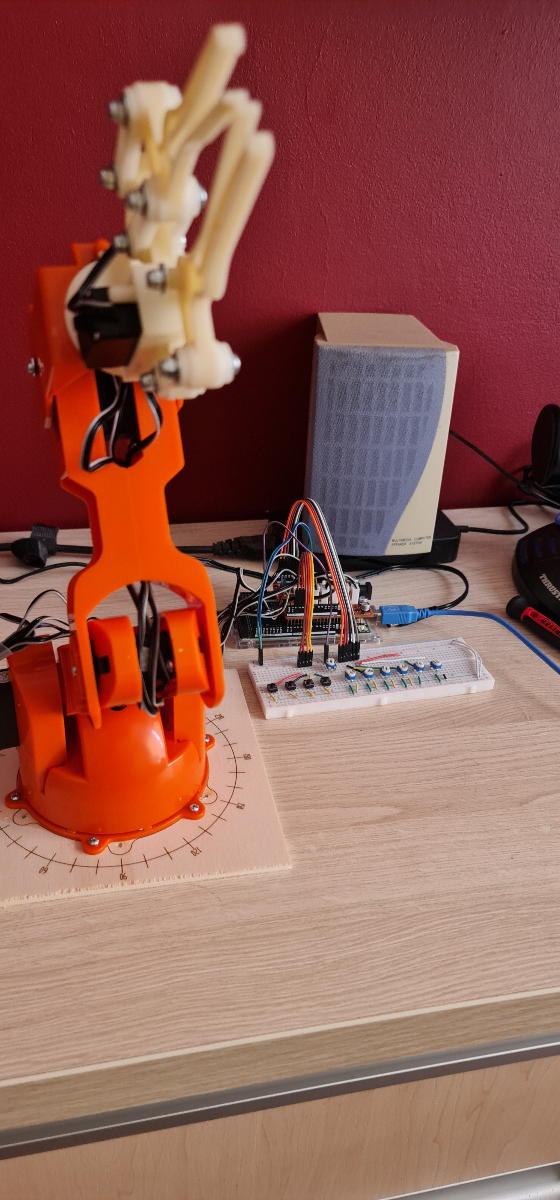










































































































































































































































































































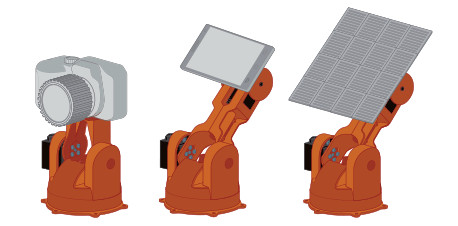
Ramię robota do samodzielnego montażu wyposażone w 6 serwomechanizmów. W zestawie znajduje się również dedykowany kontroler Braccio w postaci nakładki na Arduino oraz niezbędne elementy montażowe. Urządzenie zasilane jest napięciem 5 V, pobiera prąd do 5 A.
Ramię robota do samodzielnego montażu wyposażone w 6 serwomechanizmów. W zestawie znajduje się również dedykowany kontroler Braccio w postaci nakładki na Arduino oraz niezbędne elementy montażowe. Urządzenie zasilane jest napięciem 5 V, pobiera prąd do 5 A (w zestawie znajduje się zasilacz).
