






















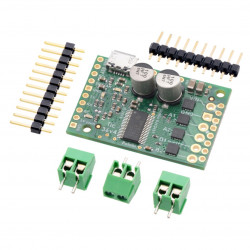



























































































































































































































































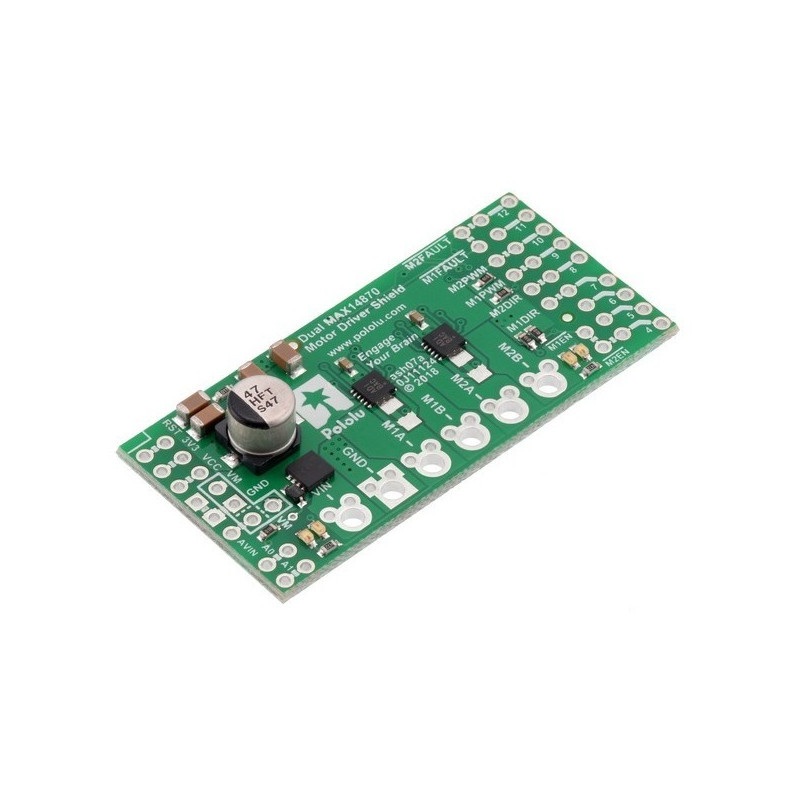













Moduł z dwukanałowym sterownikiem silników MAX14870 pracujący z napięciami od 4,5 V do 36 V i prądem do 1,7 A na kanał (maks. 2,5 A). Układ można połączyć bezpośrednio ze złączami Arduino. Moduł do samodzielnego montażu.
Moduł oparty na dwóch układach MAX14870 pozwala kontrolować silniki o napięciu zasilania do 36 V i ciągłym poborze prądu do 1,7 A. Sterownik wytrzymuje także kilkusekundowe skoki natężenia prądu do 2,5 A. Prędkość obrotową można kontrolować przy pomocy sygnału PWM.

W połączeniu z Arduino, przy wykorzystaniu specjalnie przygotowanej biblioteki można w prosty sposób kontrolować prędkość i kierunek obrotów dwóch silników prądu stałego. Kształt i wyprowadzenia płytki pozwalają na bezpośrednie połączenie z minikomputerem, tak jak przedstawiono na rysunkach. Układ wykorzystuje 16 pinów.
|
Produkt kompatybilny z Arduino Producent udostępnia bibliotekę dla użytkowników Arduino. |

