- Produkt wycofany








|
Uwaga! Sprzedaż produktu została zakończona. Sprawdź inne w tej kategorii. |
Astorino to zaawansowany robot edukacyjny polskiej produkcji, który został stworzony w celu zapewnienia odpowiedniego narzędzia do nauki programowania i symulacji procesów przemysłowych dla uczniów szkół średnich w zawodzie technik robotyk i studentów uczelni technicznych dla kierunków takich jak automatyka, robotyka czy mechatronika. Ramię robota jest 6-osiowe, co oznacza, że posiada szeroki zakres ruchowy, a jego korpus został wykonany z filamentu PETG przy pomocy technologii druku 3D, co umożliwia łatwą naprawę w razie awarii. Astorino jest wyposażony w złożony system sterowania, oprogramowanie służące do wizualizacji pracy robota z edytorem kodu i moduł do obsługi chwytaka dwuszczękowego. Posiada również akcelerometr wykrywający kolizje oraz przycisk awaryjny E-STOP, zapewniający bezpieczeństwo podczas użytkowania. W zestawie znajduje się komplet podręczników do obsługi robota, a oprócz tego w serwisie YouTube dostępny jest bezpłatny kurs dla początkujących, który zdecydowanie ułatwi rozpoczęcie nauki.
 Robot edukacyjny Kawasaki Robotics Astorino - 6-osiowy - ramię robota do nauki programowania - Astor Astorino-BASIC-B002.
Robot edukacyjny Kawasaki Robotics Astorino - 6-osiowy - ramię robota do nauki programowania - Astor Astorino-BASIC-B002.
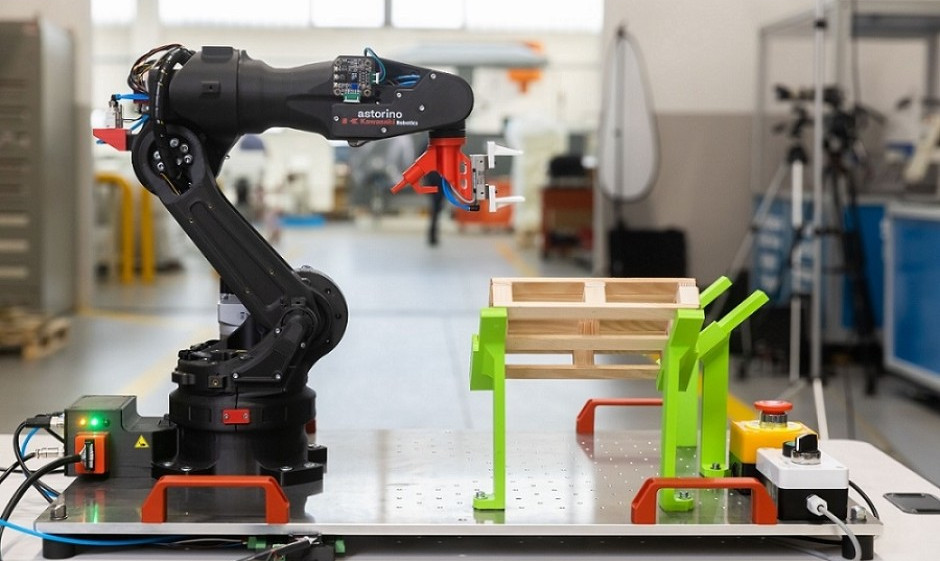 Ramię robota służy do edukacji uczniów technicznych szkół ponadpodstawowych i studentów kierunków automatyka, robotyka czy mechatronika.
Ramię robota służy do edukacji uczniów technicznych szkół ponadpodstawowych i studentów kierunków automatyka, robotyka czy mechatronika.
Robot edukacyjny Astorino dysponuje 6 stopniami swobody, co zapewnia mu realizację ruchów w trzech wymiarach przestrzennych X, Y i Z, umożliwiając przesunięcie wzdłuż osi i rotację wokół nich. Może naśladować złożone ruchy charakterystyczne dla przemysłowych ramion robotycznych, obejmujące dokładne pozycjonowanie, śledzenie trajektorii oraz manipulację obiektami.