Po złożeniu ramienia, w celu sprawdzenia poprawności działania, wystarczy uruchomić przykładowy program testBraccio90 bezpośrednio ze środowiska Arduino IDE, w sekcji Braccio examples.
W zestawie znajduje się sterownik w postaci nakładki do Arduino, tzw. Braccio Arduino Shield. Urządzenie może kontrolować 6 silników / serwomechanizmów o poborze prądu do 1,1 A dla gniazd M1 - M4 oraz 0,75 A dla gniazd M5 i M6. Nakładka jest kompatybilna z płytkami:

Sterownik ramienia, nakładka na Arduino - Braccio Shield.
|
Wyprowadzenie Braccio |
Wyprowadzenie Arduino |
Wyprowadzenie Braccio |
Wyprowadzenie Arduino |
|
|---|---|---|---|---|
| M1 | 11 | I1 | A1 (15) | |
| M2 | 10 | I2 | A2 (16) | |
| M3 | 9 | I3 | A3 (17) | |
| M4 | 6 | I4 | A4 (18) | |
| M5 | 5 | I5 | A5 (19) | |
| M6 | 3 | I2C (TWI) | SDA, SCL | |
| I0 | A0 (14) | SERIAL | RX0, TX0 |
Sposób montażu urządzenia można znaleźć w przewodniku użytkownika oraz zamieszczonym poniżej filmie.
Przydatne linki
|
| Promocja | 1 |
| Szerokość opakowania | 21.8 cm |
| Wysokość opakowania | 10.2 cm |
| Głębokość opakowania | 37.7 cm |
| Masa opakowania | 1.703 kg |
Jako pierwszy zadaj pytanie dotyczące tego produktu!
| Model |
Mikro kontroler |
Piny |
Pamięć Flash RAM EEPROM |
Zasilanie |
Interfejs |
|---|---|---|---|---|---|
|
|
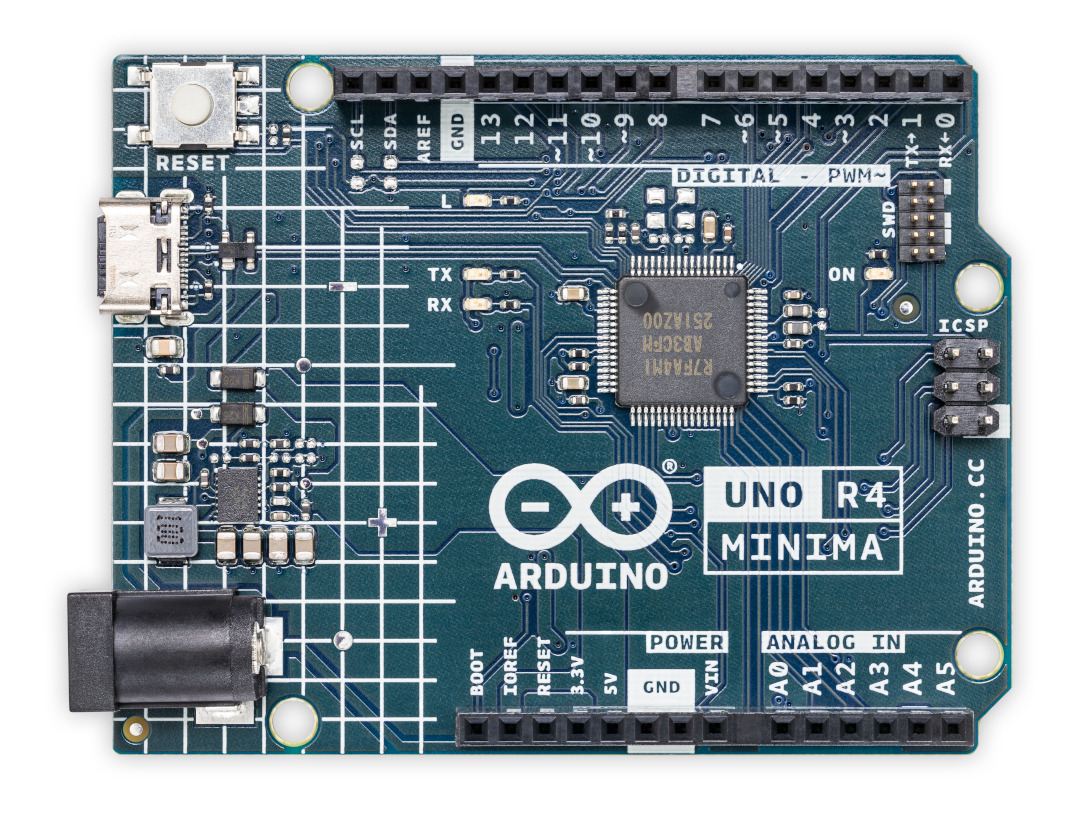
Renesas RA4M1 48 MHz |
14 I/O 6 PWM 6 analog |
