Uniwersalna platforma z dwoma kołami i kulką podporową. Posiada dwa micro silniki prądu stałego, które można kontrolować przy pomocy dowolnego mikrokontrolera (w tym Arduino lub Raspberry) ze sterownikiem silników. Posiada czujnik linii, moduł mierzenia prędkości, czujnik zbliżeniowy na podczerwień, pilot zdalnego sterowania oraz moduł Uno Plus, serwo i ultradźwiękowy czujnik odległości.




Podwozie AlphaBot to dwukołowa platforma do budowy robota mobilnego. W zestawie znajdują się platforma, dwa micro silniki prądu stałego z kołami i dedykowanymi mocowaniami. Dodatkowo do zestawu dołączono czujnik linii, moduł mierzenia prędkości, czujnik zbliżeniowy na podczerwień oraz pilot zdalnego sterowania oraz moduł Uno Plus, serwo i ultradźwiękowy czujnik odległości. Platforma jest kompatybilna z popularnymi mini kontrolerami, np. Arduino lub Raspberry Pi (można je podłączyć osobno, jak również mogą pracować razem).
Platforma jest prosta w montażu, w celu uruchomienia robota wystarczy przykręcić silniki, założyć koła oraz dodać dowolny kontroler (np. Arduino Uno). Na platformie znajdują się sterownik silników LM298P, regulator napięcia LM2596 dla stabilnego napięcia 5 V oraz przetwornik A/C TLC1543 pozwalający na korzystanie z analogowych sensorów razem z Raspberry Pi. Posiada również wiele złącz ułatwiających podłączenie dodatkowych modułów.
|
Produkt kompatybilny z Arduino i Raspberry Pi Producent udostępnia przewodnik użytkownika wraz z przykładowym programem dla Arduino i Raspberry. |

AlphaBot Basic - 2-kołowa platforma robota z czujnikami i napędem DC + Uno Plus.
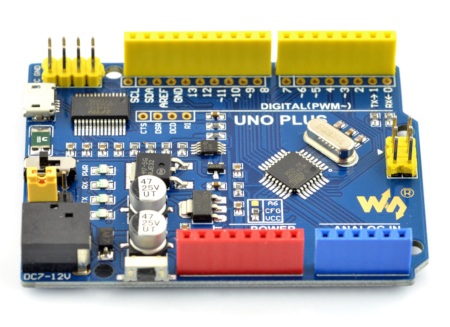
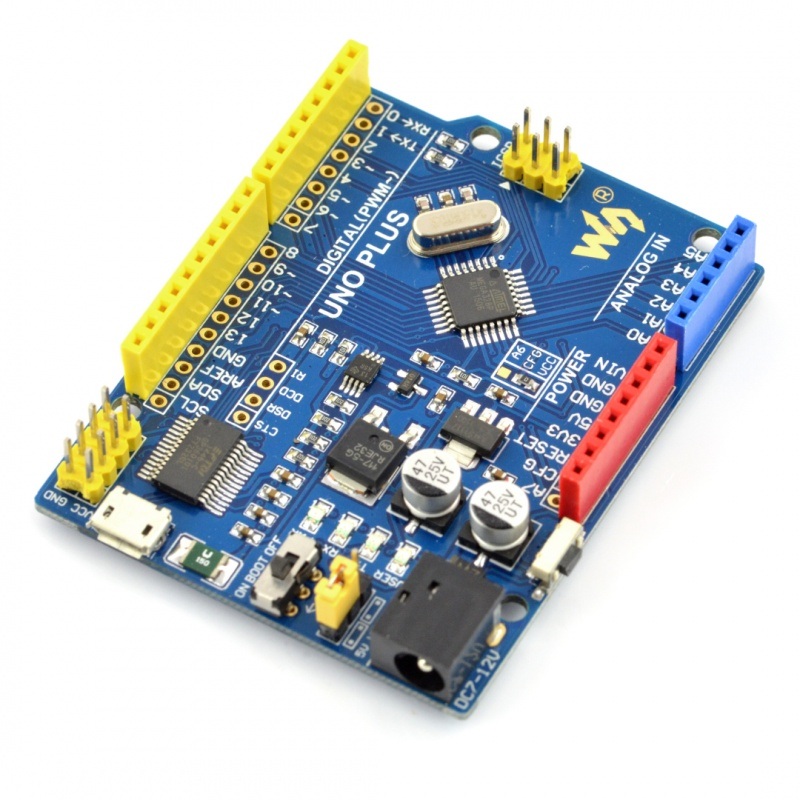
Płytka zawiera mikrokontroler ATmega328.