MAX14870 - dwukanałowy sterownik silników 28 V / 1,7 A.
Poniższa tabela przedstawia, które piny Arduino są wykorzystywane przez sterownik silników:
|
Pin RPi GPIO |
Pin sterownika |
Opis |
|---|---|---|
| 4 | EN |
Domyślnie w stanie niskim, oznacza odłączone wyjścia silników. W celu uruchomienia sterownika, należy podać stan wysoki. |
| 12 | FAULT |
Wyjście błędu. Domyślnie w stanie wysokim. Sygnalizuje nadmierny prąd lub temperaturę. |
| 9 | Motor 1 PWM |
Wejście PWM do sterowania prędkością obrotową silnika. Maksymalna częstotliwość PWM wynosi 50 kHz. |
| 10 | Motor 2 PWM |
Wejście PWM do sterowania prędkością obrotową silnika. Maksymalna częstotliwość PWM wynosi 50 kHz. |
| 7 | Motor 1 DIR |
Pin wyboru kierunku obrotów. W stanie niskim prąd płynie z wyjścia A do B. W stanie wysokim - z B do A. |
| 8 | Motor 2 DIR | Pin wyboru kierunku obrotów. W stanie niskim prąd płynie z wyjścia A do B. W stanie wysokim - z B do A. |
Tabela przedstawia tryby pracy w zależności od wejść:
| EN | DIR | PWM | MxA | MxB | Tryb pracy |
|---|---|---|---|---|---|
| 0 | 0 | PWM | PWM (H/L) | L | Obroty w przód przy prędkości określonej PWM %. |
| 0 | 1 | PWM | L | PWM (H/L) | Obroty w tył przy prędkości określonej PWM %. |
| 1 | x | 0 | L |
L |
Hamowanie (wyjścia podłączone do masy). |
| 1 | x | x | Z | Z | Wyłączone wyjścia. |
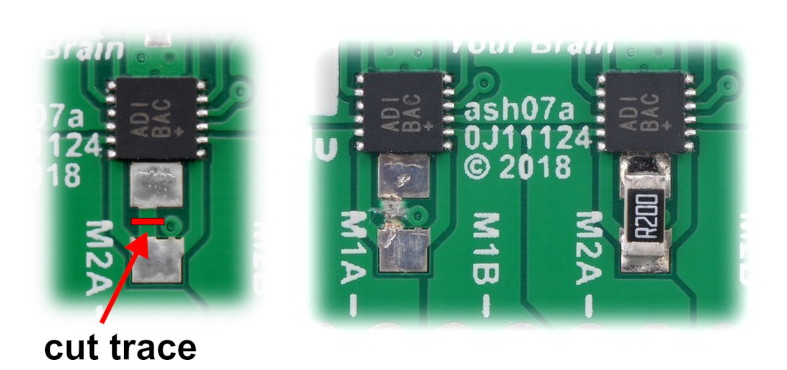
Układ MAX14870 posiada wejście SNS, które może służyć jako automatyczny ogranicznik prądu. Domyślnie jest podłączone do GND dla obu układów. Aby włączyć ograniczenie , należy najpierw przerwać ścieżkę między pinami rezystorów 1206. Następnie do tych wyprowadzeń należy podłączyć odpowiedni rezystor 1206.
Urządzenie umożliwia zasilanie samego minikomputera z napięcia wejściowego modułu. Nie należy podłączać zasilania do Arduino, gdyż grozi to uszkodzeniem płytki. Gdy napięcie wejściowe do silników jest odpowiednie dla Arduino należy przylutować zworkę AVIN=VM" oraz użyć niebieskich złącz śrubowych, aby zasilanie było z dala od Arduino. Jako że płytka może działać z napięciem znacznie większym niż mikrokontroler, bardzo ważne jest wykorzystywanie tej zworki tylko przy równym napięciu silników i Arduino. Gdy napięcie jest większe to polecamy zastosować przetwornicę D24V10F5 - przygotowano do tego specjalne otwory.

Przydatne linki |
| Napięcie zasil. od | 5.0 V |
| Napięcie zasil. do | 28.0 V |
| Wydajność prąd | 1.7 A |
| Szerokość opakowania | 8.5 cm |
| Wysokość opakowania | 0.8 cm |
| Głębokość opakowania | 7.5 cm |
| Masa opakowania | 0.012 kg |
Jako pierwszy zadaj pytanie dotyczące tego produktu!
| Model |
Mikro kontroler |
Piny |
Pamięć Flash RAM EEPROM |
Zasilanie |
Interfejs |
|---|---|---|---|---|---|
|
|
Renesas RA4M1 48 MHz |
14 I/O 6 PWM 6 analog |
256 kB 32 kB - |
DC: 6-24V USB: 5V |
UART I2C SPI CAN DAC |
|
|
Renesas / ESP RA4M1 / 32-S3-Mini 48 MHz / 240 Mhz |
14 I/O 6 PWM 6 analog |
256 kB 32 kB - |
DC: 6-24V USB: 5V |
UART I2C SPI CAN DAC |
|
|
ATmega 328 16 MHz |
14 I/O 6 PWM 6 analog |
32 kB 2 kB 1 kB |
DC: 7-12V USB: 5V |
UART I2C SPI |
|
|
ATmega 4809 20 MHz |
14 I/O 5 PWM 6 analog |
48 kB 6 kB 256 B |
DC: 5-12V USB: 5V |
UART I2C SPI |
|
|
ATmega 32u4 16 MHz |
20 I/O 7 PWM 12 analog |
32 kB 2,5 kB 1 kB |
DC: 7-12V USB: 5V |
UART I2C SPI USB |
| Mega 2560
|
ATmega 2560 16 MHz |
54 I/O 16 analog |
256 kB 8 kB 4 kB |
DC: 7-12V |
UART I2C SPI |
|
|
AT91SAM 3X8E 84 MHz |
54 I/O 12 analog |
512 kB 96 kB - |
DC: 7-12V USB: 5V |
UART I2C SPI USB CAN |
|
|
STM 32H747XI 480 MHz + 240 MHz |
75 I/O 12 PWM 12 analog |
2 MB 1 MB - |
DC: 6-24V USB: 5V |
UART I2C SPI CAN |
|
|
ARM ATSAMD21G18 48 MHz |
20 I/O 10 PWM 6 analog |
256 kB 32 kB - |
DC: 7-12V USB: 5V |
UART I2C SPI |
|
|
ATmega 32u4 16 MHz |
20 I/O 12 analog |
32 kB 2,5 kB 1 kB |
DC: 7-12V USB: 5V |
UART I2C SPI |
|
|
ATmega 328 16 MHz |
22 I/O 8 analog |
32 kB 2 kB 1 kB |
DC: 7-12V USB: 5V |
UART I2C SPI |
|
|
ATmega 328 16 MHz |
14 I/O
6 PWM 6 analog |
32 kB 2 kB 1 kB |
DC: 7-12V USB: 5V |
UART I2C SPI |
Kraj pochodzenia: Stany Zjednoczone
Dane kontaktowe producenta: Pololu Corporation 920 Pilot Rd. Las Vegas, NV 89119 USA [email protected]
Dane kontaktowe wprowadzającego na rynek UE: BOTLAND B. DERKACZ SP. K. Gola 25A - 63-640 Bralin