Pełna dokumentacja techniczna robota jest dostępna w specjalnej zakładce na stronie producenta.
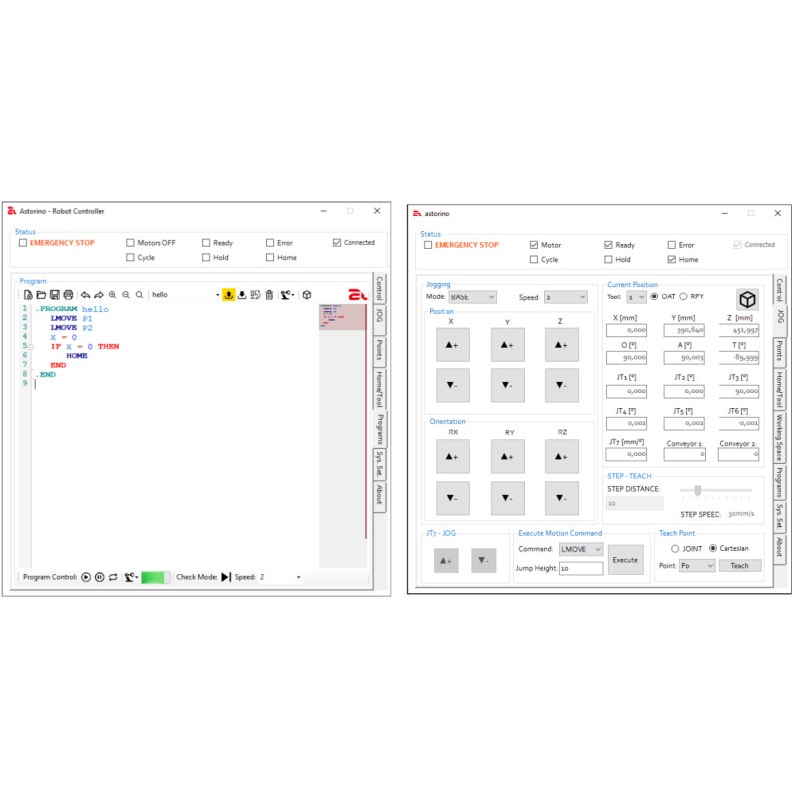
 Odpowiednie ruchy można zaprogramować za pomocą kompatybilnego oprogramowania.
Odpowiednie ruchy można zaprogramować za pomocą kompatybilnego oprogramowania.
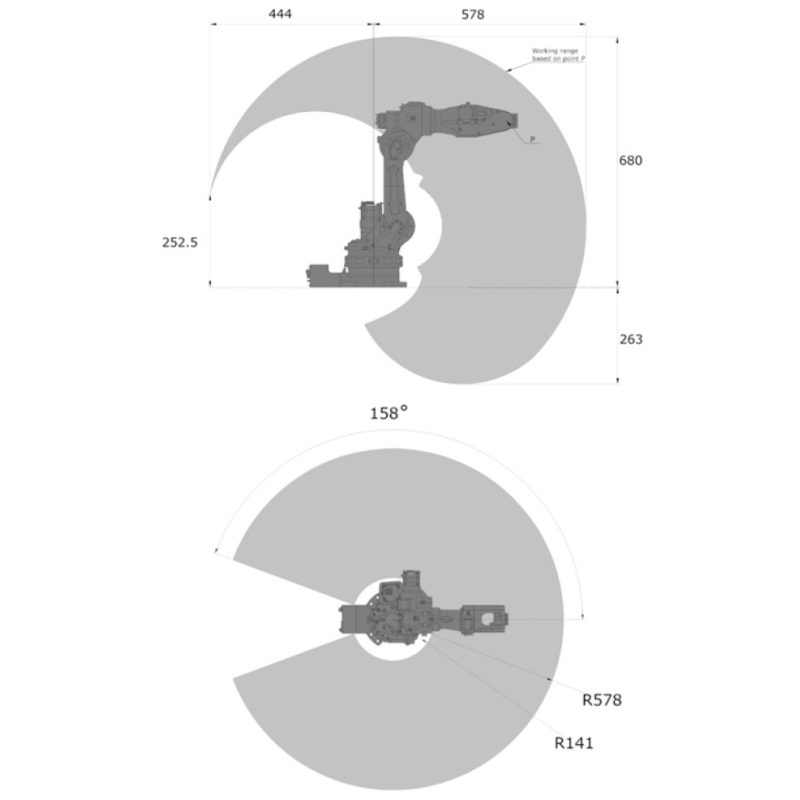
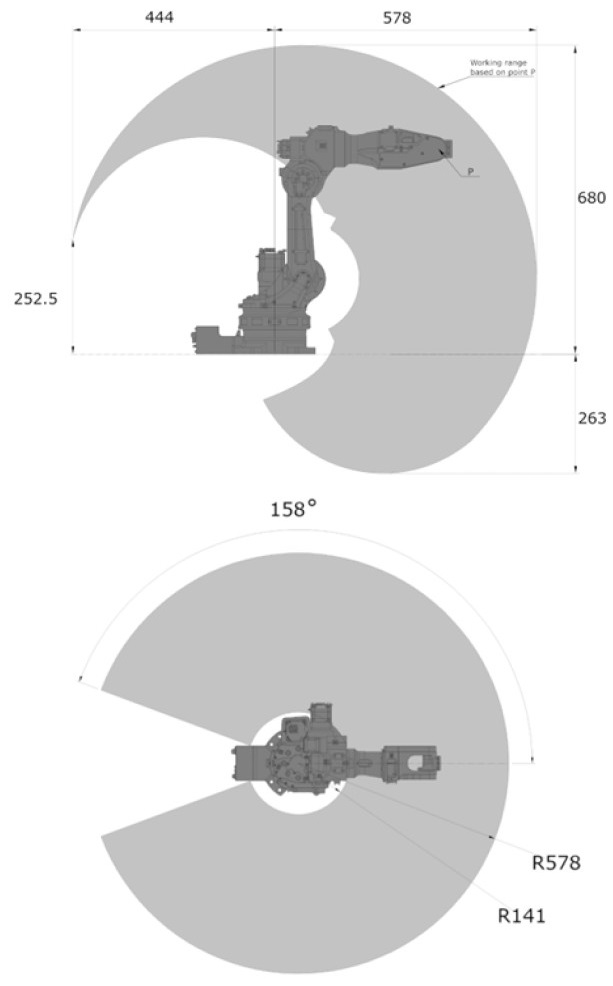 Zasięg ruchu ramienia robota.
Zasięg ruchu ramienia robota.
Astorino jest napędzane przez silniki krokowe, które umożliwiają bardzo dokładne sterowanie pozycją, prędkością oraz kątem obrotu ramienia robota. Charakteryzują się one także niezawodnością i długą żywotnością. Użycie tych silników umożliwia również programistom i uczniom rozwijanie umiejętności w zakresie projektowania algorytmów sterujących.
Ramię robota zostało skonstruowane przy wykorzystaniu technologii druku 3D, co umożliwia samodzielny wydruk potrzebnych komponentów i znacznie ułatwia naprawę oraz wymianę uszkodzonych części. Elementy robota są produkowane z użyciem filamentu PETG, co zapewnia odpowiednią trwałość i wytrzymałość poszczególnym podzespołom.
W naszej ofercie można znaleźć drukarki 3D oraz filamenty PETG potrzebne od wydrukowania części.
