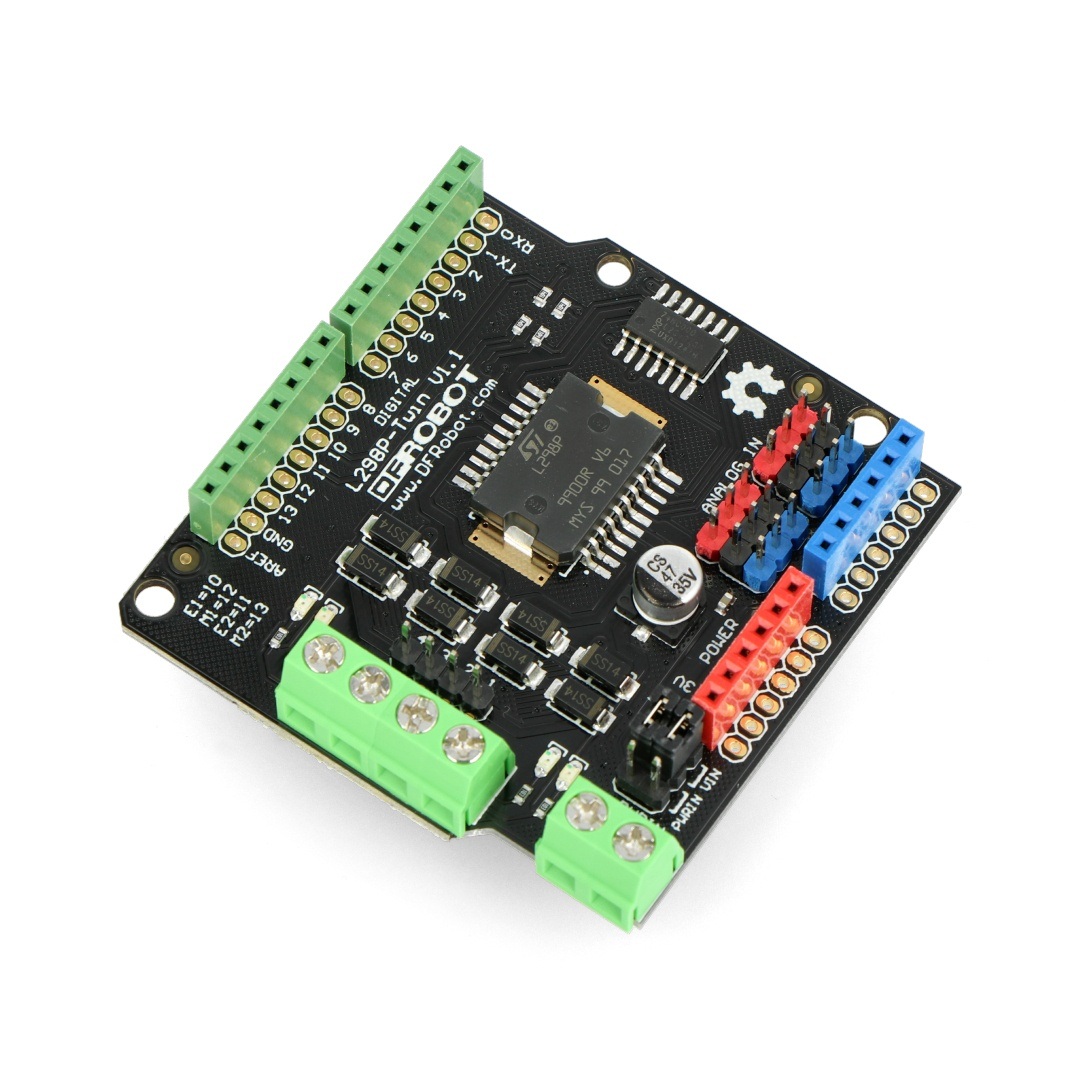



























































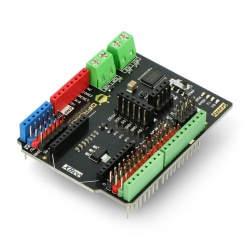












































































































































































































































Nakładka do Arduino wyprodukowana przez DFRobot, która umożliwia sterowanie dwoma silnikami prądu stałego 35 V / 2 A. Wyposażona w układ L298P pozwalający na regulację kierunku i prędkości podłączony silników. Nakładka dostarcza prąd wyjściowy do 2 A na każdy kanał. Wykorzystuje tylko cztery wyprowadzenia Arduino, może być zasilany zarówno z płytki bazowej jak i zewnętrznego źródła, jednak producent zdecydowanie zaleca stosowanie zewnętrznego zasilacza.