Uno Plus jest zgodny z popularnym modułem Arduino Uno. Oznacza to, że może być programowany poprzez środowisko Arduino IDE z wykorzystaniem dostępnych bibliotek. Nakładki, tzw. Arduino Shield również będą współpracowały z modułem firmy Waveshare.
Płytka zawiera mikrokontroler ATmega328, wyposażony w 14 cyfrowych wejść/wyjść z czego 6 można używać jako wyjścia PWM (np. do sterowania silnikami) i 6 jako analogowe wejścia. Układ taktowany jest sygnałem zegarowym o częstotliwości 16 MHz. Moduł posiada także: złącze USB, gniazdo zasilające DC, przycisk RESET oraz wyprowadzenia służące do podłączenia programatora AVR.

|
Zestaw wymaga samodzielnego montażu, producent udostępnia instrukcję w postaci pliku pdf. |
W zestawie znajdują się:
| L.p. | Zdjęcie | Opis |
|---|---|---|
| 1 | 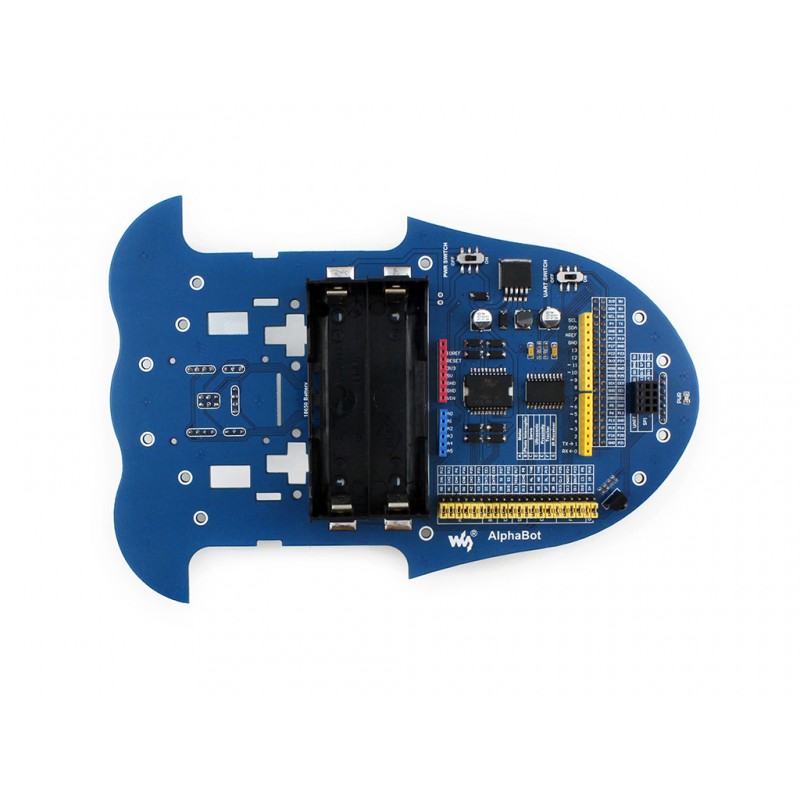 |
Płytka główna AlphaBot. |
| 2 | 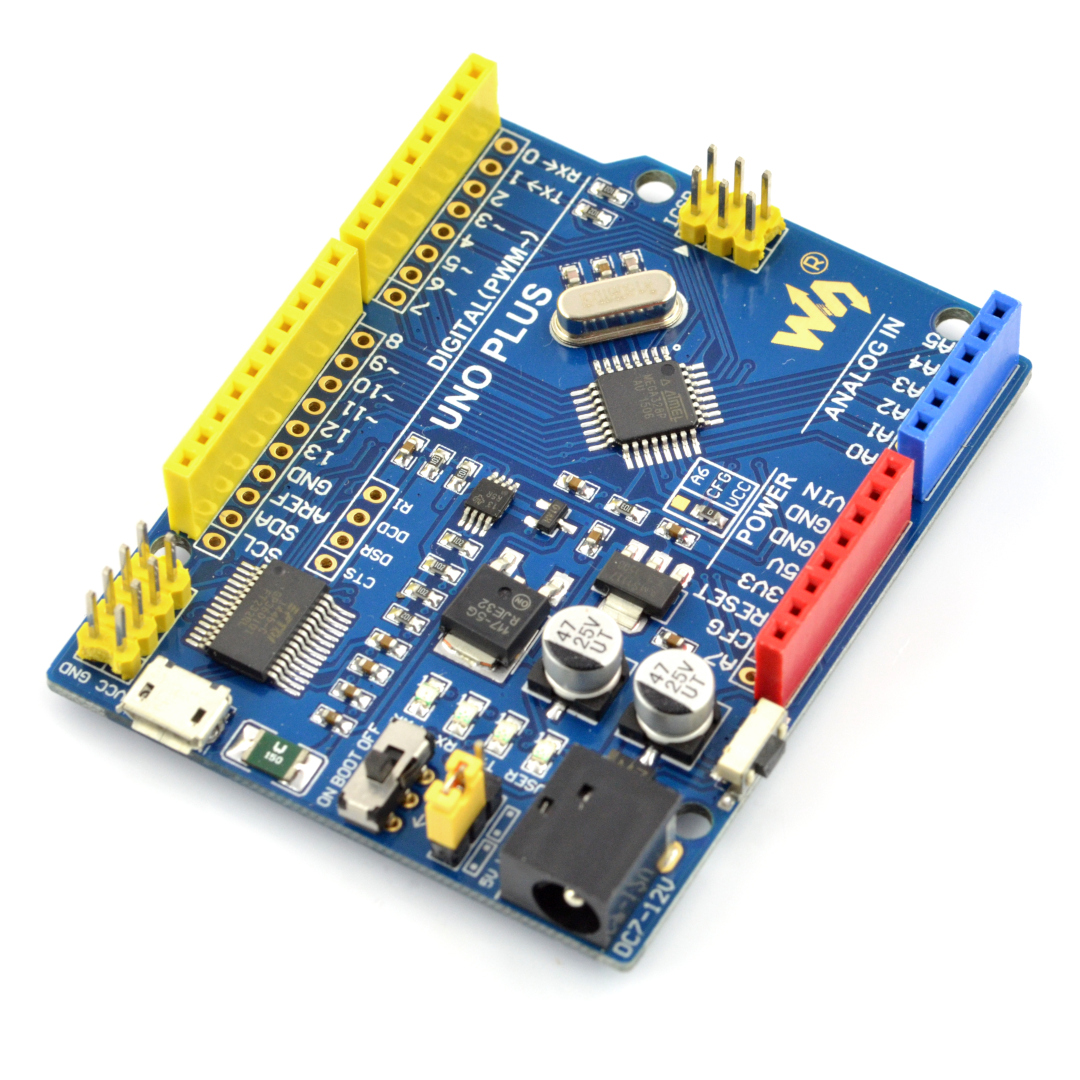 |
