






























































































































































































































































































































































































































12-kanałowy kontroler serwomechanizmów z obsługą sygnałów cyfrowych i analogowych. Użytkownik ma do dyspozycji sterowanie serwami poprzez: aplikację PC (USB), interfejs szeregowy oraz prosty język skryptowy.
12-kanałowy kontroler serwomechanizmów z obsługą sygnałów cyfrowych i analogowych. Użytkownik ma do dyspozycji sterowanie serwami poprzez: aplikację PC (USB), interfejs szeregowy oraz prosty język skryptowy.
|
Produkt kompatybilny z Arduino Producent udostępnia bibliotekę w serwisie GitHub dla użytkowników Arduino. |
Sterownik serw Mini Maestro USB 12-kanałowy - Pololu 1352.
Film zrealizowany przez firmę Pololu przedstawiający możliwości produktu.
Seria Maestro to wszechstronne kontrolery serwomechanizmów potrafiące również interpretować sygnały cyfrowe i analogowe. Dzięki różnym opcjom sterowania, szerokiemu zakresowi napięć zasilania oraz prostej obsłudze, Maestro sprawdza się w wielu projektach wykorzystujących serwomechanizmy. W zależności od ilości używanych serw, użytkownik może wybrać odpowiednią wersję. Dostępne są 6, 12, 18 i 24 kanałowe moduły.
|
|
|
|
|
|
| Ilość kanałów: | 6 | 12 | 18 | 24 |
| Ilość wejść analogowych: | 6 | 12 | 12 | 12 |
| Ilość wejść cyfrowych: | 0 | 0 | 6 | 12 |
| Szerokość [mm]: | 21,6 | 27,9 | 27,9 | 27,9 |
| Długość [mm]: | 30,5 | 36,1 | 45,7 | 58,4 |
| Masa [g]: | 3,0 | 4,2 | 4,9 | 6,0 |
| Częstotliwość impulsów: | 33-100 Hz | 1-333 Hz | 1-333 Hz | 1-333 Hz |
| Zakres impulsów: | 64–3280 μs | 64–4080 μs | 64–4080 μs | 64–4080 μs |
| Rozmiar skryptu: | 1 KB | 8 KB | 8 KB | 8 KB |
Użytkownik może dostosować kontroler do potrzeb swojego projektu, wybierając spośród trzech różnych interfejsów komunikacyjnych:
USB aplikacja komputerowa - urządzenie łączy się z komputerem za pomocą przewodu mini USB. Do obsługi kontrolera służy intuicyjny program, który umożliwia między innymi:
W celu skorzystania opcji sterowania poprzez USB wystarczy pobrać program na dysk (wersja: Windows, Linux), uruchomić go oraz podłączyć kontroler do dowolnego portu USB komputera.
Interfejs szeregowy (UART) - interfejs pozwala na połączenie Maestro z jednostką centralną, którą może być dowolny mikrokontroler lub zestaw uruchomieniowy np. Arduino, STM32Discovery bądź Rasbperry Pi. Obsługa serwomechanizmów obywa się poprzez wysyłanie specjalnych komend znakowych. Przykłady wraz z opisem poleceń można znaleźć w instrukcji.
Skrypt - wybierając tę opcję, użytkownik może stworzyć i zapisać w pamięci Maestro wybraną sekwencje zdarzeń np. uzależnić pozycję serwa od poziomu napięcia na wejściu analogowym, do którego podłączony będzie dowolny czujnik analogowy np. żyroskop, akcelerometr lub dalmierz. Opis języka skryptowego wraz z przykładami wykorzystania można znaleźć w instrukcji.
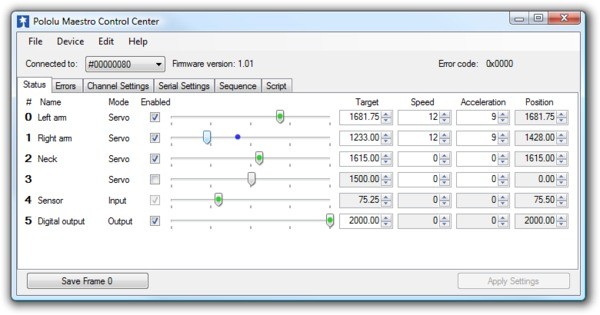
Aplikacja komputerowa pozwalająca kontrolować pozycję i prędkość serw, odczytywać i zapisywać stany I/O poprzez przewód USB.
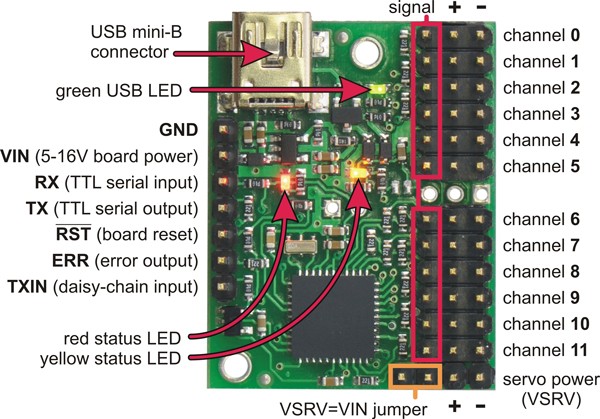
Rozkład wyprowadzeń sterownika Maestro.
Wyprowadzenia to popularne listwy goldpin (raster 2,54), dopasowane do standardowych złącz serwomechanizmów i przewodów połączeniowych.
* Przy podłączeniu przewodu USB urządzenie pobiera o 10 mA więcej
| Napięcie zasil. od | 5.0 V |
| Napięcie zasil. do | 16.0 V |
| Wydajność prąd | źródła |
| Ilość kanałów | 12 |
| Klasyfikacja GPSR | Komponent |
| Szerokość opakowania | 7.5 cm |
| Wysokość opakowania | 1 cm |
| Głębokość opakowania | 8.5 cm |
| Masa opakowania | 0.009 kg |
Jako pierwszy zadaj pytanie dotyczące tego produktu!

Informacja o produkcie
Produkt jest komponentem przeznaczonym do dalszego montażu/prototypowania. Nie stanowi on samodzielnego wyrobu gotowego w rozumieniu przepisów o bezpieczeństwie produktów.
Dane GPSR
Kraj pochodzenia: Stany Zjednoczone
Dane kontaktowe producenta: Pololu Corporation 920 Pilot Rd. Las Vegas, NV 89119 USA [email protected]
Dane kontaktowe wprowadzającego na rynek UE: BOTLAND B. DERKACZ SP. K. Gola 25A - 63-640 Bralin



 Micro
Micro