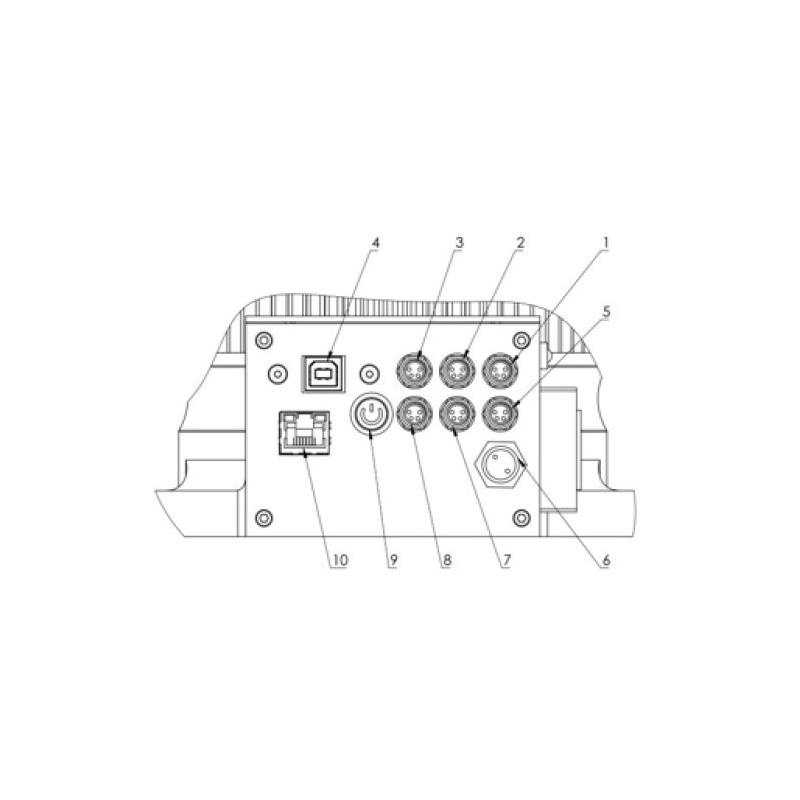
1. Port ESTOP do podłączenia przycisku awaryjnego zatrzymania; M8 4-pinowy
2. Złącze dla enkodera nr 1 - opcja rozwijana; M8 4-pinowe
3. Złącze dla enkodera nr 2 - opcja rozwijana; M8 4-pinowe
4. Port USB typu B
5. Złącze dla kamery przemysłowej - opcja rozwijana; M8 4-pinowe
6. Złącze zasilania
7. Port Teach Pendant (aktualnie w przygotowaniu)
8. Złącze NC (No Connection)
9. Włącznik główny
10. Port Ethernet RJ45
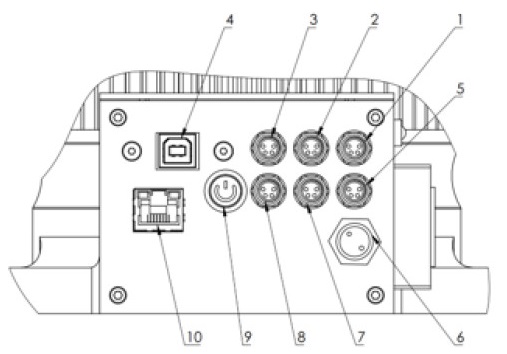 Dostępne opcje połączeń robota.
Dostępne opcje połączeń robota.
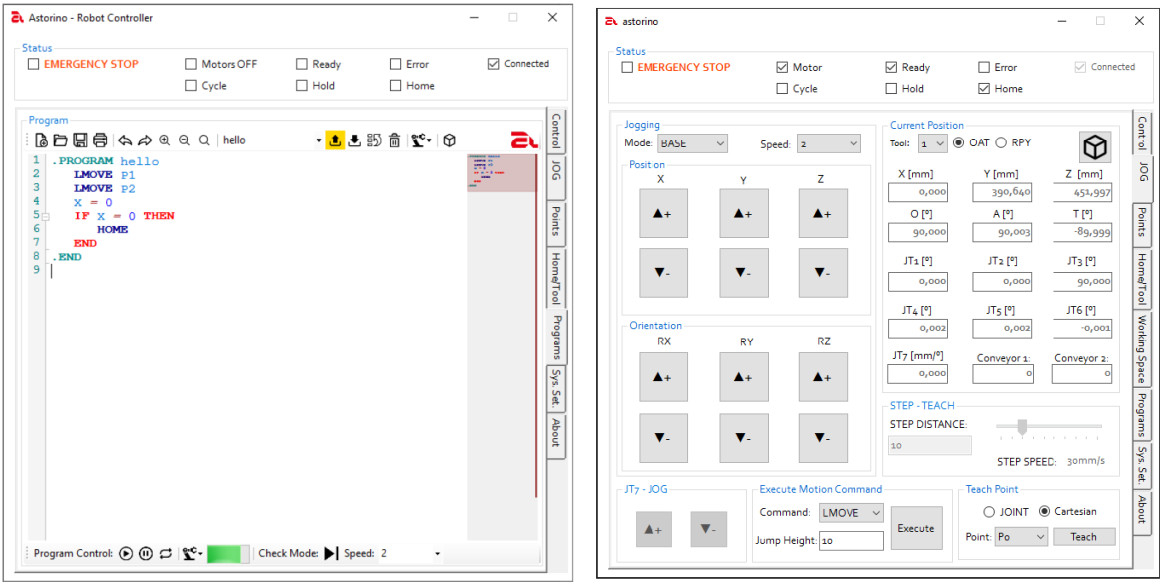 Oprogramowanie Astorino.
