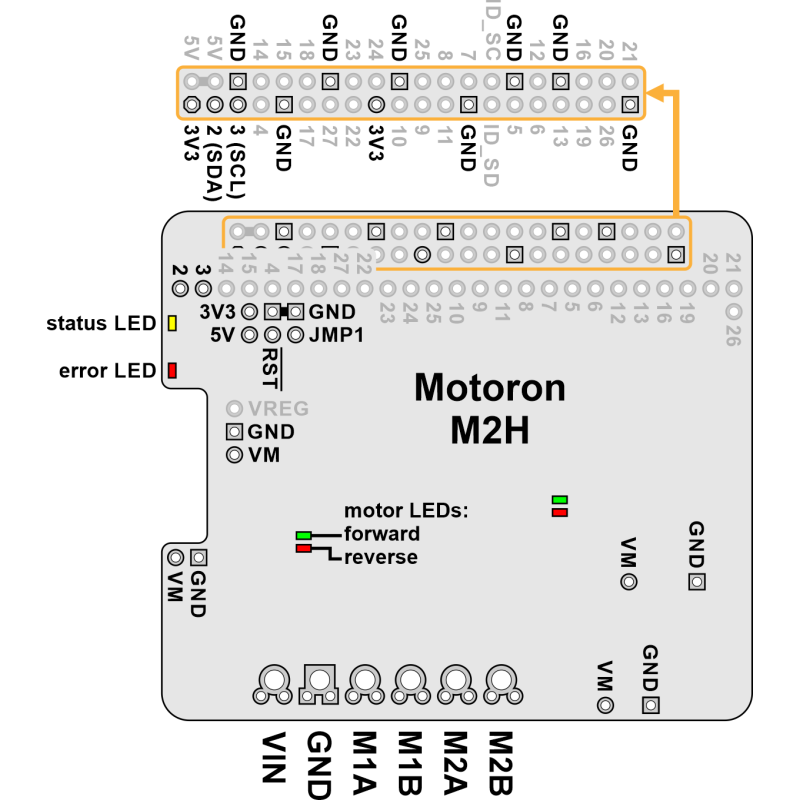
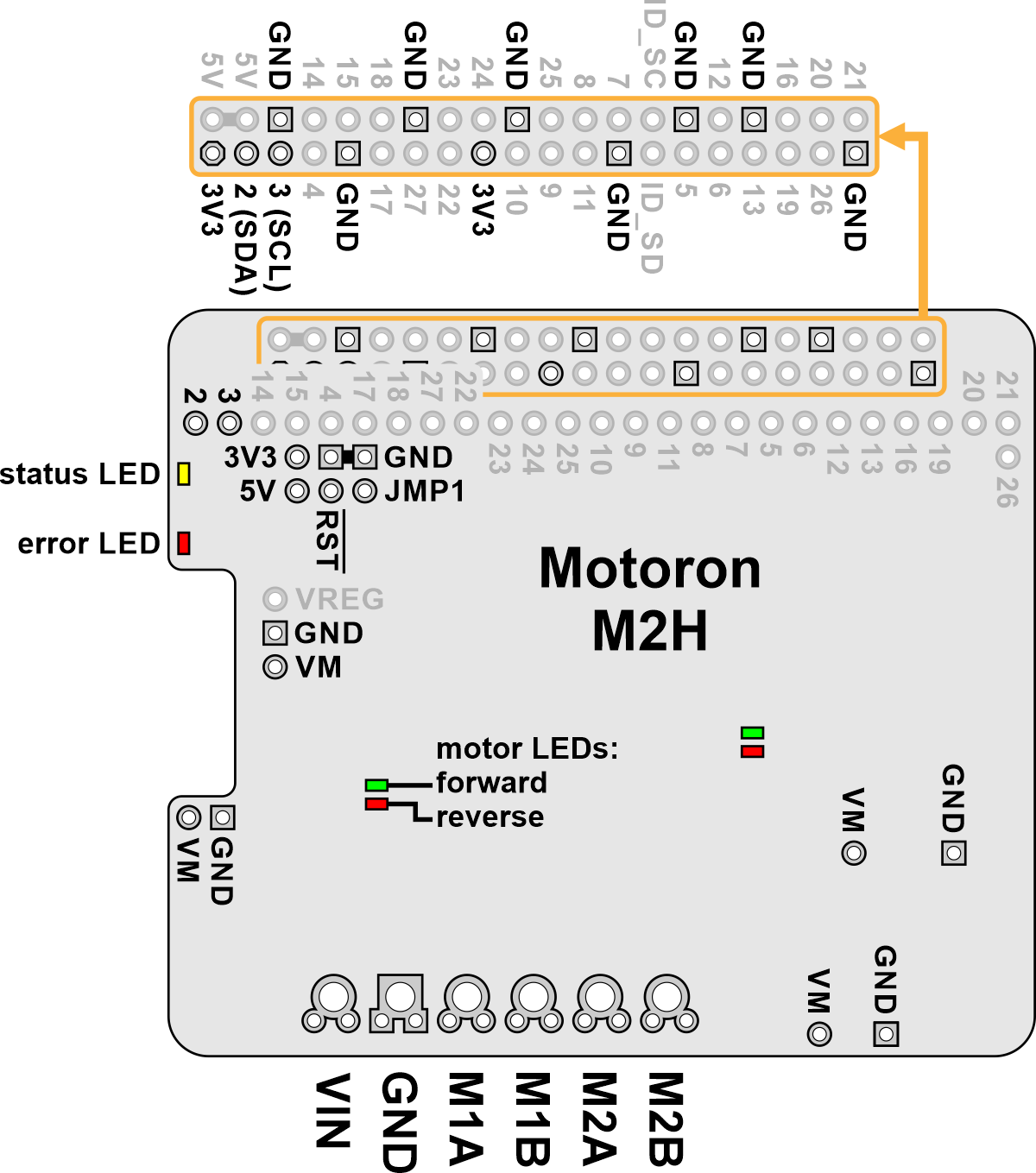 Rozmieszczenie wyprowadzeń sterownika Motoron.
Rozmieszczenie wyprowadzeń sterownika Motoron.
| Napięcie zasil. od | 6.5 V |
| Napięcie zasil. do | 30.0 V |
| Wydajność prąd | 18.0 A |
| Ilość kanałów | 2 |
Jako pierwszy zadaj pytanie dotyczące tego produktu!
Kraj pochodzenia: Stany Zjednoczone
Dane kontaktowe producenta: Pololu Corporation 920 Pilot Rd. Las Vegas, NV 89119 USA [email protected]
Dane kontaktowe wprowadzającego na rynek UE: BOTLAND B. DERKACZ SP. K. Gola 25A - 63-640 Bralin