Uwaga! Nakładka nie jest kompatybilna z I/O Expansion Shield V7.1 od DFRobot.
Produkt kompatybilny z Arduino
Na stronie producenta dostępny jest szczegółowy przewodnik użytkownika, który znacząco ułatwia rozpoczęcie pracy z modułem. Zawiera między innymi instrukcję połączenia oraz przykładowy kod programu.
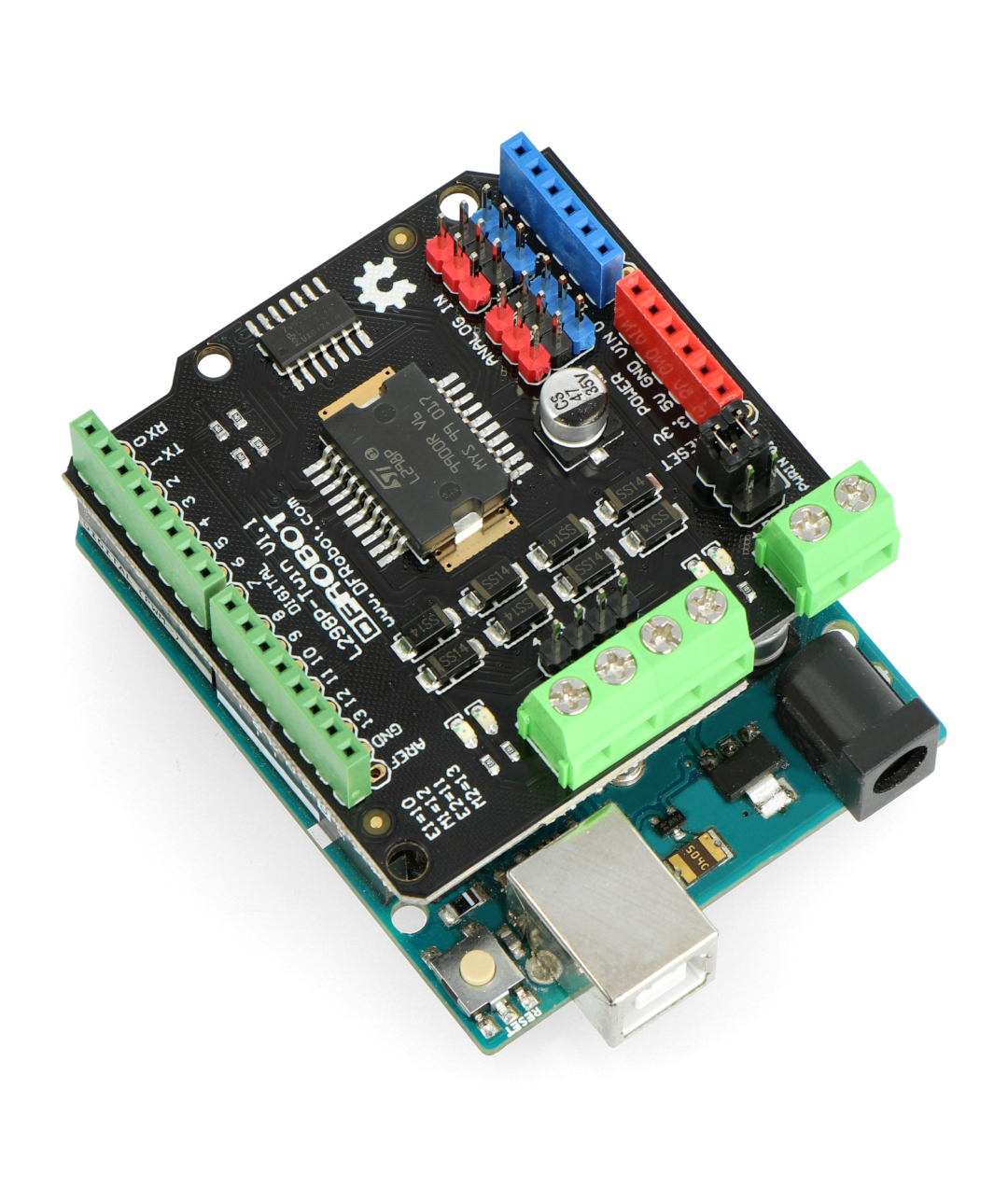
Połączenie nakładki z Arduino. Płytka Arduino nie jest częścią zestawu, można ją nabyć osobno w naszym sklepie.
