
















































































































































































































































































































































































- Produkt wycofany

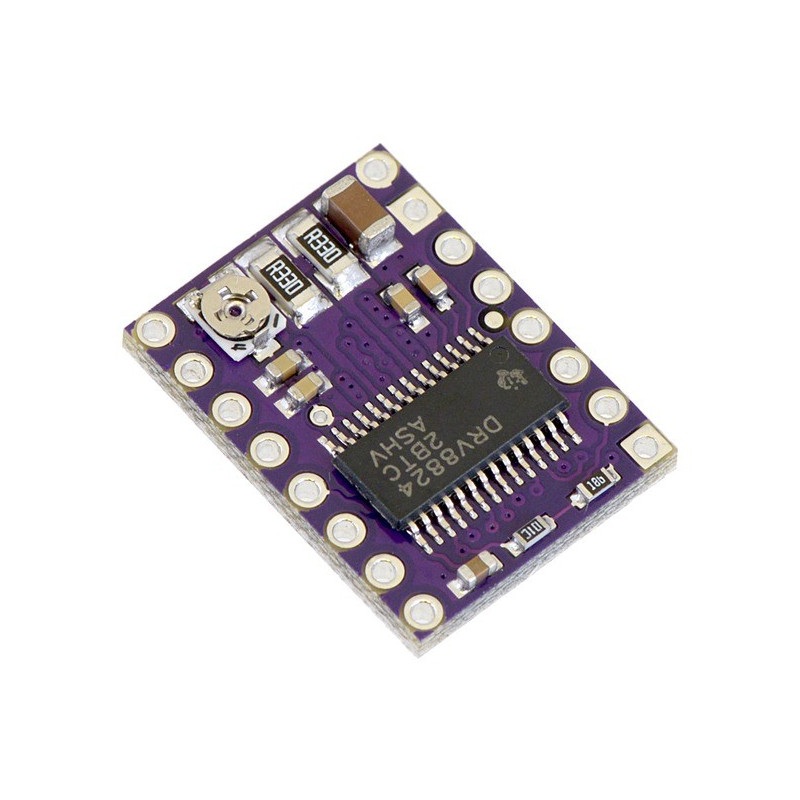








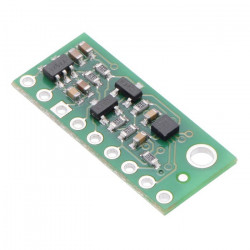
Sterownik silnika krokowego oparty na układzie DRV8824 jest wersją nisko-prądową modułu DRV8825. Pozwala na pobór do 0,75A (z chłodzeniem do 1,2A) na cewkę, przy zasilaniu napięciem do 45V. Posiada sześć trybów sterowania: pełny krok ,1/2, 1/4, 1/8, 1/16 oraz 1/32 kroku.
|
Uwaga! Sprzedaż produktu została zakończona. Sprawdź inne urządzenia w tej kategorii. |
 Specyfikacja
Specyfikacja
Moduł oparty na sterowniku DRV8824 firmy Texas Instruments, pozwala kontrolować silnik krokowy o maksymalnym poborze prądu do 0,75A na cewkę (przy użyciu chłodzenia do 1,2 A). Zasilany jest napięciem z zakresu od 8,2V do 45V. Przed użyciem zalecamy zapoznanie się z dokumentacją sterownika DRV8824. Poniżej kilka cech głównych produktu:
W naszej ofercie znajduje się również wersja DRV8825 dla silników o wyższej mocy. DRV8825 pozwala na pobór prądy do 1,5 A na cewkę (do 2,2 A z dodatkowym chłodzeniem).
|
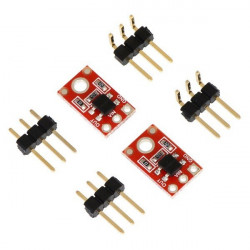
Zestaw zawiera wszystkie niezbędne elementy do podłączenia sterownika - moduł oraz złącza do samodzielnego lutowania. Na życzenie klienta możemy dostarczyć układ ze zlutowanymi konektorami. W tym celu prosimy o zostawienie informacji w komentarzu do zamówienia. |
Aby sterować silnikiem krokowym bipolarnym należy podłączyć układ zgodnie z poniższym rysunkiem. Sterownik pozwala także na pracę z niektórymi silnikami unipolarnymi, szczegóły znajdują sie w instrukcji.

Jeden impuls podany na pin STEP powoduje jeden krok silnika w kierunku wybranym poprzez podanie odpowiedniego stanu logicznego na pin DIR. Wyprowadzenia STEP oraz DIR nie są wewnętrznie podciągnięte. Jeśli silnik ma się kręcić tylko w jednym kierunku pin DIR można na stałe podłączyć do VCC lub GND.
Układ posiada jeszcze trzy wejścia do kontrolowania poboru mocy: RESET SLP i EN, ich opis znajduję sie w dokumentacji. Należy zwrócić uwagę, że wyprowadzenia te nie są do niczego podłączone. Jeśli nie będą używany do kontrolowania trybów poboru mocy, należy je zewnętrznie podciągnąć do napięcia zasilania (podać stan wysoki - logiczną jedynkę z zakresu 2,2 V do 5,5 V).

