






















































































































































































































































































































































































































Mocne serwo typu standard. Pracuje jako silnik DC. Zasilane napięciem od 4,8 V do 6,6 V.
Prędkość: 0,15 s./60°.
Moment: 11 kg*cm.
Wymiary: 40,7 x 19,7 x 42,9 mm.
Masa: 55 g.
Mocne serwo typu standard. Pracuje jako silnik DC. Zasilane napięciem od 4,8 V do 6,6 V.

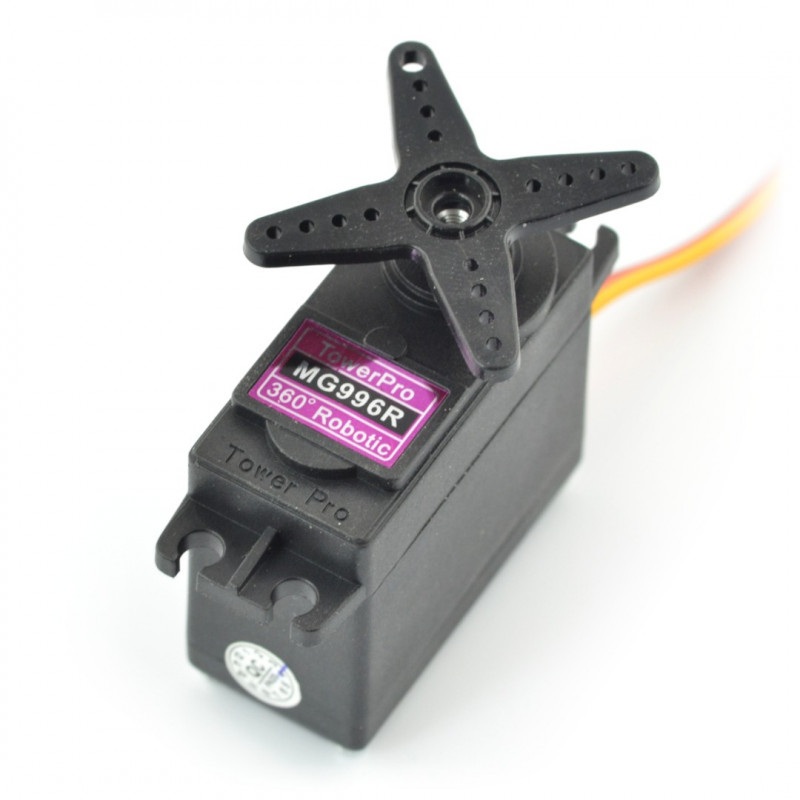
Serwo TowerPro MG-996R Robot 360 praca ciągła 360 stopni.

W naszej ofercie posiadamy także przewody oraz sterowniki serw.
Częstotliwość sygnału sterującego to standardowe dla serwomechanizmów modelarskich 50 Hz z wypełnieniem z zakresu 1 - 2 ms. Podanie wartości wyższej niż próg ok. 1,5 ms powoduje ruch serwomechanizmu w jedną stronę, z prędkością maksymalną. Analogicznie podanie wartości niższej spowoduje ruch w drugą stronę. Serwo nie zwalnia w okolicy środka zakresu.
Solidne serwo TowerPro MG-996R Robot 360 jest wyposażone w szereg akcesoriów, umożliwiających pewne zamontowanie zarówno samego serwomechanizmu, jak i elementów przeniesienia napędu. W komplecie, oprócz serwa, znajduje się zestaw elementów montażowych (cztery śruby mocujące wraz z mosiężnymi tulejkami oraz wibroizolatorami), a także cztery orczyki w różnych rozmiarach i kształtach: dwa okrągłe, jeden 4-ramienny oraz jeden sześcioramienny.
Serwa do pracy ciągłej 360° mają diametralnie inną konstrukcję oraz zakres zastosowań w porównaniu do konwencjonalnych serwomechanizmów modelarskich o ograniczonym kącie obrotu. W tym przypadku sterowanie odbywa się wprawdzie także przez podanie sygnału PWM na wejście kontrolne, ale zmienną podlegającą regulacji jest prędkość obrotów (oraz kierunek), a nie pozycja kątowa orczyka.
Serwomechanizmy 360o przypominają pod względem funkcjonalnym zwykłe silniki DC z przekładnią. Istnieje jednak spora różnica w elektronicznej metodzie sterowania – zamiast mostka H, niezbędnego do uruchomienia zwykłego silnika komutatorowego, w tym przypadku wystarczy zwykłe wyjście cyfrowe PWM – wejście serwa może być zatem podłączone bezpośrednio do portu mikrokontrolera. Takie rozwiązanie znacząco upraszcza konstrukcję elektroniki sterującej.
| Długość | 41 mm |
| Szerokość | 20.0 mm |
| Wysokość | 43 mm |
| Napięcie zasil. od | 4.8 V |
| Napięcie zasil. do | 6.6 V |
| Moment obrotowy | 11.0 kg*cm |
| Masa | 55 g |
| Serwo - Zakres | 360 ° |
| Serwo - Rozmiar | standard |
| Serwo - prędkość | 0,15 s/60° |
| Serwo - Rodzaj | analogowe |
| Klasyfikacja GPSR | Komponent |
| Szerokość opakowania | 8 cm |
| Wysokość opakowania | 2 cm |
| Głębokość opakowania | 12 cm |
| Masa opakowania | 0.07 kg |
Jako pierwszy zadaj pytanie dotyczące tego produktu!

Informacja o produkcie
Produkt jest komponentem przeznaczonym do dalszego montażu/prototypowania. Nie stanowi on samodzielnego wyrobu gotowego w rozumieniu przepisów o bezpieczeństwie produktów.
Dane GPSR
Kraj pochodzenia: Chiny
Dane kontaktowe producenta: SHEN ZHEN YOU MAI KE TECHNOLOGY COLTD 2 Floor,C Building,Mingxin Industrial Park,No.28,Hualong Road Longhua District, Shenzhen, 518109 China Phone: 8617724681799
Dane kontaktowe wprowadzającego na rynek UE: BOTLAND B. DERKACZ SP. K. Gola 25A - 63-640 Bralin