Waveshare Uno Plus. |
| 3 | 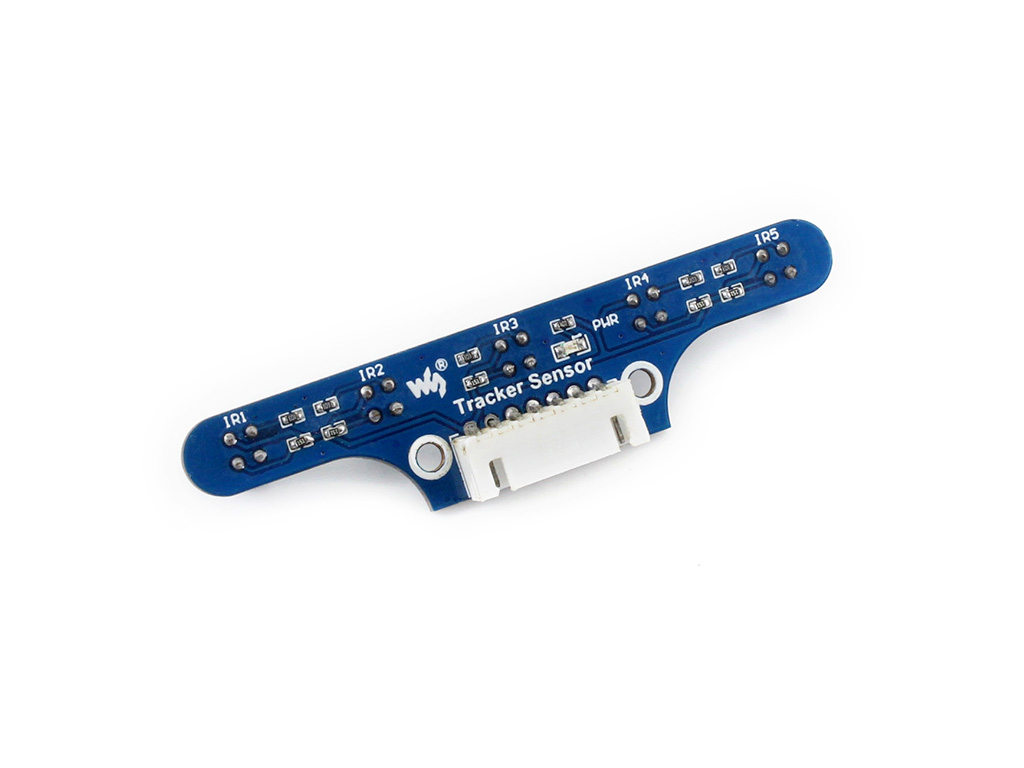 |
Czujnik linii (line follower). |
| 4 |  |
Czujnik szczelinowy - 2 szt. |
| 5 |  |
Czujnik zbliżeniowy na podczerwień - 2 szt. |
| 6 |  |
Ultradźwiękowy czujnik odległości. |
| 7 |  |
Silnik z przekładnią - 2 szt. |
| 8 |  |
Serwo typu micro. |
| 9 |  |
Koło - 2 szt. |
| 10 |  |
Akrylowe podwozie. |
| 11 |  |
Uchwyty do mocowania silnika - 4 szt. |
| 12 |  |
Kulka podporowa. |
| 13 |  |
20 slotowy dysk enkodera. |
| 14 |  |
Pilot sterowania IR. |
| 15 | 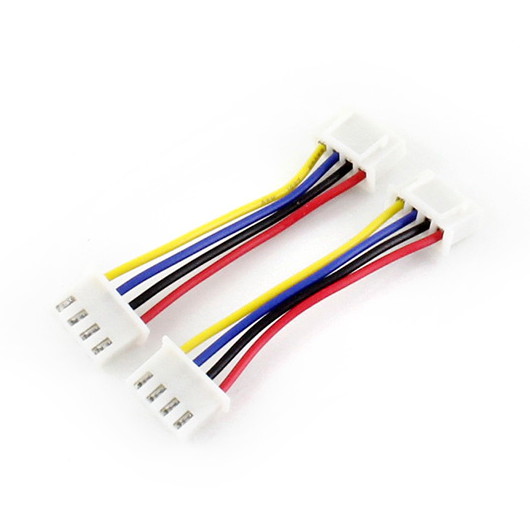 |
Przewód połączeniowy 4-pinowy, 4 cm, raster 2,54 mm - 2 szt. |
| 16 |
|
Przewód połączeniowy 3-pinowy, 4 cm, raster 2,54 mm - 2 szt. |
| 17 |  |
Przewód połączeniowy 7-pinowy, 4 cm, raster 2,54 mm |
| 18 |  |
Przewód USB-microUSB. |
| 19 |  |
Śrubki i dystanse. |
|
Zestaw nie zawiera akumulatorów 18650. Należy je zakupić osobno. |
| Podwozie - ilość kół | 2 |
| Podwozie - typ | kołowe |
| Podwozie + napęd | Tak |
| Podwozie + sterownik | Tak |
| Test | 3 |
| Klasyfikacja GPSR | Komponent |
| Szerokość opakowania | 23.4 cm |
| Wysokość opakowania | 7.1 cm |
| Głębokość opakowania | 16.8 cm |
| Masa opakowania | 0.645 kg |
Jako pierwszy zadaj pytanie dotyczące tego produktu!

Informacja o produkcie
Produkt jest komponentem przeznaczonym do dalszego montażu/prototypowania. Nie stanowi on samodzielnego wyrobu gotowego w rozumieniu przepisów o bezpieczeństwie produktów.
Dane GPSR
Kraj pochodzenia: Chiny
Dane kontaktowe producenta: Seednew Limited 3/F, Building 6, Shanglilang Zhichuangyuan, Pingji Avenue, Nanwan Street, Longgang District, Shenzhen, 518115, China
Dane kontaktowe wprowadzającego na rynek UE: BOTLAND B. DERKACZ SP. K. Gola 25A - 63-640 Bralin