Sterownik DRV8824 posiada również wyprowadzenie oznaczone jako FAULT. Stanem niskim (logicznym zerem) sygnalizuje ono pojawienie się nieprawidłowości w pracy układu np. zadziałanie jednego z zabezpieczeń. Na płytce wyprowadzenie zostało połączone z pinem SLEEP, a więc podanie stanu wysokiego na pin SLEEP podciąga do VCC (pull-up) także FAULT. Dzięki zastosowaniu szeregowego rezystora zabezpieczającego wyprowadzanie FAULT można również podłączyć do napięcia VCC, co czyni moduł pin-kompatybilnym z wersja A4988.
Układ można zasilać napięciem z zakresu 8,2V do 45V podłączanym między piny VMOT (+) i GND (-). Napięcie powinno być filtrowane poprzez zewnętrzny kondensator umieszczony jak najbliżej płytki sterownika. Jego pojemność zależna jest od maksymalnego prądu pobieranego przez silnik.
|
Uwaga! W pewnych warunkach nawet stosunkowo niskie napięcie zasilania może spowodować szpilki o dużej amplitudzie przekraczającej wartość dopuszczalną 45 V. Taka sytuacja prowadzi do trwałego uszkodzenia układu. Jednym ze sposobów uniknięcia tego problemu jest umieszczenie kondensatora (przynajmniej 47 uF), jak najbliżej pinów VMOT i GND modułu sterownika.
Podłączanie i odłączanie silnika, podczas gdy sterownik jest włączony może uszkodzić układ. |
Sterownik mikrokrokowy taki jak DRV8824 pozwala na pracę silnika z wysoką rozdzielczością do 1/32 kroku. Rozmiar kroku wybierany jest za pomocą wejść MODE1, MODE1 i MODE2 - dostępne tryby zostały pokazane w tabeli poniżej. Domyślnie wszystkie trzy wyprowadzenia ściągnięte są do masy poprzez rezystor (pull-down) 100kΩ. Pozostawienie ich nie podłączonych oznacza więc wybór trybu pracy z pełnym krokiem. Przykładowo przy użyciu silnika o rozdzielczości 200 kroków na obrót, wybór trybu ¼ kroków oznacza pracę w rozdzielczości 800 pozycji na obrót.
| MODE0 | MODE1 | MODE2 | ROZDZIELCZOŚĆ |
| Low | Low | Low | Pełny krok |
| High | Low | Low | 1/2 kroku |
| Low | High | Low | 1/4 kroku |
| High | High | Low | 1/8 kroku |
| Low | Low | High | 1/16 kroku |
| High | Low | High | 1/32 kroku |
| Low | High | High | 1/32 kroku |
| High | High | High | 1/32 kroku |
Aby zachować wysoką prędkość przełączania kroków, można zastosować wyższe napięcie zasilania silnika niż nominalne. Należy tylko ograniczyć maksymalny prąd (do wartości katalogowej silnika) przepływający przez cewki.
Moduł pozwala na aktywne ograniczenie prądu przy pomocy potencjometru. Jednym ze sposobów wprowadzenia ograniczenia jest ustawienie sterownika w tryb pełnego kroku oraz pomiar prądu przepływającego przez jedną cewkę bez podawania sygnału na wejście STEP. Zmierzony prąd to 70 % ustawionego limitu (obie cewki są zawsze włączone i ograniczone do 70 % w trybie pełnego kroku).
Innym sposobem jest pomiar napięcia na wyprowadzeniu REF (oznaczonego kółkiem na płytce drukowanej) oraz obliczenie aktualnego limitu (rezystory pomiarowe mają wartość 0.330Ω). Limit prądowy można policzyć ze wzoru:
Current Limit = VREF * 0,61
Przykładowo, jeśli silnik może pobierać maksymalnie do 0,5 A, to napięcie referencyjne na pinie VREF powinno mieć wartość 0,82 V.
Płytka została zaprojektowana tak, aby mogła odprowadzić ciepło przy poborze prądu około 0,5A na cewkę. Jeśli prąd będzie znacznie wyższy należy zastosować zewnętrzny radiator, który można zamontować przy pomocy kleju termoprzewodzącego.
Układ zawiera niezbędne komponenty pasywne do poprawnego działania sterownika. Schemat połączeń przedstawiony został na rysunki poniżej.

Moduł DRV8824 został zaprojektowany w taki sposób, aby był kompatybilny z wersją opartą na układzie A4988. Płytki posiadają ten sam kształt, rozmiar i rozkład wyprowadzeń. Jest jednak kilka różnić pomiędzy nimi:
 Pin używany jako napięcie zasilania części logicznej A4988 został zastąpiony pinem FAULT, ponieważ DRV8825 nie wymaga dodatkowego zasilania. FAULT został podłączony przez rezystor zabezpieczający, a więc z powodzeniem może być stosowany w system projektowanych dla modułu A4988, gdzie na ten pin będzie podane napięcie zasilania częsci logicznej (2,2V do 5,5V).
Pin używany jako napięcie zasilania części logicznej A4988 został zastąpiony pinem FAULT, ponieważ DRV8825 nie wymaga dodatkowego zasilania. FAULT został podłączony przez rezystor zabezpieczający, a więc z powodzeniem może być stosowany w system projektowanych dla modułu A4988, gdzie na ten pin będzie podane napięcie zasilania częsci logicznej (2,2V do 5,5V).
Przydatne linki |
| Szerokość opakowania | 0.001 cm |
| Wysokość opakowania | 0.001 cm |
| Głębokość opakowania | 0.001 cm |
| Masa opakowania | 0.001 kg |
Jako pierwszy zadaj pytanie dotyczące tego produktu!
Kraj pochodzenia: Polska
Dane kontaktowe producenta: BOTLAND B. DERKACZ SP. K. Gola 25A - 63-640 Bralin [email protected]
Dane kontaktowe wprowadzającego na rynek UE: BOTLAND B. DERKACZ SP. K. Gola 25A - 63-640 Bralin [email protected]