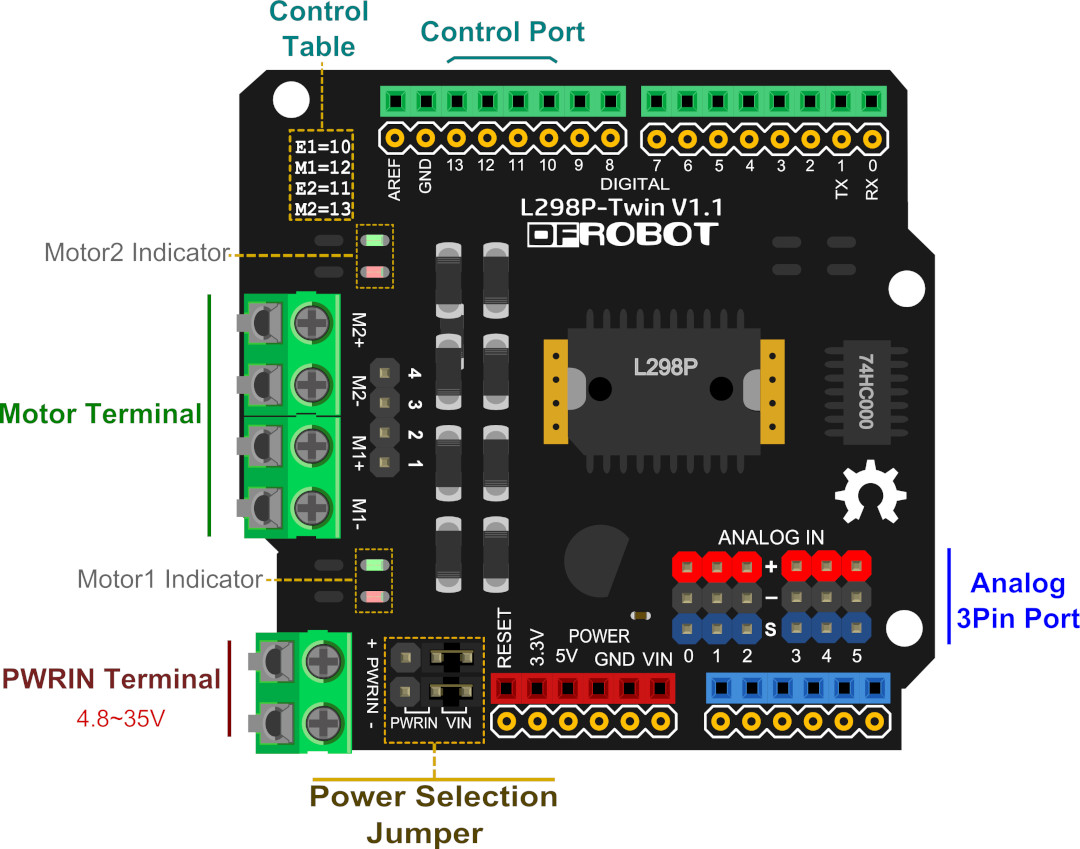
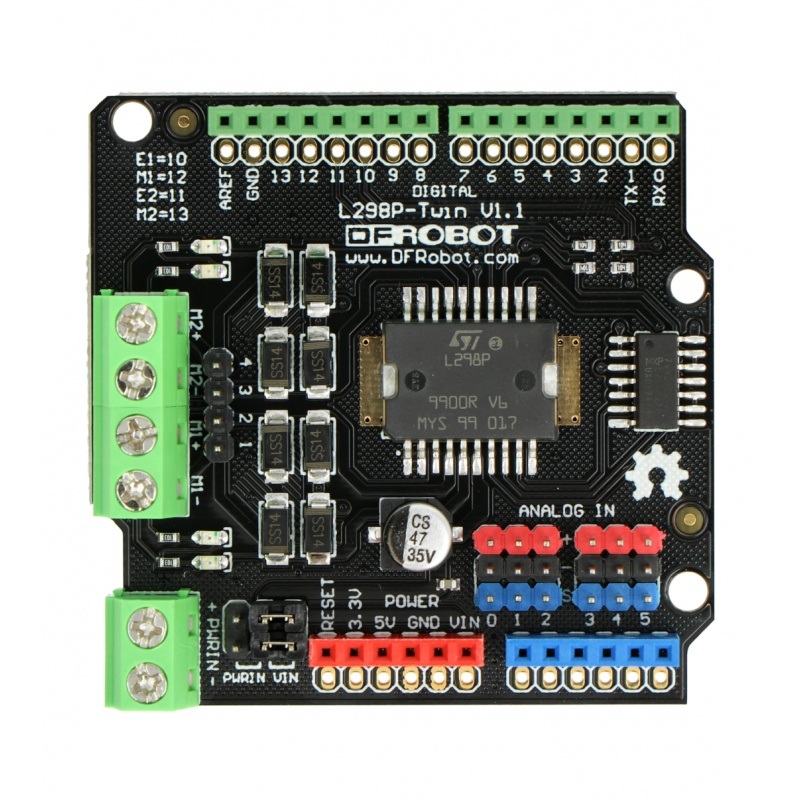
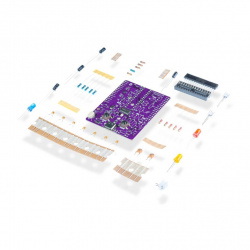
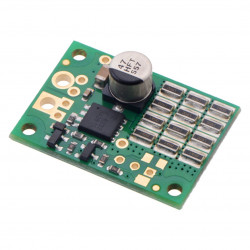
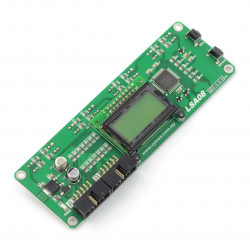