256 kB 32 kB - |
DC: 6-24V USB: 5V |
UART I2C SPI CAN DAC |
|
|
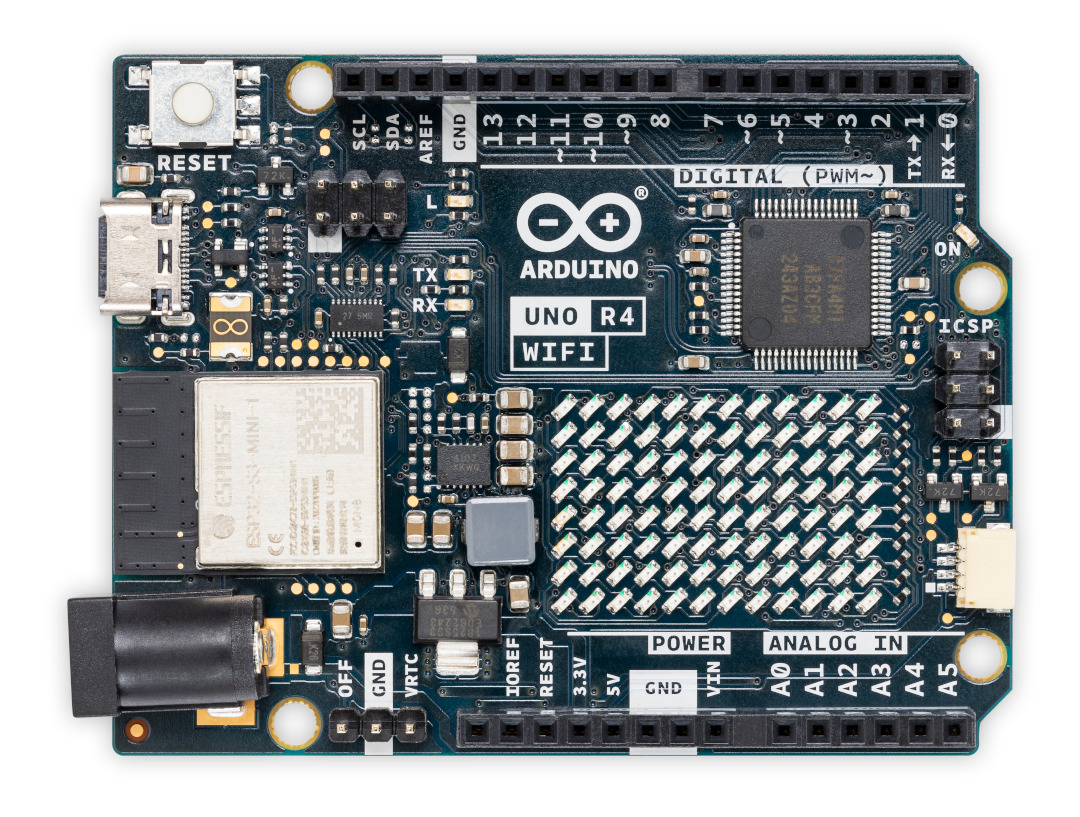
Renesas / ESP RA4M1 / 32-S3-Mini 48 MHz / 240 Mhz |
14 I/O 6 PWM 6 analog |
256 kB 32 kB - |
DC: 6-24V USB: 5V |
UART I2C SPI CAN DAC |
|
|
ATmega 328 16 MHz |
14 I/O 6 PWM 6 analog |
32 kB 2 kB 1 kB |
DC: 7-12V USB: 5V |
UART I2C SPI |
|
|
ATmega 4809 20 MHz |
14 I/O 5 PWM 6 analog |
48 kB 6 kB 256 B |
DC: 5-12V USB: 5V |
UART I2C SPI |
|
|
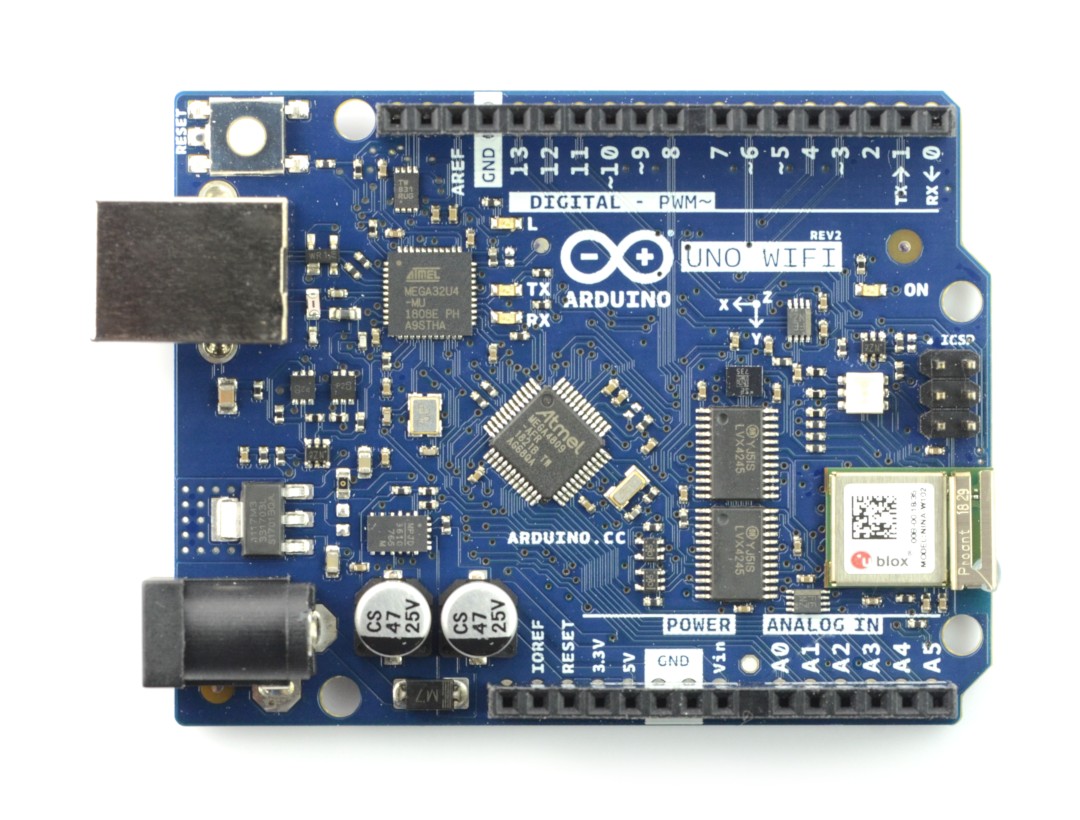
ATmega 32u4 16 MHz |
20 I/O 7 PWM 12 analog |
32 kB 2,5 kB 1 kB |
DC: 7-12V USB: 5V |
UART I2C SPI USB |
| Mega 2560
|
ATmega 2560 16 MHz |
54 I/O 16 analog |
256 kB 8 kB 4 kB |