Oprogramowanie Astorino.
Niewątpliwą zaletą tego projektu jest swobodny dostęp do kursu dla początkujących na platformie YouTube, który stanowi cenne źródło wiedzy dla użytkowników tego urządzenia. Poradniki obejmują podstawowy zakres tematyczny, dotyczący ogólnej wiedzy o sprzęcie i jego obsłudze. Kurs stanowi znakomite uzupełnienie dla uczniów, umożliwiając im rozpoczęcie przygody z nauką obsługi robota.
Sprawdź już teraz kurs dla początkujących, który jest dostępny całkowicie online.
| Specyfikacja techniczna | |||
|---|---|---|---|
| Typ | Ramię robota | ||
| Liczba osi | 6 | ||
| Udźwig | 1 kg | ||
| Maks. zasięg | 578 mm | ||
| Powtarzalność | ± 0,2 mm | ||
| Zakres ruchów | JT1 | ± 158° | |
| JT2 | od -90° do 127° | ||
| JT3 | od 0° do 168° | ||
| JT4 | ± 240° | ||
| JT5 | ± 120° | ||
| JT6 | ± 360° | ||
| Maks. prędkość ruchu | JT1 | 38°/s | |
| JT2 | 26°/s | ||
| JT3 | 26°/s | ||
| JT4 | 67,5°/s | ||
| JT5 | 67,5°/s | ||
| JT6 | 128,5°/s | ||
| Allowable Moment | JT4 | 6,2 Nm | |
| JT5 | 1,45 Nm | ||
| JT6 | 1,1 Nm | ||
| Kontroler | Teensy 4.1 | ||
| Komunikacja | MODBUS TCP, TCP/IP, UDP, Serial | ||
| Wejścia/wyjścia | 8/8 (PNP 8 mA, NPN 15 mA); 2/2 (24 V PNP na JT3) |
||
| Zasilanie | od 100 V do 240 V, 50/60 Hz | ||
| Maks. pobór prądu | 144 W | ||
| Wykrywanie kolizji | Wbudowany akcelerometr | ||
| Pozycja instalacji | Podłoże | ||
| Temperatura pracy | od 0°C do 40°C | ||
| Wilgotność pracy | od 35% do 80% | ||
| Kolor | Czarny | ||
| Materiał | PET-G | ||
| Masa | 12 kg | ||
| Opcje rozbudowy | |||
|---|---|---|---|
| Moduł I/O | 8x wejście/wyjście dla 24 V | ||
| 7 oś | Tor jezdny ramienia robota | ||
| System wizyjny | OpenMV | ||
| Śledzenie taśmy | Maksymalnie 2 enkodery | ||
| Dodatkowe wejścia | 4x wejście dla 24 V dla obsługi sygnałów w czasie rzeczywistym | ||
| Komunikacja szeregowa | UART dla 3,3 V | ||
Przydatne linki |
| Szerokość opakowania | 58 cm |
| Wysokość opakowania | 40 cm |
| Głębokość opakowania | 38 cm |
| Masa opakowania | 14.5 kg |
Jako pierwszy zadaj pytanie dotyczące tego produktu!