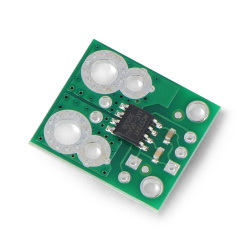
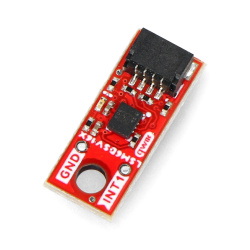
Rozmieszczenie elementów na płytce 2x2A Motor Shield.
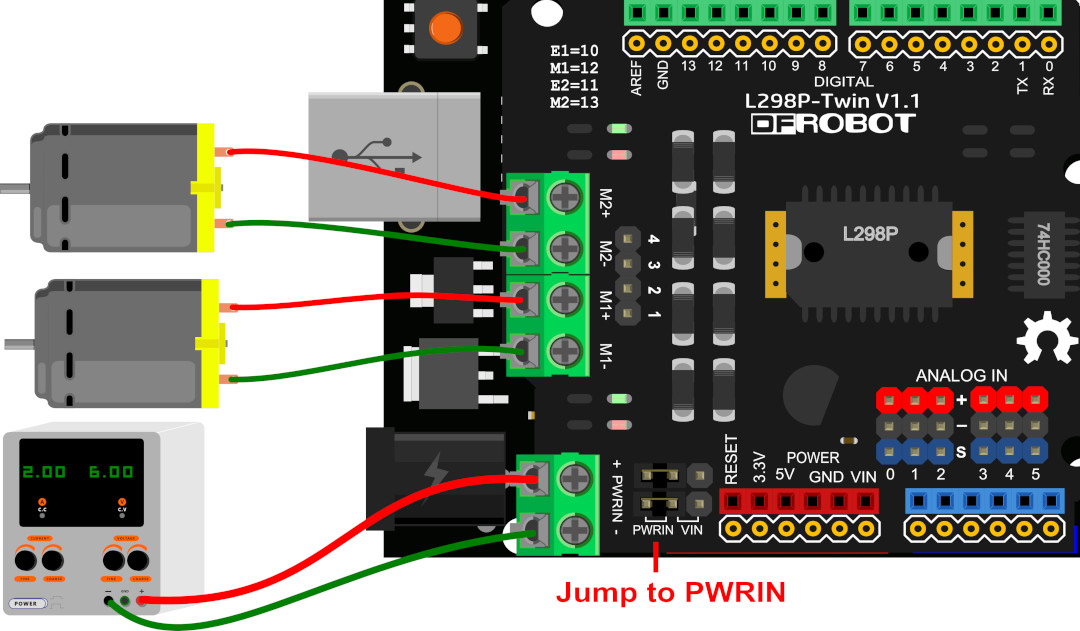
Przykładowy schemat połączenia.