DC: 7-12V |
UART I2C SPI |
|
|
AT91SAM 3X8E 84 MHz |
54 I/O 12 analog |
512 kB 96 kB - |
DC: 7-12V USB: 5V |
UART I2C SPI USB CAN |
|
|
STM 32H747XI 480 MHz + 240 MHz |
75 I/O 12 PWM 12 analog |
2 MB 1 MB - |
DC: 6-24V USB: 5V |
UART I2C SPI CAN |
|
|
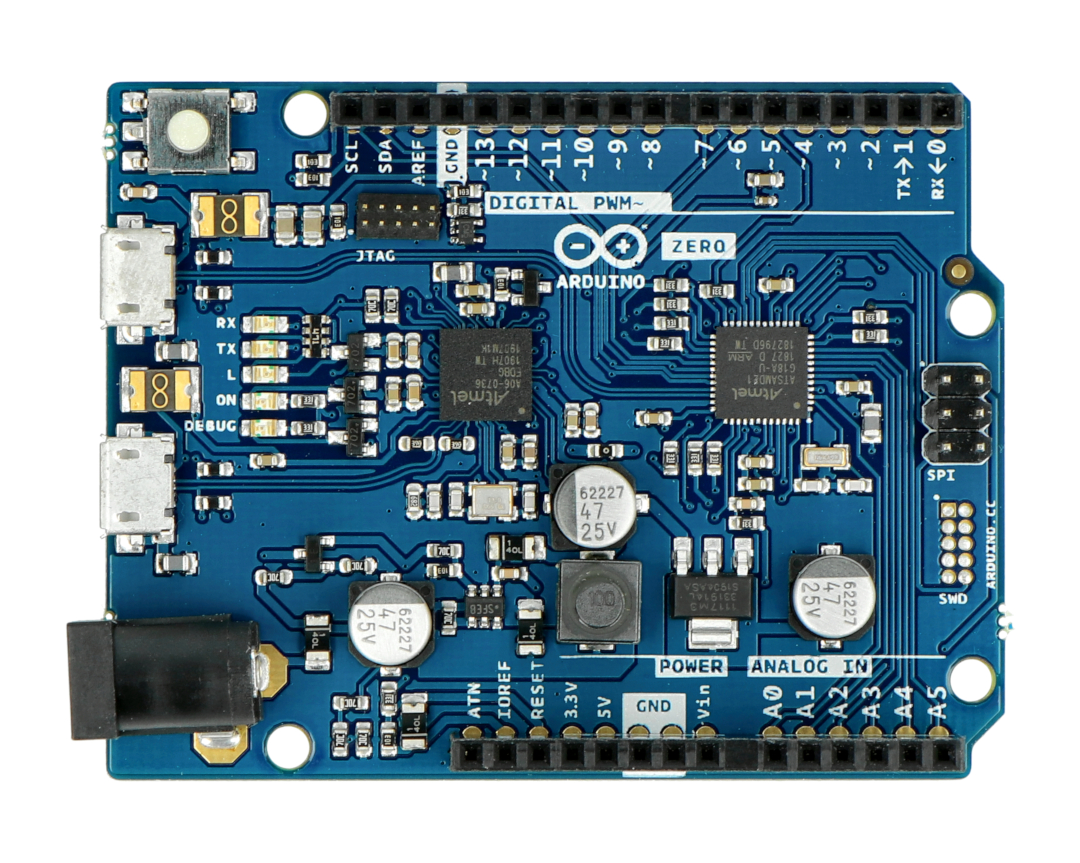
ARM ATSAMD21G18 48 MHz |
20 I/O 10 PWM 6 analog |
256 kB 32 kB - |
DC: 7-12V USB: 5V |
UART I2C SPI |
|
|
ATmega 32u4 16 MHz |
20 I/O 12 analog |
32 kB 2,5 kB 1 kB |
DC: 7-12V USB: 5V |
UART I2C SPI |
|
|
ATmega 328 16 MHz |
22 I/O 8 analog |
32 kB 2 kB 1 kB |
DC: 7-12V USB: 5V |
UART I2C SPI |
|
|
ATmega 328 16 MHz |
14 I/O
6 PWM 6 analog |
32 kB 2 kB 1 kB |
DC: 7-12V USB: 5V |
UART I2C SPI |