| Ilość kanałów | 2 |
| Moduł - typ | Sterownik silników |
| Szerokość opakowania | 7 cm |
| Wysokość opakowania | 2.5 cm |
| Głębokość opakowania | 8 cm |
| Masa opakowania | 0.034 kg |
Jako pierwszy zadaj pytanie dotyczące tego produktu!
| Model |
Mikro kontroler |
Piny |
Pamięć Flash RAM EEPROM |
Zasilanie |
Interfejs |
|---|---|---|---|---|---|
|
|
Renesas RA4M1 48 MHz |
14 I/O 6 PWM 6 analog |
256 kB 32 kB - |
DC: 6-24V USB: 5V |
UART I2C SPI CAN DAC |
|
|
Renesas / ESP RA4M1 / 32-S3-Mini 48 MHz / 240 Mhz |
14 I/O 6 PWM 6 analog |
256 kB 32 kB - |
DC: 6-24V USB: 5V |
UART I2C SPI CAN DAC |
|
|
ATmega 328 16 MHz |
14 I/O 6 PWM 6 analog |
32 kB 2 kB 1 kB |
DC: 7-12V USB: 5V |
UART I2C SPI |
|
|
ATmega 4809 20 MHz |
14 I/O 5 PWM 6 analog |
48 kB 6 kB 256 B |
DC: 5-12V USB: 5V |
UART I2C SPI |
|
|
ATmega 32u4 16 MHz |
20 I/O 7 PWM 12 analog |
32 kB 2,5 kB 1 kB |
DC: 7-12V USB: 5V |
UART I2C SPI USB |
| Mega 2560
|
ATmega 2560 16 MHz |
54 I/O 16 analog |
256 kB 8 kB 4 kB |
DC: 7-12V |
UART I2C SPI |
|
|
AT91SAM 3X8E 84 MHz |
54 I/O 12 analog |
512 kB 96 kB - |
DC: 7-12V USB: 5V |
UART I2C SPI USB CAN |
|
|
STM 32H747XI 480 MHz + 240 MHz |
75 I/O 12 PWM 12 analog |
2 MB 1 MB - |
DC: 6-24V USB: 5V |
UART I2C SPI CAN |
|
|
ARM ATSAMD21G18 48 MHz |
20 I/O 10 PWM 6 analog |
256 kB 32 kB - |
DC: 7-12V USB: 5V |
UART I2C SPI |
|
|
ATmega 32u4 16 MHz |
20 I/O 12 analog |
32 kB 2,5 kB 1 kB |
DC: 7-12V USB: 5V |
UART I2C SPI |
|
|
ATmega 328 16 MHz |
22 I/O 8 analog |
32 kB 2 kB 1 kB |
DC: 7-12V USB: 5V |
UART I2C SPI |
|
|
ATmega 328 16 MHz |
14 I/O
6 PWM 6 analog |
32 kB 2 kB 1 kB |
DC: 7-12V USB: 5V |
UART I2C SPI |
Kraj pochodzenia: Chiny
Dane kontaktowe producenta: Zhiwei Robotics Corp. Unit 01, 26/F, A1 Shanghai T & I Tower, No. 1699 Zhongke Road, Pudong District, Shanghai, P.R.China [email protected]
Dane kontaktowe wprowadzającego na rynek UE: BOTLAND B. DERKACZ SP. K. Gola 25A - 63-640 Bralin